

mo_in_exercises
.pdf∂2Q(x) |
0 |
1 1 |
|
||
∂v2 |
= vT 2xxQ v = (1;1) |
1 |
0 |
1 = 2 |
> 0. |
|
|
|
|
|
|
Отсюда и из квадратичного вида функции Q(x) следует существование
конечного минимума в задаче, поскольку на бесконечности функция будет возрастать равномерно по параметру c .
Исследуем границу x3 − x1 =1. Система условий Куна-Таккера примет
вид:
− x3 = −λ1, x3 − x1 =1
− x1 = λ1, λ ≥ 0,
где λ1– множитель Лагранжа. Они выполняются при x1 = −0.5, x3 = 0.5, λ1 = 0.5. Значение функции равно −0.25 (точка A на рис. 3.4).
Исследуем границу x1 − x3 = 2 . Для нее имеем следующую систему необходимых условий локального минимума:
− x3 = λ1, x1 − x3 = 2
− x1 = −λ1, λ ≥ 0.
Они выполняются при x1 = +1, x3 = −1, λ1 =1 (точка B на рис. 3.4).
Значение функции равно −1, т.е. меньше, чем в первой найденной точке. Следовательно, глобальный минимум вспомогательной задачи достигается в
точке x1 =1, x3 = −1, а для исходной задачи — в точке x1 =1, x2 = 3,
x3 = −1.
Рис. 3.4. Структура задачи на линейном многообразии, порожденном ограничениемравенством (стрелками показаны направления возрастания функции)
Дополнительный материал и задачи по данному разделу можно найти в литературе [5, 8-16].
41

3.2. Контрольные задания |
|
|
|
|
|
|
|
|
|||||||
1. Используя теорему Лагранжа, определить глобальный минимум в |
|||||||||||||||
задачах: (a) min{x |
2 |
− x3 |
3 : x2 + x2 |
=1}; |
(b) min{x2 |
+(x −1)2 +x : x D}, |
|||||||||
|
|
1 |
1 |
|
2 |
|
|
|
|
1 |
2 |
|
|
3 |
|
где D ={x R3 : x − x + x = 0, x2 |
+ x −2x +2x |
= 0, x − x |
= 0}. |
||||||||||||
|
1 |
|
2 |
3 |
|
1 |
1 |
2 |
3 |
|
1 |
2 |
|
|
|
2. Для задачи |
|
min {10(x −3.5)2 + 20(x |
− 4)2 : x D} |
||||||||||||
D ={x R2 : x + x |
|
|
x −x |
|
|
1 |
2x + x |
2 |
0,5x −x |
|
|
||||
|
≤6; |
2 |
≤1; |
≥6; |
|
2 |
≥ −4}. |
||||||||
1 |
2 |
|
1 |
|
|
1 |
2 |
|
|
1 |
|
|
|||
Начертите на плоскости |
(x1, x2 ) вид |
области |
D . |
В ее |
угловых точках |
||||||||||
постройте внешние нормали к границам, а также вектор − Q(x) . Используя
геометрическую трактовку условий Куна-Таккера, ответьте на вопрос: может ли точка глобального минимума располагаться в одной из вершин? На основе полученных результатов сделайте выводы о возможном положении точки условного минимума. Проверьте Ваши предположения с помощью теоремы Куна-Таккера, найдите решение.
3. Используя геометрические представления, укажите точку минимума в
задаче min{x2 : x12 + x22 ≤1; − x1 + x22 ≤ 0; x1 + x2 ≥ 0}.
Обоснуйте полученные результаты с помощью условий Куна-Таккера.
4. Проверьте выполнение условий Куна-Таккера в точках (0;2), (0;0),
( 2;0), (1;0), (0.05;0) для задачи: min {10x12 +5x22 − x1 + 2x2 −10 : x D},
2;0), (1;0), (0.05;0) для задачи: min {10x12 +5x22 − x1 + 2x2 −10 : x D},
D ={x R2 : 2x21 + x22 ≤ 4; |
x + x |
2 |
≤ 4; x |
≥ 0; x |
2 |
≥ 0}. |
|
||||||
|
|
|
1 |
|
|
1 |
|
|
|
|
|||
5. Найдите расстояние от начала координат до выпуклого множества |
|||||||||||||
D ={x R2 : x12 − x22 ≥ 4; x1 ≥ 0}. |
Обоснуйте |
результат |
с |
использованием |
|||||||||
теоремы Куна-Таккера. |
|
|
|
|
|
|
|
|
y |
|
|
||
6. Найдите |
проекцию |
произвольной |
|
точки |
|
на |
множество |
||||||
D ={x R2 : x + x |
2 |
≥ 4; 2x + x |
2 |
≥ 5}. Дайте |
геометрическую |
трактовку |
|||||||
1 |
1 |
|
|
|
|
|
|
|
|
|
|
||
условиям неотрицательности множителей Лагранжа.
Указание: Решите задачу, рассмотрев четыре возможных случая относительно множества I ( y) , содержащего номера неравенств, на границе которых находится проекция точки y : I ( y) = ,{1},{2},{1, 2}.
7. Найдите проекцию |
произвольной |
точки |
x Rn на следующие |
||||||
|
|
|
) ; |
|
|
||||
множества: |
(a) параллелепипед ai ≤ xi ≤ bi , (i =1, n |
|
|
||||||
(b) шар ∑n |
(x |
−c )2 ≤ r2 ; |
(c) конус x2 |
≥ ∑n−1x2; x |
n |
≥ 0 . |
|||
i=1 |
i |
i |
n |
i=1 |
i |
|
|||
42

|
8. Найдите минимум функции |
6x2 + x2 - 2x x |
+ 9x |
- 3x + x2 |
- x |
||||||||||
|
|
|
|
|
|
|
1 |
2 |
1 |
2 |
1 |
|
2 |
3 |
3 |
при ограничениях x1 - x2 |
≥ - 3, |
- x1 |
+ 5x2 ≥ 15, |
0 ≤ x1 ≤ 5. |
|
|
|||||||||
|
Как |
изменится |
решение, |
если |
добавить |
|
ограничение-равенство |
||||||||
x1 + x3 =1? Как изменится решение, |
если |
кроме |
ограничения-равенства |
||||||||||||
добавить еще одно дополнительное неравенство: 10 x2 ≤ x1 −1? |
|
|
|
||||||||||||
|
9. |
Проверьте выпуклость |
и |
регулярность |
области |
D ={(x1, x2 ) : |
|||||||||
0 ≤ x |
2 |
≤ x3}. Найдите решение задачи: min{x2 |
+ x2 |
+ 4x −2x |
2 |
: x D}. |
|
||||||||
|
|
1 |
|
|
|
1 |
2 |
|
|
1 |
|
|
|
||
Указание: если предположить, что активно одно ограничение x2 ≤ x13 , то
может возникнуть проблема с аналитическим определением значения множителя Лагранжа. Попробуйте оценить его знак без явного вычисления.
10. На классе гладких задач исследовать область D на регулярность,
используя достаточные условия и определение регулярности области в точке. |
||||||||
D = {x R2 : x2 |
+ (x |
2 |
− 2) |
2 ≤ 4, x2 |
+ (x |
2 |
−1) |
2 ≥1, x ≤ 0}. Изменятся ли |
1 |
|
|
1 |
|
|
1 |
||
Ваши выводы, если из описания области D исключить последнее неравенство
x1 ≤ 0 ?
11. Найдите решения следующих задач:
max{2 |
x + |
x |
2 |
: x + x |
2 |
≤1, x |
|
|
≥ 0, x |
2 |
≥ 0}; |
|
|
|
|||||||||||
|
|
|
|
1 |
|
|
1 |
|
|
|
|
|
1 |
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
___ |
|
|
|
max{2 x1 + |
|
x2 +3 |
x3 : x1 + x2 + x3 ≤1, xi |
≥ 0 (i = 1,3)}; |
|
||||||||||||||||||||
|
x1 +... +αn |
|
xn : x1 +... + xn |
|
|
|
|
|
|
|
___ |
|
|
|
|||||||||||
max α1 |
|
≤1, xi ≥ 0 (i =1, n) , |
|
||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
где α1 > 0, ... , αn > 0. |
|
|
|
|
|
|
x2 |
|
|
|
|
|
|
+ 2x2 |
|
|
|
|
|
+ x2 |
|
||||
12. Найдите минимум функции |
− x x |
2 |
|
− 4x |
− 5x |
2 |
при |
||||||||||||||||||
|
|
|
|
|
|
|
|
|
1 |
|
1 |
|
|
|
|
2 |
|
|
1 |
|
3 |
|
|||
ограничениях x + 2x |
2 |
+ x2 ≤ 6, x ≤ 2, x |
≥ 0, x |
2 |
≥ 0. |
|
|
|
|
|
|
|
|||||||||||||
1 |
|
|
3 |
|
|
|
1 |
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
13. Решите задачу min{3x12 +2x22+6x32 −2x1x2 −4x2x3 −13x1 −22x3 −10} |
|||||||||||||||||||||||||
при ограничениях |
x2 |
+ x2 |
+ x2 |
≤ 2, x4 |
+ 2x |
2 |
|
+ x ≤ 3, 4x |
+ 6x |
2 |
+ x |
≤ 5, |
|||||||||||||
|
|
1 |
|
2 |
|
3 |
|
1 |
|
|
|
|
|
|
|
3 |
|
|
1 |
|
3 |
|
|||
x1 − 2x3 = −1, x3 ≥ 0. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
14. Найдите |
минимум |
функции |
x |
2 |
+ x |
2 |
|
− 10 x |
− 8 x |
2 |
в пространстве |
||||||||||||||
|
|
|
|
|
|
|
|
|
1 |
|
2 |
|
|
|
|
1 |
|
|
|
|
|
|
|||
переменных x1, x2 , x3 |
при |
|
ограничениях |
|
|
|
|
x1 ≥ 0 , |
|
x2 ≥ 0 , |
x3 ≥ 0 , |
||||||||||||||
2x1 + x2 + x3 = 6. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
43
15. На допустимом множестве, заданном следующими ограничениями:
3 + x1 − x3 ≥ 0, 0 ≤ x1 ≤ 2, 15 + x1 ≤ 5x3 , 2x1 + x2 = 2. Решите задачу
определения минимума функции 24x12 + x22 + 4x32 −8x1x3 −12x3 +36x1 − x2 .
16. Найдите глобальный минимум в задаче
min{5x2 |
+9x2 |
+5x2 |
−6x x |
2 |
−6x |
2 |
x |
3 |
+ 2x x |
3 |
: x D} |
|||||||||||
1 |
2 |
|
|
3 |
1 |
|
|
|
|
|
|
1 |
|
|
|
|
||||||
D ={x R3 : 4x + 4x |
2 |
≥1, x + x |
2 |
+ x |
|
|
|
≥1, 2x + 2x |
2 |
− x =1}. |
||||||||||||
|
1 |
|
|
1 |
|
|
3 |
|
|
|
|
|
1 |
|
|
|
3 |
|||||
17. Найдите |
min{x2 |
+ 0.5x2 |
+ 0.5x |
2 |
− x x |
−7x + x |
−5x } при |
|||||||||||||||
|
|
1 |
|
2 |
|
|
|
3 |
|
|
|
1 |
3 |
|
|
1 |
|
3 |
2 |
|||
ограничениях x3 −0.5x1 ≤1, − x1 +5x3 ≥10, |
5 ≤ x1 ≤8, x1 + x2 =1. |
|||||||||||||||||||||
18. С использованием теоремы Куна-Таккера докажите, что из всех треугольников с общим углом при вершине и заданной суммой длин боковых сторон равнобедренный треугольник имеет наименьшее основание.
19. В углах прямоугольной заготовки с размерами A на B вырезают квадраты с размерами x на x . Из оставшейся части собирают коробку. Определите значение x , при котором объем коробки максимален.
20. Найдите разложение положительного числа R на N вещественных сомножителей так, чтобы их сумма была минимальной.
21. Рассмотрите задачу о ритмичности производства (задачу № 11 из раздела 1), предполагая, что сырье не является штучным, т.е. значения xi не целочисленны. Решите задачу при следующих значениях параметров: N = 5,
E0 = 5, E = 5, A = 20 , P1 = 6 , P2 = 5 , P3 = 3, P4 =1, P5 = 4 ; а также при
N = 5, E0 =1, E = 3, A =15, P1 =1, P2 =1, P3 = 5 , P4 = 5 , P5 = 4 .
22. Найдите глобальные минимумы в задаче:
|
|
|
min{3x2 |
+ 2x x |
2 |
+ 3x2 |
+ 4x − 4x |
2 |
: x D} |
|
|
||||||||||||
|
|
|
|
|
|
1 |
|
|
1 |
|
|
|
2 |
1 |
|
|
|
|
|
|
|
||
|
|
D ={x R2 : (x1 +1) |
2 |
+(x2 −1)2 ≥1, x1 ≥ −2, x2 ≥ 0}. |
|
||||||||||||||||||
|
23. |
Решите |
задачу |
|
определения |
глобальных |
|
минимумов |
функции |
||||||||||||||
x2 |
+ x2 |
− 2x x |
при |
следующих |
ограничениях: |
|
1 − x |
≤ x |
≤ 2 − x , |
||||||||||||||
1 |
2 |
1 |
3 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1 |
3 |
1 |
x1 = x2 − x3. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
24. Найдите глобальный минимум в задаче: min{x12 +2x2 x3 − x3 : x D} |
||||||||||||||||||||||
D ={x R4 : x + x |
4 |
= 4, x |
2 |
+ x |
3 |
=8, |
x |
≥ 0, x |
2 |
≥ 0, x |
3 |
≥ 0}. Обоснуйте его |
|||||||||||
|
|
|
1 |
|
|
|
|
|
1 |
|
|
|
|
|
|
|
|||||||
единственность.
44
25. Найдите глобальный минимум функции x2 |
−x x −x2 +x x на D : |
|||||||||||||||
|
|
|
|
|
|
|
|
|
|
1 |
1 |
3 |
3 |
|
2 |
3 |
D ={x R3 : x ≥0; 2x +x ≥1; x +x ≥0; 2x +x ≤3; x −x −x =0}. |
||||||||||||||||
1 |
|
|
1 |
|
3 |
1 |
2 |
|
1 |
2 |
|
3 |
1 |
|
2 |
|
26. Обосновать существование глобального минимума и найти его в |
||||||||||||||||
задаче min{3x2 |
+3x2 |
+2x x |
−10x |
−14x : x D}, где допустимое множество |
||||||||||||
2 |
3 |
|
1 |
2 |
2 |
|
|
3 |
|
|
|
|
|
+ x =1}. |
||
D = {x R3 : x ≤ x2 |
, 2x |
2 |
− x ≤1, 2x |
2 |
+ x ≥ −1, x ≤ 2, x + x |
2 |
||||||||||
|
3 |
2 |
|
|
3 |
|
3 |
|
1 |
1 |
|
|
3 |
|||
27. Найти глобальный минимум, обосновав его существование, в задаче:
min{− x1x3 + x2 x3 − x32 + x3 + x22 : x D},
D = {x R3 : 2x2 ≤ x1 +1, x3 ≤ 2x2 +1, 2x2 − x1 ≥ −2, x1 − 2x2 + x3 =1}.
45

4. Вычислительные методы математического программирования
4.1. Основные понятия
Вычислительным методам решения задач математического программирования посвящена обширная литература [8-11, 13, 17, 18, 19].
Вобщем случае задача математического программирования представима
ввиде:
min{Q(x) : x D}, |
(4.1) |
D = {x E Rn : gi (x) ≤ 0, i =1,K, N , h j (x) = 0, |
j =1,K, M }, (4.2) |
где E - множество простой геометрической структуры, например, E = Rn или E = {x : ai ≤ xi ≤ bi , i =1,K, n}. Постановка (4.1)-(4.2) зависит от набора
функций, представимого вектор-функцией f = (Q, g1,K, gN , h1,K, hM ). Вычислительный метод должен строить для задачи (4.1)-(4.2) оценку
решения ek (интервальную или точечную) по координатам или по значению
функции, проводя испытания функций f в точках x0 , x1,K, xk . |
Результат |
|||
испытания |
Jk = J (xk , f ) включает значение функции fk = f (xk ) , а также |
|||
может включать значение ее частных производных до порядка |
p |
(обычно |
||
p =1 или |
p = 2 ). Значение p называют порядком испытания, |
например, |
||
результат испытания первого порядка имеет вид |
Jk = ( fk , fk ) , а второго – |
|||
Jk = ( fk , fk , 2 fk ) . Результаты испытаний, |
проведенных за |
k |
шагов, |
|
образуют множество поисковой информации ωk ={(xs , Js ) : s =1,K, k}.
Вычислительный метод α (или алгоритм) решения задачи (4.1)-(4.2)
строится исходя из имеющейся априорной информации о свойствах функций f и представляет набор правил α = Pk (ωk ), Ek (ωk ), M k (ωk ) , k = 0,1,K
Они определяют выбор точки следующего испытания xk +1 = P (ω |
k |
) , текущую |
|
k |
|
|
|
оценку решения ek = Ek (ωk ) , признак останова поиска |
μk = M k (ωk ) |
||
( μk = 0 - нет останова, μk =1 - останов).
Одним из принципов построения методов оптимизации является принцип наилучшего гарантированного результата. Он может быть использован, если
для класса решаемых задач Φ ={f } и выбранного класса алгоритмов A ={α} можно ввести функцию эффективности d(α, f ) , показывающую, насколько удачным было применение α к задаче f . Например, значение d можно
46
трактовать как меру остаточной погрешности в оценке решения задачи f с использованием метода α .
Функцию d* (α) называют гарантированной эффективностью метода
α на классе Φ, если d * (α) = sup{d (α, f ) : f Φ}.
Методы α* и αo из A |
назовем оптимальным и ε -оптимальным, |
соответственно, если |
|
d*(α* ) = inf {d*(α) :α A}; |
d*(αo ) ≤inf{d*(α) :α A}+ε, (ε >0). |
Заметим, что оптимального метода может не существовать, но ε -оптимальный всегда существует.
Кроме введенного понятия оптимальности по отношению к априорной информации о функции ( f Φ), при построении методов широко использует-
ся понятие последовательной оптимальности, в частности, одношаговой оптимальности, учитывающее текущую поисковую информацию.
Пусть метод α уже выполнил k испытаний, результаты которых запомнены в виде поисковой информации ωk . Обозначим через Φωk
апостериорный класс функций
Φωk = { f Φ : (xs , Js ) ωk : J (xs , f ) = Js }.
Таким образом, в классе Φωk содержатся те функции из исходного класса Φ,
результаты испытаний которых во всех точках xs уже проведенных испытаний совпадают с имеющимися результатами Js этих испытаний. Функции из Φωk
неразличимы по результатам испытаний в точках xs ( s =1,K, k ).
Пусть функция d(ωk ) описывает эффективность проведенных
испытаний. Гарантированной эффективностью очередного испытания в точке x называют
d*(ωk , x) =sup{d(ωk (x, J)): J = J(x, f ), f Φωk }.
Говорят, что метод α последовательно оптимален на один шаг вперед
(одношагово оптимален), если выбор следующего испытания подчиняется условию
xk +1 = arg inf { d* (ωk , x) : x E},
Если нижняя грань в определении xk +1 не достигается, используют значение x , обеспечивающее ее ε -приближение.
47

4.2. Поиск минимума унимодальной функции на отрезке
Пусть Φu - класс функций Q, унимодальных на отрезке
должны иметь на этом отрезке единственный глобальный минимум (обозначим его x*) и строго убывать на [a, x*], а на [x*,b] – строго возрастать. Унимодаль-
ные функции не обязаны быть непрерывными. Их испытания включают только измерения значений функции.
Пусть методом α проведено N измерений в точках a < x1 <K< xN <b |
||
с результатами |
Q =Q(xk ) и |
k*(Q) = arg min{Q : k =1,K, N}, где под |
|
k |
k |
« argmin» понимается номер испытания с наименьшим значением. Тогда
x* [xk* (Q)−1, xk* (Q)+1].
Заметим, что здесь под x0 и xN +1, по определению, понимаются точки a и b, в которых измерения не проводятся. Данный интервал является оценкой
решения, т.е. eN =[x |
k* (Q)−1 |
, x |
k* (Q)+1 |
]. Эффективность |
выполненных |
|
|
|
|
||
измерений можно оценить длиной этого интервала. Заметим, |
что в общем |
||||
случае не только номер k*(Q) , но и координаты самих точек измерений xk зависят от функции Q .
N -шаговые пассивные методы
Если метод αN проводит ровно N измерений, то такой метод называют N -шаговым. Если для метода αN правила Pk выбора точек испытаний не зависят от накопленной поисковой информации ωk , то метод называют пассивным. Пассивный N -шаговый метод αNпас полностью определяется набором точек измерений a < x1 < x2 <K< xN < b , положение которых не
зависит от минимизируемой функции. Для таких методов функцию эффективности можно принять в виде
d (αNпас, Q) = xk * (Q)+1 − xk * (Q)−1;
гарантированная эффективность на классе Q Φu примет вид
d * (αNпас) = max{xk +1 − xk −1 : k =1,K, N}.
Это позволяет построить для каждого N оптимальные или ε - оптимальные пассивные алгоритмы, гарантированная эффективность которых
оказывается равной |
(b − a) |
((N +1) 2) |
для нечетных |
N |
и |
(b − a) (N 2 +1) +ε |
для четных |
N . Для этих методов степень сокращения |
|||
48
исходного интервала невысока за счет пассивного характера поиска. Последовательные методы могут обладать лучшей эффективностью.
Метод дихотомии – неоптимальный последовательный метод
Это простой последовательный метод, позволяющий сокращать интервал поиска в два раза с использованием каждых двух новых измерений. Первое измерение не приводит к сокращению интервала. Данный метод не является ни оптимальным, ни ε -оптимальным.
Описание алгоритма
(a)Задать δ > 0 – точность решения.
(b)Положить c = (a +b) 2 и Qc =Q(c) .
2 и Qc =Q(c) .
(c)Пока b −a >δ , выполнять пункт (d), иначе – перейти на пункт (e).
(d) Вычислить x = (a +c) 2, Qx =Q(x), |
y = (c +b) 2 и Qy =Q(y). |
|
Используя измерения функции в трех точках x , |
c и |
y ( a < x <c < y <b), в |
зависимости от того, какое из трех значений Qx , Qc , |
Qy меньше, установить |
|
новые значения: если наименьшим было Qx , то b :=c, c := x, Qc :=Qx ; если |
||
наименьшим было Qc , |
то a := x, b := y; если наименьшим было Qy , то a := c, |
||||
c := y , Qc :=Qy (рис. 4.1). Вернуться на пункт (c). |
|||||
|
|
(e) Полученный интервал [a, b] принять в качестве интервальной оценки |
|||
решения. |
|
эффективность метода дихотомии за N измерений |
|||
|
|
Гарантированная |
|||
d |
* |
дих |
(N −1) 2 |
( N всегда нечетно). |
|
|
(αN ) = (b −a) |
2 |
|
||
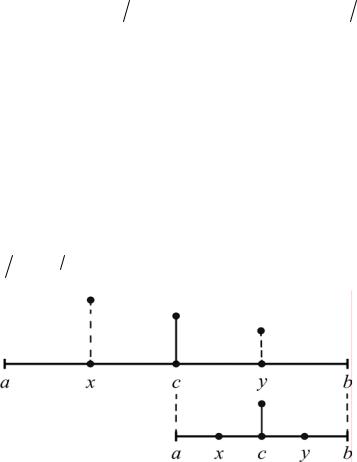
Рис. 4.1. Один из трех возможных случаев сжатия интервала поиска в методе дихотомии после двух новых измерений в точках x и y
Метод золотого сечения и метод Фибоначчи
Рассмотрим методы, которые для очередного сжатия интервала поиска используют только одно новое измерение (кроме начального этапа, требующего проведения сразу двух измерений). Исходя из симметрии задачи, первые два
измерения в точках x2 и y2 целесообразно размещать симметрично
49

относительно центра интервала, а на вновь образованных интервалах новое измерение проводить в точке, симметричной точке прежнего измерения, существующей внутри интервала (рис. 4.2).
Обозначим через λk доли, составленные длинами соответствующих
частей текущего интервала по отношению к его собственной длине. Из рис. 4.2 вытекает следующая их взаимосвязь:
Рис. 4.2. Размещение точек измерений в симметричном методе |
|
||||||
λk |
= |
|
|
1 |
. |
(4.3) |
|
1 |
+ λk +1 |
||||||
|
|
|
|
||||
Метод золотого сечения использует постоянную пропорцию деления λk =τ = ( 5 −1) 2 , полученную как стационарное решение уравнения (4.3).
5 −1) 2 , полученную как стационарное решение уравнения (4.3).
Описание алгоритма
(a) Задать δ > 0 - точность решения.
(b) Провести измерение в точке y = a + (b − a) τ , Qy = Q( y) и построить новую точку x = b − (b − a) τ .
(c)Пока b −a >δ , выполнять пункт (d), иначе – перейти на пункт (e).
(d)Провести измерение в новой точке ( x или y ) и запомнить результат
(в Qx или Qy ). Если Qx < Qy , то положить b := y , y := x , Qy := Qx и выбрать новую точку x =b −(b −a) τ ; иначе, при Qx > Qy , положить a := x , x := y , Qx := Qy и выбрать новую точку y = a + (b − a) τ . Вернуться к пункту (c).
(e) полученный интервал [a,b] принять в качестве интервальной оценки
решения.
Гарантированная эффективность метода золотого сечения за N измерений d * (αNз.с. ) = (b − a) τ N −1 < d * (αNдих. ) .
Метод Фибоначчи построен американцем Дж. Кифером (J. Kiefer) в 1953 году и назван в честь использованной в нем последовательности чисел
50