

4. Динамические характеристики
Переход системы из одного установившегося режима в другой с иными значениями входного и выходного сигналов называют динамическим режимом или переходным процессом. В динамическом режиме отношение выходного сигнала к входному может быть не равно коэффициенту преобразования. Поведение элемента или системы автоматики в переходном процессе может быть описано с помощью переходных характеристик. Переходной характеристикой называют зависимость выходного сигнала от времени y(t) при скачкообразном изменении входного сигнала. На рис. 3 показаны график изменения входного сигнала (а) и соответствующие ему графики (б, в, г) переходных характеристик наиболее распространенных элементов автоматики.
В
момент времени t0
входной
сигнал скачком изменяется от нуля до
х0
(рис.
3, а).
Если
элемент автоматики является безынерционным,
то в тот же момент времени t0
выходной
сигнал скачком изменяется от нуля до
![]() (рис.3,б).
Как
правило, электромеханические элементы
обладают инерционностью, которая тем
больше, чем больше масса подвижных
частей или индуктивность обмотки. В
этом случае изменение выходного сигнала
запаздывает по сравнению с изменением
входного (рис.3, в).
Переходная
характеристика имеет вид экспоненты,
т. е. кривой, стремящейся от нуля к
значению у0
=
К
х0
со
скоростью, пропорциональной в каждый
момент времени разности между у0
и
текущим значением выходного сигнала.
Инерционность переходного процесса
характеризуется значением постоянной
времени Т,
выражаемой
в секундах. На графике величину Т
можно
определить, проведя касательную к кривой
y(t)
при
t=t0
и продолжив ее до пересечения с
горизонтальной линией у0
=
К
х0.
За
время, равное T,
выходной сигнал достигает 63 % своего
нового установившегося значения.
(рис.3,б).
Как
правило, электромеханические элементы
обладают инерционностью, которая тем
больше, чем больше масса подвижных
частей или индуктивность обмотки. В
этом случае изменение выходного сигнала
запаздывает по сравнению с изменением
входного (рис.3, в).
Переходная
характеристика имеет вид экспоненты,
т. е. кривой, стремящейся от нуля к
значению у0
=
К
х0
со
скоростью, пропорциональной в каждый
момент времени разности между у0
и
текущим значением выходного сигнала.
Инерционность переходного процесса
характеризуется значением постоянной
времени Т,
выражаемой
в секундах. На графике величину Т
можно
определить, проведя касательную к кривой
y(t)
при
t=t0
и продолжив ее до пересечения с
горизонтальной линией у0
=
К
х0.
За
время, равное T,
выходной сигнал достигает 63 % своего
нового установившегося значения.
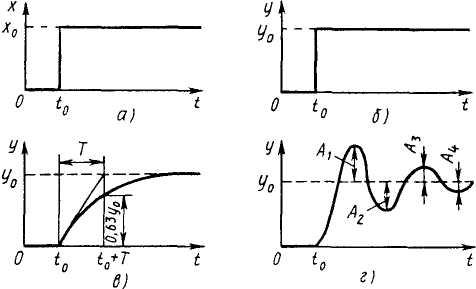
Рис. 3. Переходные характеристики элементов автоматики
Уравнение переходной характеристики имеет следующий вид:
![]()
где е = 2,718 — основание натурального логарифма.
Обычно
на практике считают, что за время
![]() выходной сигнал достигает нового
установившегося значения у0.
На
самом деле за это время выходной сигнал
достигает значений соответственно
95—99 % у0.
Разницу
между значениями выходного сигнала в
динамическом и установившемся режимах
называют динамической
погрешностью.
Для ее уменьшения стремятся снизить
постоянную времени, например делая
более легкими подвижные части элементов
автоматики.
выходной сигнал достигает нового
установившегося значения у0.
На
самом деле за это время выходной сигнал
достигает значений соответственно
95—99 % у0.
Разницу
между значениями выходного сигнала в
динамическом и установившемся режимах
называют динамической
погрешностью.
Для ее уменьшения стремятся снизить
постоянную времени, например делая
более легкими подвижные части элементов
автоматики.
Во
время переходного процесса могут
возникнуть и колебания выходного
сигнала. В электрических цепях это
обычно связано с процессом обмена
энергией между элементами колебательного
контура: индуктивностью и емкостью. В
механических узлах элементов автоматики
колебания возникают обычно в тех случаях,
когда одновременно действуют и силы
инерции, и силы упругости (например, в
пружинах). График колебательного
затухающего переходного процесса
показан на рис. 3, г.
Как
видно из этого графика, изменение
выходного сигнала происходит относительно
значения у0.
Амплитуда
этих колебаний постепенно уменьшается,
затухает. Для количественной оценки
этого процесса вводят понятие коэффициента
затухания
![]() ,
который определяют по формуле
,
который определяют по формуле
![]() ,
где
,
где![]() и
и![]() — соседние амплитуды колебаний выходного
сигнала в одну сторону (т. е. одного
знака).
— соседние амплитуды колебаний выходного
сигнала в одну сторону (т. е. одного
знака).
При
незатухающем колебательном процессе
![]() и коэффициент затухания
и коэффициент затухания![]() = 0. Система автоматики является при этом
неустойчивой. Если же коэффициент
затухания стремится к единице, то
переходный процесс будет апериодическим
(рис. 3,в).
= 0. Система автоматики является при этом
неустойчивой. Если же коэффициент
затухания стремится к единице, то
переходный процесс будет апериодическим
(рис. 3,в).