

-
Композиция и коммутативность геометрических преобразований. Однородные координаты.
-
М1
М2
Перенос
Масштабирование
Поворот
Масштабирование (при Sx=Sy)
Перенос
Масштабирование
Поворот
Поворот
Хотелось бы преобразования представить в такой форме, чтобы все эти элементарные преобразования можно было бы представить в одной форме - в виде произведений матриц. Тогда удастся совместить все три вида преобразований в виде умножения на одну результирующую матрицу геометрических преобразований.
Это можно сделать, представив точки в однородных координатах. Однородные координаты были введены в геометрии.
|
Точка Р(х,у) записывается как P(Wx,Wy,W) для любого масштабного множителя W не равного нулю. Переход от однородных к декартовым координатам x=X/W y=Y/W. |
-
Видовой конвейер 2d. Преобразование координат
В двухмерном видовом конвейере используются декартовы системы координат, их три: Мировые координаты (World coordinate - WC). Координатная система пользователя. Используется прикладным программистом для описания графического ввода и вывода, ее размеры зависят от реальных размеров моделируемых объектов.Нормализованные координаты устройства (Normalize device coordinate - NDC). Независимая от устройств декартова система координат, приведенная к диапазону от 0 до 1. Используется для хранения данных, обеспечивает защиту от переполнения и потери точности.Координаты устройства (Device coordinate – DC).
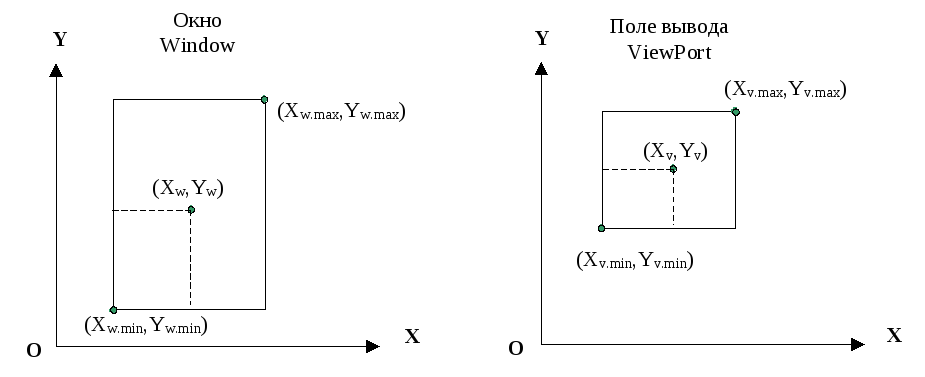 .
Определим, как найти в поле вывода точку,
соответствующую точке, заданной в окне.
Для этого используем простую пропорцию
.
Определим, как найти в поле вывода точку,
соответствующую точке, заданной в окне.
Для этого используем простую пропорцию
![]() откуда, выразим Х координату поля вывода
через Х координату окна
откуда, выразим Х координату поля вывода
через Х координату окна
![]()
в
этой формуле выражение
![]() можно
рассматривать как масштабирующий
коэффициент.
можно
рассматривать как масштабирующий
коэффициент.
![]()
![]()
![]() очевидно,
что
очевидно,
что
![]() формируют
простой перенос. Обозначив его как Тх,
приходим к конечной формуле
формируют
простой перенос. Обозначив его как Тх,
приходим к конечной формуле
![]() .
Проведя аналогичные рассуждения можно
получить формулу для координаты Y -
.
Проведя аналогичные рассуждения можно
получить формулу для координаты Y -
![]() .
.
И переходя к матричной форме
Pv=PwST=PwM
[x’
y’ 1] = [x y 1]

-
Плоские геометрические проекции. Ортографические проекции.
Определенный таким образом класс проекций известен под названием плоских геометрических проекций, поскольку проецирование в этом случае производится на плоскость, а не на искривленную поверхность и в качестве проекторов используются прямые, а не кривые линии
Плоские геометрические проекции можно подразделить на два основных класса: центральные и параллельные. Различие между ними определяется соотношением между центром проекции и проекционной плоскостью. Если расстояние между ними конечно, то проекция будет центральной (рис. 1), если же оно бесконечно, то проекция будет параллельной Параллельные проекции разделяются на два типа в зависимости от соотношения между направлением проецирования и нормалью к проекционной плоскости. В орто'графических параллельных проекциях эти направления совпадают, а в косоугольных параллельных проекциях они не совпадают. То есть в ортографических проекциях направление проецирования является нормалью к проекционной плоскости.Наиболее широко используемыми видами ортографических проекций являются вид спереди, вид сверху (план) и вид сбоку. В них картинная плоскость перпендикулярна главным координатным осям, совпадающим вследствие этого с направлением проецирования. Эти проекции часто применяются в инженерной графике для описания машиностроительных деталей, агрегатов и сооружений, так как по ним можно измерять расстояния и углы.

В случае аксонометрических ортографических проекций используются проекционные плоскости, не перпендикулярные главным координатным осям, поэтому на них изображаются сразу несколько сторон объекта, так же как и при центральном проецировании, однако в аксонометрии укорачивание постоянно, тогда как в случае центральной проекции оно связано с расстоянием от центра проекции. При аксонометрическом проецировании сохраняется параллельность прямых, а углы изменяются; расстояния же можно измерить вдоль каждой из главных координатных осей (в общем случае с различными масштабными коэффициентами).
Широко используемым видом аксонометрической проекции является изометрическая проекция. В ней нормаль к проекционной плоскости (а следовательно, и направление проецирования) составляет равные углы с каждой из главных координатных осей.
Изометрическая проекция обладает следующим свойством: все три главные координатные оси одинаково укорачиваются. Поэтому можно проводить измерения с одним и тем же масштабом (отсюда название: изо, что означает «равно», и метрия — «измерение»). Кроме того, главные координатные оси проецируются так, что их проекции составляют равные углы друг с другом .
-
Плоские геометрические проекции. Центральные проекции.
Центральная проекция любой совокупности параллельных прямых, которые не параллельны проекционной плоскости, будет сходиться в точке схода. Точек схода бесконечно много. Если совокупность прямых параллельна одной из главных координатных осей, то их точка схода называется главной точкой схода. Имеются только три такие точки, соответствующие пересечениям главных координатных осей с проекционной плоскостью. Центральные проекции классифицируются в зависимости от числа главных точек схода, которыми они обладают, а следовательно и от числа координатных осей, которые пересекают проекционную плоскость.