

Введение.
Для последних двух-трех десятилетий характерно появление больших, или сложных систем управления (СУ), так называемых технических комплексов. Сложной считается СУ, в которой:
-
имеется много объектов управления со сложной структурой связей между ними и с внешней средой;
-
объекты управления имеют существенно разнордные физические принципы действия;
-
имеется много режимов работы со своими специфическими целями управления;
-
в каждом из режимов устройствами управления одновременно выполняется множество разнородных функций. Помимо прямого управления осуществляется также координация, диагностика, идентификация;
-
имеет место иерархическая многоуровневая структура СУ;
-
имеется значительная неопределенность в поведении объектов управления и внешней среды.
К современным сложным системам можно отнести:
-
СУ ракетно-космическими комплексами;
-
СУ комплексами ПВО;
-
СУ авиационными комплексами;
-
некоторые АСУ ТП;
-
СУ робототехническими комплексами;
-
СУ некоторыми станками с ЧПУ и др..
Дисциплина «Управление сложными системами» ориентирована на проектирование АСУ ТП в составе ГАП, которые широко используют робототехнические комплексы (роботы, конвейерные и роторные линии, станки с ЧПУ и т.д.) и микропроцессорную технику. В качестве объекта исследования рассматриваются роботоконвейерные комплексы (РКК), представляющие собой участки гибкой автоматизированной линии.
В общем случае СУ РКК можно подразделить на два иерархических уровня. Нижний (исполнительный) уровень содержит локальные системы управления объектами, входящими в состав РКК, - роботами, станками с ЧПУ, технологическими, транспортными, вспомогательными агрегатами и т.п. Верхний уровень представляет собой систему логического управления (СЛУ), которая выдает дискретные сигналы типа «включить»-«выключить» на локальные системы и координирует их работу. На уровне локальных систем процесс управления непрерывен, а на уровне СЛУ – дискретен. Проектирование локальных систем управления нижнего уровня изучается в соответствующей дисциплине «Локальные САУ», в курсе «Управление сложными системами» рассматривается проектирование СЛУ дискретными процессами на примере РКК. Для составления модели процесса управления используется математический аппарат сетей Петри.
Настоящее издание содержит методические указания и задание на курсовую работу «Разработка процесса логического управления роботоконвейерным комплексом».
1. Краткие теоретические сведения
1.1. Элементы алгебры логики
Основу алгебры логики составляет логическая переменная X , которая может принимать два значения - 1 (истина) и 0 (ложь). Функция алгебры логики (ФАЛ) Y(X1,…,Хn) также может принимать только два значения (0,1) в зависимости от значений аргументов.
Конституента 1 - ФАЛ, которая принимает значение 1 лишь при единственном наборе значений аргументов, при остальных наборах она равна 0.
Конституента 0 - ФАЛ, которая равна 0 при единственном наборе значений аргументов, при остальных наборах она равна 1.
Инверсия
(логическое отрицание НЕ)
![]() имеет противоположное своему аргументу
значение.
имеет противоположное своему аргументу
значение.
Конъюнкция (логическое умножение И) Y=X1X2…Xn - это ФАЛ типа конституэнты 1, которая равна 1 лишь тогда, когда все аргументы равны 1, в остальных случаях Y=0.
Дизъюнкция (логическое сложение ИЛИ) Y=Х1+Х2+...+Xn- ФАЛ типа конституэнты 0 , которая равна 0 лишь тогда, когда все аргументы равны 0, в остальных случаях Y=1.
Функция "штрих Шеффера" (И-НЕ):
Y=![]() =Х1/Х2/.../Xn.
=Х1/Х2/.../Xn.
Функция "стрелка Пирса" (ИЛИ-НЕ) :
Y=![]() =Х1Х2...Xn
.
=Х1Х2...Xn
.
Любая произвольная ФАЛ может быть выражена через функции И, ИЛИ, НЕ.
Чтобы составить аналитическое описание фал типа конституэнты 1, необходимо выделить набор значений аргументов, при котором она равна 1, и записать конъюнкцию
~ ~ ~
Y=X1X2…Xn ,
где " ~ " означает отрицание в том случае, если аргумент в наборе равен 0.
ФАЛ типа конституэнты 0 записывается в виде дизъюнкции
~ ~ ~
Y=X1+ X2+…+Xn ,
где " ~ " означает отрицание в случае, если аргумент равен 1 в наборе, при котором ФАЛ равна 0.
Произвольная ФАЛ представляется в виде совокупности конституэнт 1 и 0 и записывается :
Y=f1l+f12+...+f1k;
либо Y=f01f02...f0m; k+m=n ;
где f 1i - ФАЛ типа конституэнты 1 , a foj - ФАЛ типа конституэнты 0.
Для преобразования ФАЛ используют законы алгебры логики :
1) переместительный : АВ=ВА ;
А+В=В+А ;
2) сочетательный : (АВ)С=(ВС)А=(АС)В ;
(А+В)+С=(В+С)+А=(А+С)+В;
3) распределительный :
I рода - А(В+С)=АВ+АС;
II рода - А+(ВС)=(А+В)(А+С);
4)правило
де Моргана:
![]() ;
;
![]() ;
;
5)поглощения
:
![]() ;
;
![]() .
.
Порядок вычисления логических выражений определяется скобками и рангом (старшинством) функций : 1) НЕ; 2) И; 3) ИЛИ.
1.2. Основные понятия теории сетей Петри
В общем случае дискретные процессы обладают свойствами параллельности, асинхронности, логической взаимосвязью событий в системе и условий их реализации. Наиболее удобным математическим аппаратом моделирования таких процессов являются сети Петри.
Сетью Петри называют двудольный ориентированный граф
N=(P,T,IN,OUT,M),
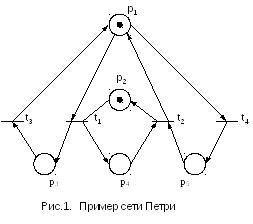
где P={p1...pn},T={t1...tm}- конечные множества вершин, называемых соответственно позициями и переходами. Позиции обозначаются кружками, а переходы - черточками (полочками).
Дуги в таком графе соединяют только позиции с переходами или переходы с позициями. Пример сети Петри приведен на рис.1.
Если из позиции pi дуга ведет в переход tj то pi называют входной позицией относительно перехода tj. В обратном случае, когда дуга направлена из перехода tj в позицию pi позиция pi является выходной для перехода tj. Множества входных и выходных позиций по отношению к переходу tj обозначают соответственно IN(tj) и OUT(tj). В сети Петри на рис.1
IN(t1)={p1,p2}; OUT(t1)={p3,p4}; IN(t2)={p4,p5}; ОUТ(t2)={ p1,p2}; IN(t3)={p3}; OUT(t3)={p1}; IN(t4)={p1}; OUT(t4)={p5}.
Маркировка сети Петри - это вектор M=(1,…, n), где i - целое неотрицательное число, равное числу маркеров в этой позиции. Графически маркеры обозначаются точками внутри позиций. Маркировка сети Петри характеризует состояние соответствующей ей динамической системы, причем динамика изменения состояний моделируется перемещением маркеров из входных позиций сработавших переходов в выходные.

Правила срабатывания переходов:
1. Сработать может только возбужденный переход, т.е. такой, во всех входных позициях которого имеется хотя бы по одному маркеру.
2. В результате срабатывания перехода из всех его входных позиций изымается строго по одному маркеру, и ровно по одному маркеру добавляется к маркировке каждой выходной позиции данного перехода.
3. Если несколько возбужденных переходов зависимы, т.е. имеют хотя бы одну общую входную позицию, то сработать может любой, но только один из них. Независимые возбужденные переходы могут срабатывать одновременно.
4. Срабатывание перехода - неделимый акт, происходящий мгновенно.
Функционирование сети Петри из начальной маркировки порождает последовательность срабатывания переходов и получаемых при этом маркировок, называемую деревом достижимости маркировок. Сети, изображенной на рис.1, соответствует дерево маркировок на рис.2.
Левая ветвь дерева представляет собой циклическую последовательность
t1 t3 t4 t2
М


 0
М1
М2
М3
М0
0
М1
М2
М3
М0
Маркировка М4 является тупиковой, т.к. при ней нет возбужденных переходов, и поэтому ни один переход не может сработать.
Сеть Петри - К- ограниченная, если при любой маркировке число маркеров в каждой позиции не превышает К. При К=1 сеть называют безопасной.
Сеть Петри "живая", если в ней нет тупиков.
Живые и безопасные сети называют правильными.
Дерево достижимости маркировок (см. рис.2) показывает, что сеть на рис.1 - безопасная, но неживая, и поэтому не является правильной.
Сложные сети, или сети со стратификацией, допускают вложение одного участка сети в другой. Стратификационные позиции обозначаются двойным кружком (рис.3,а). Пример вложенной сети n1 приведен на рис.3,б. При попадании маркера в позицию р1, он автоматически попадает в позицию р2, а дойдя до позиции р4, возвращается в позицию p1. Построение эквивалентной простой сети заключается в замене стратификационной позиции p1 вложенной сетью n1. В результате получаем эквивалентный участок сети, показанный на рис.3,в. Вложенная сеть должна начинаться и заканчиваться простой позицией.