

2.6. Интерполяционные полиномы для дискретизованной области
Интерполяционный полином в общей форме имеет вид
 . (2.43)
. (2.43)
где
![]() – число узлов элемента, верхний индекс
– число узлов элемента, верхний индекс![]() означает произвольный элемент.
означает произвольный элемент.
Техника включения
элемента в область может быть
проиллюстрирована на примере простой
пятиэлементной конфигурации, показанной
на рис. 2.12 Узлы пронумерованы от единицы
до шести. Величины
![]() ,
,![]() ,
,![]() ,
,![]() ,
,![]() ,
,![]() представляют собой глобальные свободы.
Координаты узлов
представляют собой глобальные свободы.
Координаты узлов![]() ,
,![]() ,
известны. Номера элементов записаны в
круглых скобках.
,
известны. Номера элементов записаны в
круглых скобках.
Для обозначения
номеров узлов элемента могут быть
использованы принятые выше индексы
![]() ,
,![]() и
и![]() ,
как только определен первый узел в
каждом элементе. На рис. 2.12
,
как только определен первый узел в
каждом элементе. На рис. 2.12![]() -й
узел в каждом элементе выделен звездочкой.
Выбор этого узла совершенно произволен,
хотя читатель вскоре сам убедится в
удобстве именно такого расположения
первых узлов. Узлы‚ м
-й
узел в каждом элементе выделен звездочкой.
Выбор этого узла совершенно произволен,
хотя читатель вскоре сам убедится в
удобстве именно такого расположения
первых узлов. Узлы‚ м![]() и
и![]() следуют за
следуют за![]() -м
узлом в направлении против часовой
стрелки. Фиксирование узла
-м
узлом в направлении против часовой
стрелки. Фиксирование узла![]() позволяет записать следующие равенства
для первого элемента:
позволяет записать следующие равенства
для первого элемента:
![]() ,
,
![]() ,
,![]() .
.
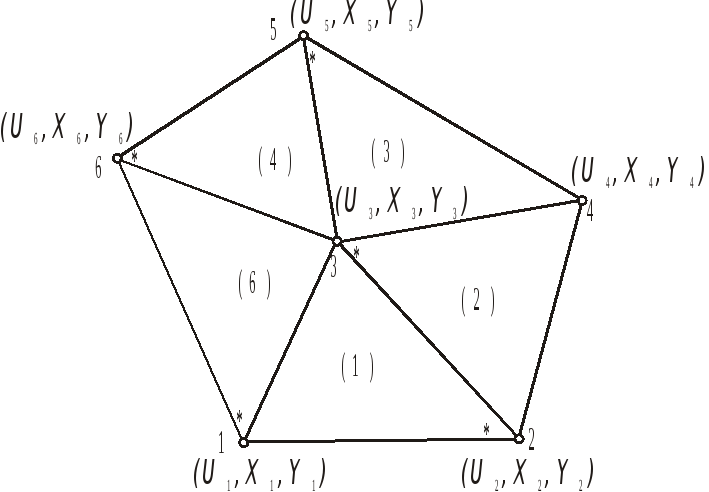
Рис. 2.13. Пятиэлементная область
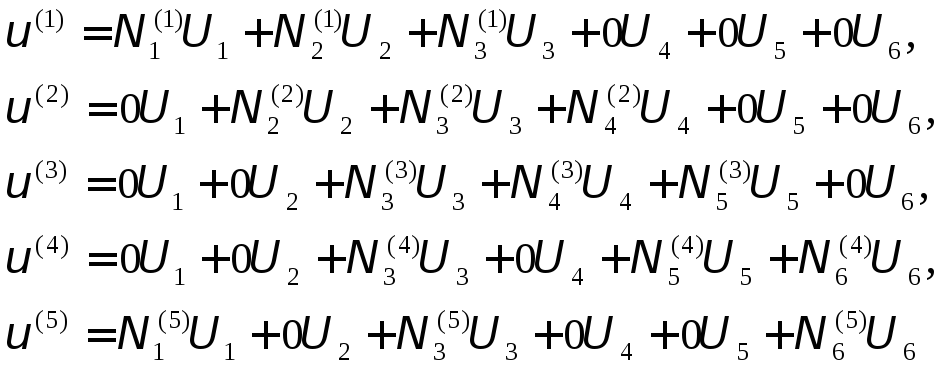
Соответствие такого же типа может быть установлено для других элементов:
элемент 2:
![]() ,
,![]() ,
,![]() ,
,
элемент 3:
![]() ,
,![]() ,
,![]() ,
,
элемент 4:
![]() ,
,![]() ,
,![]() ,
,
элемент 5:
![]() ,
,![]() ,
,![]() ,
,
С помощью этих
соотношений можно осуществить включение
элемента в область, так как они ставят
в соответствие индексы элемента
![]() ,
,![]() и
и![]() глобальным номерам узлов. Этот процесс
фиксирует координаты узлов элемента.
глобальным номерам узлов. Этот процесс
фиксирует координаты узлов элемента.
Значения индексов
![]() ,
,![]() и
и![]() могут быть подставлены в формулу (2.43),
что приводит к следующей совокупности
уравнений для элементов
могут быть подставлены в формулу (2.43),
что приводит к следующей совокупности
уравнений для элементов
 ,
(2.44)
,
(2.44)
Функции формы –
множители при узловых значениях в
формулах (2.44) – определяются подстановкой
числовых значений
![]() ,
,![]() и
и![]() в уравнения для функций формы.
в уравнения для функций формы.
С помощью уравнений
(2.44) достигается основная цель. Конечные
элементы объединяются в ансамбль, а
интерполяционные функции выражаются
через глобальные узловые значения и
глобальные координаты, которые вводятся
вместо произвольных
![]() ,
,![]() и
и![]() .
.
Каждое из уравнений в системе (2.44) содержит глобальные узловые значения, но относится к конкретному элементу. Мы будем а дальнейшем использовать расширенную форму этих уравнений, которая имеет вид
 ,
(2.45)
,
(2.45)
Эти уравнения можно записать следующим образом:
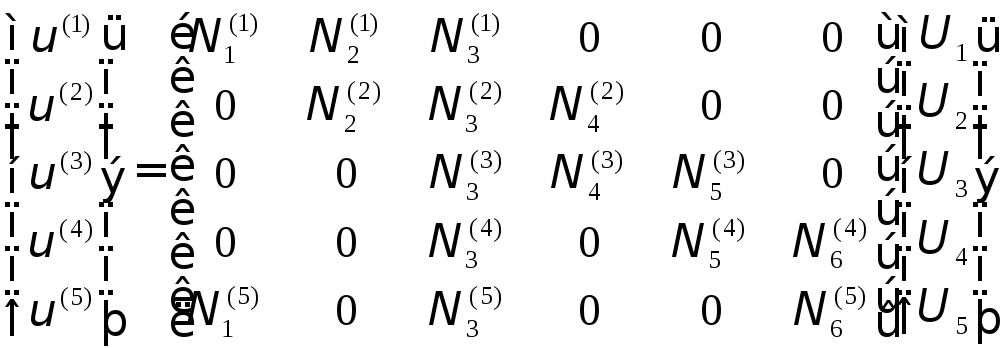 .
(2.46)
.
(2.46)
Сокращенная форма интерполяционных уравнений используется, когда осуществляется машинная реализация метода. Расширенная форма имеет некоторое преимущество, когда рассматривается процесс минимизации, который связан с дифференцированием матриц элементов.
2.7. Преобразование системы уравнений
Результирующая система уравнений имеет вид
![]() (2.47)
(2.47)
она получается суммированием уравнений для всех элементов. Эта система должна быть преобразована, если некоторые составляющие {T} известны, что является скорее правилом, чем исключением. В большинстве задач теории поля некоторые граничные значения искомой величины заданы; во всех задачах теории упругости должны быть фиксированы некоторые перемещения, с тем, чтобы исключить перемещение среды как жесткого тела. В задачах механики деформируемых сред матрица жесткости [K] будет сингулярной до тех пор, пока не заданы некоторые перемещения.
Цель этого раздела – обсуждение и иллюстрация процедуры преобразования [K] и {F} таким образом, чтобы получить правильный ответ, не изменяя размеры [K] и {F}, ибо это повлечет за собой трудности при программировании.
Если фиксирована одна степень свободы узлового параметра {T}. То преобразование системы уравнений представляет собой двухшаговую процедуру. Пусть, например, известно значение Т5; преобразование сводится только к следующему:
Все коэффициенты пятой строки, за исключением диагональных, приравниваются нулю. Диагональный член остается неизменным. В форме равенства это выглядит как
 при j=1,…,n и
при j=1,…,n и .
Соответствующая компонента F5 вектора
{F} заменяется на произведение:
.
Соответствующая компонента F5 вектора
{F} заменяется на произведение:
![]()
Все остальные уравнения преобразуются вычитанием произведения
![]()
из Fjи подстановкойKj5=0, j=1,…,n, j≠5.
Пример
Требуется преобразовать следующую систему уравнений, если известно, что Т1=150 иТ5= 40:
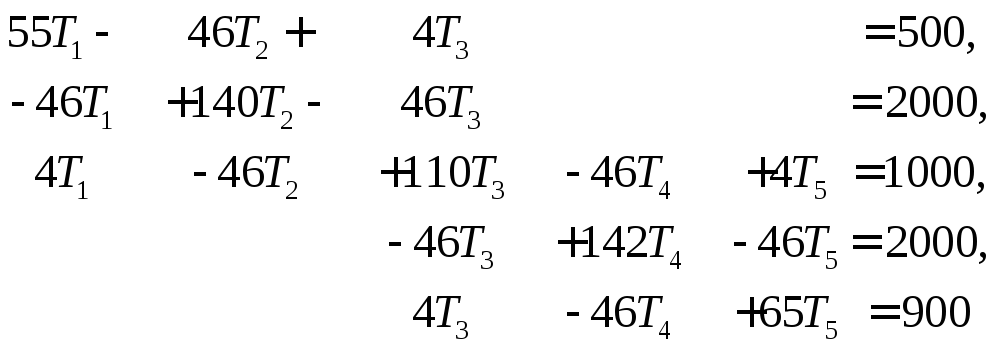
На первом этапе приравняем нулю все коэффициенты в первой и пятой строках, за исключением диагональных членов, которые оставим неизменными. Компоненты F1 и F5 в {F} заменим соответственно на K11T1 и K55T5. В результате будем иметь:
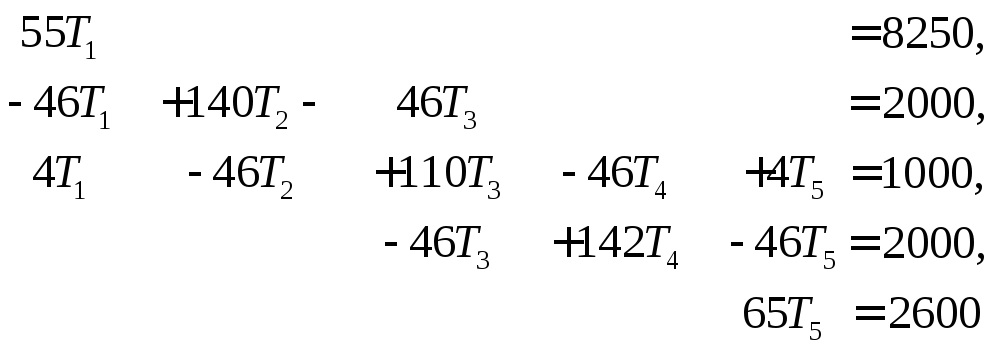
Второй этап состоит в исключении столбцов матрицы, коэффициенты которых умножаются на Т1иТ5. Это осуществляется переносом членов, содержащихТ1иТ5в правую часть системы. Например, величинаF2становится равной 2000+46Т1, или 8900. Завершая второй шаг, получим:

Описанная выше процедура совершенно проста и легко поддается программированию. Та же методика преобразования может быть использована также в случае, когда [K] хранится в виде прямоугольного массива. Логика программирования, однако, при этом более сложная.
Другой метод, применяемый некоторыми исследователями, состоит в том, что диагональный коэффициент, соответствующий заданному узловому значению Тβ, умножается на очень большое число, скажем на 1015, аFβзаменяется на (1015)Тβ. Это равносильно приближенной замене коэффициентов вне главной диагонали нулям. Такой способ очень легко реализовать на ЭВМ, но он неприменим, если значениеТβочень мало. Именно с таким случаем сталкиваются при решении задач механики твердого деформируемого тела, когда заданные перемещения малы по величине. Первый метод, рассмотренный выше, всегда будет давать правильные результаты там, где мы сталкиваемся с малыми заданными величинамиТβ.