

Порядок включения вентилей в одноканальных синхронных микропроцессорных фсу
|
ССФ |
n = 0 |
n = 1 |
n = 2 |
|
5 |
V1 |
V6 |
V5 |
|
1 |
V2 |
V1 |
V6 |
|
3 |
V3 |
V2 |
V1 |
|
2 |
V4 |
V3 |
V2 |
|
6 |
V5 |
V4 |
V3 |
|
4 |
V6 |
V5 |
V4 |
Замечание. Предполагается, что ток нагрузки Id непрерывный, угол коммутации мал и им можно пренебречь.
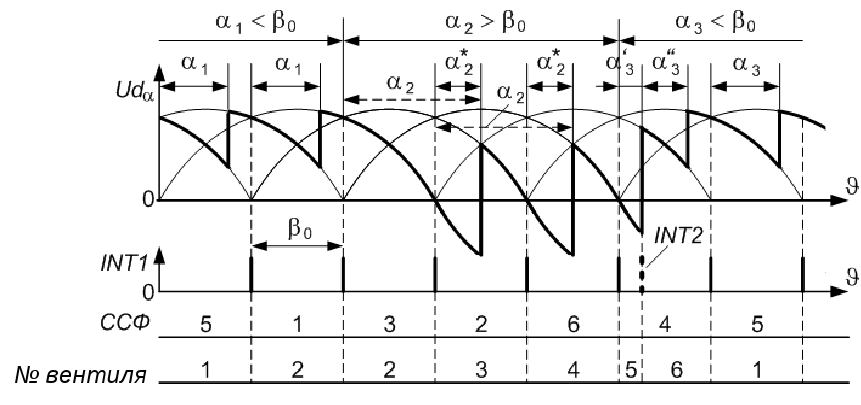
Рис. 2.9
Как показано на рисунке, в первом подынтервале, для которого n = 0, при ССФ = 5 включается вентиль V1, при ССФ = 1 – вентиль V2. Далее начинается второй подынтервал, для которого n = 1. Из рисунка, в частности, видно, как углы 2, относящиеся к соседним зонам, перекрывают друг друга (штриховые двунаправленные стрелки). Первое на данном подынтервале ССФ = 3, для него и для n = 1 (табл. 2.3) необходимо включить V2, но он уже включен. Чтобы не нарушать алгоритм работы (программное обеспечение) микропроцессорного ФСУ, необходимо просто подтвердить его включение. Далее, в соответствии с алгоритмом работы управляемого выпрямителя включаются V3 и V4.
Таким образом, увеличение угла управления с переходом в следующую зону особых сложностей не вызывает. Неприятности начинаются при переходе к третьему подынтервалу, когда угол управления уменьшается с переходом в другой диапазон (n = 0). Для нового интервала повторения ССФ = 4. Для него и для n = 0 (табл. 2.3) необходимо включить V6, но при этом нарушается очередность включения вентилей (по порядку должен быть включен V5). Нарушение последовательности включения вентилей может привести к аварийным режимам, вызванным опрокидыванием или прорывом преобразователя в инверторном режиме [5].
Для
выполнения всех требований, налагаемых
на процесс управления преобразователем,
на данном интервале повторения производят
последовательное включение двух
вентилей. С этой целью угол управления
3
разбивается
на две составляющие –
![]() и
и![]() .
Далее процедура работы программного
обеспечения, например, может быть такой.
В подпрограмме по ТЕК (т. е. синхронно,
по сигналуINT1)
в ПТ заносятся код угла
.
Далее процедура работы программного
обеспечения, например, может быть такой.
В подпрограмме по ТЕК (т. е. синхронно,
по сигналуINT1)
в ПТ заносятся код угла
![]() ,
информация о включенииV5
и также разрешается прерывание от этого
ПТ. После отработки таймером первой
составляющей он включает вентиль V5
и формирует запрос на прерывание (сигнал
INT2,
на рис. 2.9 показан жирным пунктиром). По
данному запросу микропроцессор переходит
на соответствующую подпрограмму, в
которой заносит в таймер код второй
составляющей угла –
,
информация о включенииV5
и также разрешается прерывание от этого
ПТ. После отработки таймером первой
составляющей он включает вентиль V5
и формирует запрос на прерывание (сигнал
INT2,
на рис. 2.9 показан жирным пунктиром). По
данному запросу микропроцессор переходит
на соответствующую подпрограмму, в
которой заносит в таймер код второй
составляющей угла –
![]() ,
информацию о включении вентиляV6
и запрещает прерывание от ПТ. После
отработки таймером второй составляющей
автоматически формируется импульс
управления вентилем V6.
На следующем интервале повторения в
соответствии с алгоритмом работы УВ
включается V1
и т. д.
,
информацию о включении вентиляV6
и запрещает прерывание от ПТ. После
отработки таймером второй составляющей
автоматически формируется импульс
управления вентилем V6.
На следующем интервале повторения в
соответствии с алгоритмом работы УВ
включается V1
и т. д.
Таким образом, «скользким» моментом здесь является переход из одной зоны в другую при уменьшении угла управления. В одноканальных синхронных микропроцессорных ФСУ он требует дополнительных программных и аппаратных средств, а также некоторой смены алгоритма работы. В частности, при увеличении коммутация вентиля с одного из интервалов повторения переносится на следующий интервал повторения, а при уменьшении угла управления на одном интервале повторения необходимо последовательно включить два тиристора.
При большем переходе (например, при переходе угла управления из зоны с n = 0 в зону с n = 2 или обратно) процессы в управлении и в работе управляемого выпрямителя различаются только количественно: при увеличении один и тот же тиристор необходимо включить на трех последовательных интервалах повторения, а при уменьшении на одном интервале повторения необходимо будет последовательно включить три вентиля. Последнее, в частности, обеспечивает предельное быстродействие управляемого выпрямителя.
Следует
также отметить, что при уменьшении
соответственно уменьшается и время
работы тиристоров (в нашем случае
тиристоров V4
и V5),
т.е. время между включениями очередных
тиристоров (см. интервал
![]() на рис. 2.9). Оно всегда должно быть больше
продолжительности угла коммутации
(который на эпюрах не отражен), иначе в
схеме может возникнуть ситуация, когда
одновременно происходит коммутация
вентилей и в анодной, и в катодной
группах. Это может привести к возникновению
эффекта нулевого вентиля и, соответственно,
к искажению формы выходного напряжения
преобразователя.
на рис. 2.9). Оно всегда должно быть больше
продолжительности угла коммутации
(который на эпюрах не отражен), иначе в
схеме может возникнуть ситуация, когда
одновременно происходит коммутация
вентилей и в анодной, и в катодной
группах. Это может привести к возникновению
эффекта нулевого вентиля и, соответственно,
к искажению формы выходного напряжения
преобразователя.
Все сказанное выше позволяет сделать следующие выводы. Во-первых, в одноканальных синхронных микропроцессорных ФСУ в принципе реализуется весь диапазон изменения угла регулирования. Во-вторых, эта реализация, впрочем, как и реализация любого другого варианта микропроцессорных ФСУ, требует учета многих особенностей работы УВ: работы в выпрямительном и инверторном режимах, работы в статике и в динамике. Они должны быть учтены при проектировании аппаратных средств МПСУ и, в первую очередь, программного обеспечения, вопросам построения которого посвящен следующий раздел.