

Система сходящихся сил.
Если линии действия сил пересекаются в одной точке, то такая система сил называется сходящейся.
2)Пусть
к твердому телу приложена сх-ся система
сил: ( ).
Необходимо найти равнодействующую этой
силы. Используя следствие из аксиомы
присоединения и исключения уравновешенной
системы сил. Согласно этой аксиоме можно
точки приложения сил переместить вдоль
линии действия в т. О. При этом полученная
система сил, будет эквивалентна нашей.
Теперь последовательно используется
з-н параллелограмма:
).
Необходимо найти равнодействующую этой
силы. Используя следствие из аксиомы
присоединения и исключения уравновешенной
системы сил. Согласно этой аксиоме можно
точки приложения сил переместить вдоль
линии действия в т. О. При этом полученная
система сил, будет эквивалентна нашей.
Теперь последовательно используется
з-н параллелограмма:

 …
…
 Т.о.
доказано,
что система сх-ся сил имеет равнодействующую
, равную геометрической сумме этих сил
и приложенную в точке пересечения линий
действия этих сил.
Т.о.
доказано,
что система сх-ся сил имеет равнодействующую
, равную геометрической сумме этих сил
и приложенную в точке пересечения линий
действия этих сил.
4) Условие равновесия:
Для
равновесия
твердого тела, к которому приложена
сх-ся система сил необходимо и достаточно,
чтобы равнодействующая данной силе
равнялась
0,
т.е:
 - Уравнение равновесия системы сх-ся
сил в векторной форме.
- Уравнение равновесия системы сх-ся
сил в векторной форме.
 -
Уравнение равновесия системы сх-ся сил
в пространстве.
-
Уравнение равновесия системы сх-ся сил
в пространстве.
5) Теорема (о 3х силах): Если плоская система 3-х непараллельных сил находиться не в равновесии, данная система сил явл-ся сх-ся.
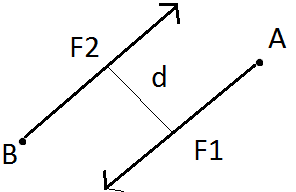
Теория пар сил.
1)Парой сил наз-ся система двух равных по модулю параллельных и противоположных по направлению сил.
2)Теорема: Пара сил не имеет равнодействующей.
3)Момент пары - есть свободный вектор, определяемый след образом:
 .
.
Этот вектор ┴ пл-ти действия пары. Направлен в ту сторону, откуда вращение видно совершающимся против часовой стрелки.
4)Т1. Действие пары на абсолютно твердое тело не изменится, если переместить пару в другое положение плоскости ее действия.
Т2. Действие пары на абсолютно твердое тело не изменится, если плоскость ее действия будем переносить параллельно самой же себе.
Т3. Действие пары сил на абсолютно твердое тело не изменится, если изменить величину силы и плечо пары, не изменив при этом их произведение.
Т4. Система пар, действующих на абсолютно твердое тело эквивалентно одной паре, момент которой равен векторной сумме моментов этих пар.
Система сил, произвольно расположенных в пр-ве.
1)Основная Лемма:
Всякая сила приложенная к абсолютно твёрдому телу в данной т-ке А эквивалентна той же силе приложенной в другой т-ке В и паре моментов которые равны моменту силы приложенной в т-ке А относительно т-ки В.
Док-во: Есть сила F приложенная к т-ке А. Выбераем т-ку В и к ней приложим две силы
 и
и

 и
и

Получим
с-му сил
 .
Эту сис-му можно пред-ть как
.
Эту сис-му можно пред-ть как ,
, =>
=>
 ч.т.д.
ч.т.д.
2) Приведение системы сил к одной т-ке.
Дано
твёрдое тело, к которому приложена
произвольная с-ма сил

Выбираем некоторый центр О и перенесём все силы в эту т-ку.

… …


Найдём сумму сил:
 .
- главный
вектор с-мы сил.
.
- главный
вектор с-мы сил.
Просуммируем моменты пар сил:
 =
= -главный
момент.
-главный
момент.
Тело находится в равновесии тогда и только тогда, когда главный вектор и главный момент = 0.
3)Сформулировать условия равновесия произвольной плоской системы сил.
Произвольная плоская с-ма сил находится в равновесии т. и т.т., когда
 2)
2)
 .
.
4) Сформулировать условия равновесия произвольной пространственной системы сил.
Произвольная простран-ая с-ма сил находится в равновесии т.и т.т., когда главный в-р и главный момент с-мы сил равны 0, т.е.


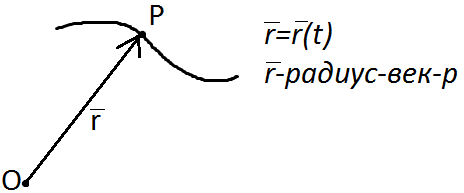
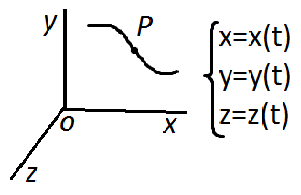
4. Векторный способ задания движения точки. Задание движения точки в декартовых координатах.
1) Векторный с-б: 2) Координатный с-б:
3)
 –средняя скорость т-ки за промежуток
времени
–средняя скорость т-ки за промежуток
времени .
.
Скоростью
точки в данный м-т времени наз предел
средней скорости т-ки, при

Векторный:
 (t)=
(t)=
Координатный:
 ;
;
 (t)=
(t)=

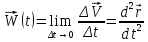
4)
 -
среднее ускорение т-ки за промежуток
времени
-
среднее ускорение т-ки за промежуток
времени .
.
Ускорением
т-ки в данный м-т времени наз предел
среднего ускорения при
 .
.
Векторный:
Координатный:

= (t)k
(t)k
5. Естественные координатные оси. Вектор кривизны
1)
Опр.Предельное
положение прямой проходящей через точки
Р и
 ,
когда точка
,
когда точка определяют касательную
к кривой в точке Р.(СМ.РИС. В КОНСПЕКТЕ)
Единичный вектор касательной будем
обозначать
определяют касательную
к кривой в точке Р.(СМ.РИС. В КОНСПЕКТЕ)
Единичный вектор касательной будем
обозначать
 .
.
Опр.Перпендикуляр к касательной в точке Р наз. нормалью к кривой в этой точке. Очевидно, что прямых перпендикулярных к касательным бесконечно много, все они будут лежать в плоскости перпендикулярной к касательной. Эта плоскость наз. нормальной плоскостью.
Опр.Соприкасающаяся
плоскость
определяется, как предельное положение
плоскости проходящей через касательную
в точке Р и любую точку
 ,
когда
,
когда
 .
Опр.Нормаль
лежащая в соприкасающейся плоскости
наз. главной
нормалью.
Единичный вектор главной нормаль мы
обозначаем
.
Опр.Нормаль
лежащая в соприкасающейся плоскости
наз. главной
нормалью.
Единичный вектор главной нормаль мы
обозначаем
 .
.
Опр.Нормаль
перпендикулярная соприкосающейся
плоскости наз. бинормалью.
Единичный вектор бинормали обозначается
 .
Плоскость образующаяся касательной и
бинормалью наз.спрямляющей
плоскостью.
Вектора
.
Плоскость образующаяся касательной и
бинормалью наз.спрямляющей
плоскостью.
Вектора
 наз. осями естественного трехгранника,
они взаимно перпендикулярны и образуют
правую тройку векторов.
наз. осями естественного трехгранника,
они взаимно перпендикулярны и образуют
правую тройку векторов.
2)
СМ. РИС. В КОНСПЕКТЕ. На кривой выбираем
точки Р и
 .
Пусть
.
Пусть - единичный
векторо касательной
проведенной в точке Р, а
- единичный
векторо касательной
проведенной в точке Р, а
 - единичный вектор касательной проведенной
в точке
- единичный вектор касательной проведенной
в точке .
Перенесем вектор
.
Перенесем вектор
 в т. Р. Вектор
в т. Р. Вектор
 - это приращение орта (единичного вектора)
- это приращение орта (единичного вектора) .
Через
.
Через обозначим длину дугиР
обозначим длину дугиР ,
вектор
,
вектор наз. вектором
средней кривизны.
наз. вектором
средней кривизны.
 =
=
Вектор
средней кривизны характерезует поворот
касательной на участке Р .
Этот вектор имеет направление вектора
.
Этот вектор имеет направление вектора , а следовательно направлени в сторону
вогнутости кривой.
, а следовательно направлени в сторону
вогнутости кривой.
 –наз.
кривизной
кривой в точке Р.
–наз.
кривизной
кривой в точке Р.
 ,
,
 -
- =
= (s-
(s- )=
)= ;
;