

2.3.6. Способы организации момента отсчета временного интервала
По этому классификационному признаку микропроцессорные ФСУ делятся на синхронные и асинхронные. Рассмотрим по отдельности эти два типа.
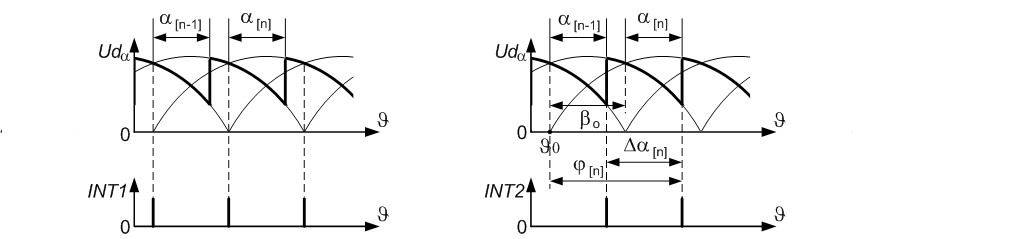
Синхронные (или неавтономные) микропроцессорные ФСУ по умолчанию рассматривались нами выше, и их признаки уже известны. Но все-таки их необходимо зафиксировать и далее провести по ним сравнение с асинхронными системами. В синхронных устройствах момент отсчета угла управления , или временного интервала t, производится от точек естественной коммутации. Чтобы обеспечить точную привязку к этим точкам, в МПСУ используется режим прерывания, который инициируется, как было показано выше, блоком синхронизации с сетью, формирующим сигналы запроса на прерывание INT1, совпадающие по времени с ТЕК (рис. 2.7, а). По этим сигналам микропроцессор заканчивает текущую команду и по специальной процедуре переходит на подпрограмму обслуживания запроса на прерывание. В данной подпрограмме его главной задачей является засылка в ПТ кода длительности нового временного интервала (N) и запуск его на счет. После завершения подпрограммы микропроцессор продолжает выполнять прерванную головную программу. Вопрос формирования импульсов управления (после отработки таймером интервала t) пока опускаем.
а б
Рис. 2.7
Можно сказать, что синхронное микропроцессорное ФСУ – это жесткая конструкция, четко привязанная к сетевому напряжению, поэтому ее еще называют неавтономной. К ее основным достоинствам относят, во-первых, возможность функционирования как в разомкнутом, так и в замкнутом режиме и, во-вторых, постоянство времени, предоставляемого на расчет следующего значения N. Оно определяется силовой схемой, частотой сети и равно интервалу повторения. В качестве примера для частоты сети, равной 50 Гц, величина интервала повторения (ИП) (в градусном и временном выражении) для разной эквивалентной фазности УВ приведена в табл. 2.1.
Т а б л и ц а 2.1
Величина интервала повторения для различных схем выпрямителей
|
Силовая схема |
0, эл. град. |
Тип, мс |
|
mэ = 2 |
180 |
10,0 |
|
mэ = 3 |
120 |
6,66 |
|
mэ = 6 |
60 |
3,33 |
В качестве недостатка синхронных микропроцессорных ФСУ можно указать сложность реализации одноканального варианта при > 60 эл. град.. Этот вопрос подробно будет рассматриваться в п. 2.3.8.
В асинхронных (или автономных) микропроцессорных ФСУ момент отсчета временного интервала, определяющего включение очередного вентиля, задается моментом включения предыдущего, согласно очередности их включения, вентиля. Таким образом, в асинхронных микропроцессорных ФСУ формируется временной интервал между коммутациями соседних вентилей. Принцип его формирования для асинхронных МП ФСУ показан на рис. 2.7, б. Здесь введены следующие обозначения:
[n–1] – угол включения вентиля на [n–1]-м ИП;
[n] – угол включения вентиля на [n]-м ИП;
[n] – интервал между включением вентилей на [n]- и [n–1]-м интервалах повторения;
[n] – угол включения вентиля на [n]-м ИП, отсчитываемый от начала предыдущего ИП, т.е. от точки 0.
Интервал повторения в радианах вычисляется по формуле
0= 2/mэ.
Из рисунка можно вывести следующие очевидные соотношения:
[n] = 0 + [n],
[n] = [n] – [n–1] = 0 + [n] – [n–1]. (2.2)
Следовательно, зная предыдущее и последующее значения углов управления, можно определить интервал между включением предыдущего и следующего вентилей, что и требуется для асинхронного управления УВ. Этот интервал также должен формироваться программируемым таймером. Но, чтобы занести в него очередное значение, микропроцессор должен знать, когда закончилось формирование предыдущего интервала [n–1], это лучше всего реализуется запросом на прерывание от самого ПТ (на рис. 2.2 этот сигнал обозначен как INT2). По этому запросу микропроцессор переходит на выполнение соответствующей подпрограммы, в которой также главной задачей микропроцессора является засылка в программируемый таймер информации и запуск его на счет. Отличие заключается только в характере входной информации: она задает величину не угла , а интервала .
Из выражения (2.2), в частности, видно, что в установившемся режиме, когда [n] = [n–1], интервал будет равен 0. Кстати, то же самое имеет место и в синхронных микропроцессорных ФСУ.
Важным достоинством асинхронных микропроцессорных ФСУ является простота реализации одноканального варианта. Как и работа управляемого выпрямителя представляет собой ряд последовательных коммутаций вентилей, так и асинхронное микропроцессорное ФСУ формирует последовательный ряд межкоммутационных интервалов. Причем, согласно выражению для , принцип формирования моментов коммутации не зависит от величины угла управления. Следовательно, алгоритм работы во всем диапазоне изменения угла будет один и тот же. Это, соответственно, упрощает программное обеспечение по сравнению с синхронным одноканальным вариантом.
Следует упомянуть еще одно достоинство асинхронных ФСУ, не связанное прямо с микропроцессорной реализацией. Асинхронные системы импульсно-фазового управления изначально [23] были разработаны с целью исключения влияния искажений сетевого напряжения на работу системы управления УВ. «Привязавшись» один раз к сети, асинхронные системы управления УВ далее за счет обратной связи по току или напряжению работают автономно. Таким образом, асинхронные микропроцессорные ФСУ могут устойчиво работать при наличии искажений в сети.
К недостаткам можно отнести следующее.
Работа асинхронных микропроцессорных ФСУ возможна только в системах с обратной связью. Иначе в силу неточного соответствия временных параметров сетевого напряжения и временных параметров формируемых МПСУ углов управления выходное напряжение будет «плыть» в сторону увеличения или уменьшения выходного напряжения (как сигнал на экране осциллографа с несинхронизированной разверткой). Несоответствие, в частности, может возникнуть из-за отклонения частоты питающей сети от 50 Гц и ограниченной разрядности программируемого таймера.
В текущем режиме асинхронное микропроцессорное ФСУ работает без синхронизации с сетью. Распределение импульсов управления между вентилями происходит согласно алгоритму работы управляемого выпрямителя. Но первое включение с целью правильного распределения импульсов управления должно быть «привязано» к сети. Таким образом, и в МПСУ подобного типа должен быть БСС (может быть, более простой).
Асинхронный режим работы требует наличия запроса на прерывание как от БСС (для первого включения), так и от программируемого таймера, что усложняет в определенной степени и аппаратуру, и программное обеспечение.
В установившемся режиме время, предоставляемое на расчет алгоритма управления (или время между коммутациями), постоянно, равно 0 и не зависит от угла управления. Но в динамике, когда последующие углы управления могут быть как больше, так и меньше предыдущих, соответственно будет меняться и время между коммутациями, т. е. время, предоставляемое на расчет алгоритма.
На этом недостатке остановимся подробнее. Особенно тяжелым случаем является динамический процесс, когда угол управления уменьшается, соответственно уменьшается и . Данное обстоятельство может привести к тому, что для расчета новых данных управления просто не хватит времени. Чтобы этого не произошло, в асинхронных микропроцессорных ФСУ скачок угла управления в сторону уменьшения ограничивают путем задания величины min. Эта величина выбирается из условия гарантированного расчета микропроцессором новых данных для управления. В этом случае «недобор» по углу переходит на следующие интервалы повторения, что, несомненно, ухудшает динамику системы регулирования в целом.
Таким образом, и синхронные и асинхронные микропроцессорные ФСУ имеют достоинства и недостатки. Выбор того или иного вида определяется многими факторами: возможностями микроконтроллера, силовой схемой управляемого выпрямителя, электромагнитной совместимостью с конкретной сетью, требованиями к системе (например, к электроприводу) в целом, особенностями ее работы и т. д. В табл. 2.2 приведены для наглядного сравнения характеристики обоих видов микропроцессорных ФСУ.
Т а б л и ц а 2.2