

4. Разработка кинематической схемы приводов модулей главного движения
4.1. Определение кинематических показателей
и зависимостей привода модуля со ступенчатым
регулированием частот вращения шпинделя
Коробки передач приводов модулей металлообрабатывающих станков могут иметь нормальную множительную структуру в виде кинематической цепи с одинаковым количеством передач при любой ступени работы привода и сложенную - в виде кинематических цепей с различным количеством передач для отдельных ступеней [4, 9, 29]. При ступенчатом регулировании частот вращения шпинделя должно обеспечиваться получение стандартного ряда, подчиняющегося закону геометрической прогрессии c одним из знаменателей = 1,06; 1,12; 1,25; 1,4; 1,6; 1,8; 2 [5].
В данной теме рассматриваются нормальные множительные структуры, которые состоят из групп передач, расположенных последовательно. К группе передач относятся передачи, расположенные между соседними валами, она обеспечивает количество частот вращения ведомого вала равное числу передач. Общее количество частот вращения ведомого вала привода модуля находится как произведение количества частот вращения, обеспечиваемых каждой группой.
Последовательность определения кинематических показателей и зависимостей привода модуля:
а) cоставление принципиальных кинематических схем привода в 2-х вариантах - с передвижными блоками и с электромагнитными муфтами, краткое описание схем;
б) определение конструктивного и кинематического порядков для групп передач;
в) определение количества передач Pij и характеристик xij каждой группы передач;
г) выражение частных передаточных отношений с помощью диаметров шкивов и чисел зубьев колес и установление связей этих передаточных отношений;
д) определение диапазонов регулирования частот вращения групп передач Rij и характеризующих их показателей степени aij при знаменателе ряда частот вращения шпинделя ;
е) определение наибольшего допускаемого значения знаменателя стандартного ряда частот вращения шпинделя maх;
ж) выражение общих передаточных отношений привода для последовательных частот вращения шпинделя.
Принципиальная кинематическая схема привода модуля строится в соответствии с его структурной формулой, которая на данном этапе рассматривается без индексов. На схеме (см. рис. 9) должны быть показаны все элементы кинематики с указанием их позиций. Для шкивов и зубчатых колес целесообразно эти позиции указывать соответственно возрастанию частных передаточных отношений с учетом относительных размеров.
При определении конструктивного и кинематического порядков структурной формулы анализируется структурная формула с индексами. В общем виде, без указания постоянных передач, эта формула для привода со ступенчатым регулированием частот вращения последнего вала по закону геометрической прогрессии имеет вид
![]() .
(6)
.
(6)
где Р – количество передач в группе;
a, b, c – первые индексы, характеризующие конструктивный
порядок групп передач;
m, n, f - вторые индексы, характеризующие кинематический
порядок групп передач.
В общем случае группа передач может быть представлена как Рij, где i = a, b, c; j = m, n, f.
Конструктивный порядок группы передач показывает ее расположение в приводе в последовательности передачи движения от вала электродвигателя последнему валу (шпинделю). Этот порядок всегда последовательный, т.е. а =1, b = 2, с = 3… .
Кинематический порядок группы передач устанавливается при проектировании привода. Группа передач, которая переключается в первую очередь при последовательном изменении частоты вращения последнего вала привода, называется первой кинематической или основной, в этом случае второй индекс для этой группы в структурной формуле равен единице. Основной может быть группа с любым конструктивным порядком.
Группа передач, переключаемая во вторую очередь, называется второй кинематической или первой переборной (в структурной формуле для данной группы второй индекс равен двум). Группа передач, переключаемая в третью очередь (второй индекс для нее равен трем), называется третьей кинематической или второй переборной и.т.д.
Количество передач в группах Pij соответствует основным цифрам структурной формулы.
Характеристика группы передач xij показывает количество скоростей (частот вращения), переключаемых перед данной группой. Для первой кинематической группы характеристика равна единице, для второй кинематической группы характеристика равна числу частот вращения (передач) первой кинематической группы. Для третьей кинематической группы, если она есть, характеристика равна произведению количества частот вращения, обеспечиваемых первой и второй кинематическими группами и т.д.
Наличие постоянных передач в структурной формуле обусловлено конструктивными факторами, они могут находиться в любом месте формулы. Постоянные передачи и их расположение не оказывают влияния на значения Рij и хij.
Определение связей частных передаточных отношений.
Частные передаточные отношения выражаются с помощью обозначений шкивов и зубчатых колес, приведенных на принципиальной кинематической схеме.
Конструктивный и кинематический порядки структурной формулы оказывают влияние на связи частных передаточных отношений каждой группы передач и в целом на габариты привода. Поэтому при проектировании выбор структурной формулы должен быть обоснован.
Для группы передач связи частных передаточных отношений подчиняются условию
![]() ,
(7)
,
(7)
где Рij – количество передач группы;
xij – характеристика группы;
– знаменатель ряда частот вращения ведомого вала
(шпинделя) привода.
Диапазон регулирования частот вращения группы передач определяется с учетом уравнения (5) по формуле
![]() ,
(8)
,
(8)
где аij – показатель степени при , характеризующий диапазон регулирования частот вращения группы передач
![]() .
(9)
.
(9)
Определение наибольшего допускаемого знаменателя maх
Показатели групп передач позволяют определить приемлемость структурной формулы при заданном знаменателе или значение max, допускаемое при использовании конкретной формулы. Эта проверка проводится с учетом ограничений допускаемых частных передаточных отношений, установленных на основании практики проектирования станков. Исходя из минимизации радиальных габаритов привода для зубчатых передач привода модуля главного движения эти ограничения соответствуют
![]() ,
(10)
,
(10)
для привода модуля подачи
![]() .
(11)
.
(11)
В
случае предельных частных передаточных
отношений (при проектировании их по
возможности следует избегать) в приводе
модуля главного движения imax
= 2, imin
= 0,25. Наибольший
допускаемый диапазон регулирования
группы передач
![]() .
Эта величина представляется в виде
.
Эта величина представляется в виде
![]() ,
(12)
,
(12)
что позволяет проводить проверку структурной формулы по условию
![]() ,
(13)
,
(13)
при этом
![]() ,
(14)
,
(14)
отсюда
![]() .
(15)
.
(15)
Для конкретной структурной формулы должно выполняться условие max , где - заданный или анализируемый знаменатель стандартного ряда частот вращения шпинделя; max - наибольший стандартный знаменатель, допускаемый в данном случае.
Общие передаточные отношения приводадля различных ступеней частот вращения шпинделя при их переключении в последовательном порядке определяются с учетом частных передаточных отношений и кинематического порядков групп передач.
Пример выполнения задания для привода,
соответствующего структурной формуле 1 312 221 = 6
а). Построение принципиальной кинематической схемы
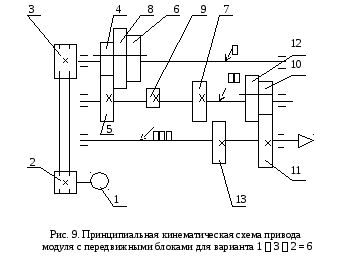
Для варианта структурной формулы 1 3 2 = 6 (при построении кинематической схемы индексы структурной формулы не учитываются) на рис. 9 приведена принципиальная кинематическая схема привода модуля с передвижными блоками.
Первая группа передач, расположенная между валами и , содержит три зубчатые передачи 4 – 5, 6 – 7, 8 – 9 и при постоянной частоте вращения первого вала обеспечивает три частоты вращения вала .
Вторая группа передач, находящаяся между валами и , имеет две передачи 10 -11, 12 – 13 и при постоянной частоте вала обеспечивает две частоты вращения вала . Общее количество частот вращения шпинделя (вала ) определяется, как произведение количества передач последовательно расположенных групп 3 2 = 6.
На рис. 10 для варианта 1 3 2 = 6 показана принципиальная кинематическая схема привода модуля в случае применения муфт. В этом случае все передачи показываются в зацеплении, одно из колес каждой передачи соединяется с валом при включении соответствующей муфты.
В качестве муфт могут применяться муфты различного типа. При использовании в приводе электромагнитных муфт (рис. 10) обеспечивается возможность автоматического управления переключением частот вращения на ходу шпинделя.

Муфты должны быть сблокированы между собой таким образом, чтобы в каждой группе передач в любой момент работы была включена только одна муфта.
б). Определение конструктивного и кинематического
порядков структурной формулы
В структурной формуле 1 312 221 = 6 цифра 1 означает постоянную передачу (ременную или зубчатую), группа с числом передач 3 является первой конструктивной и второй кинематической, группа с числом передач 2 является второй конструктивной и первой кинематической.
в). Определение количества передач и характеристик групп
передач порядков структурной формулы
В общем виде структурная формула данного привода может быть представлена как 1 Р12 Р21 = 6, где Р12 , Р21 – количество передач в группах. Для рассматриваемого примера Р12 = 3, Р21 = 2, z = 6.
С учетом вышесказанного характеристики групп передач х12 = 2, х21 = 1.
г). Выражение частных передаточных отношений
Для
постоянной передачи
![]() ,
где
- коэффициент скольжения ременной
передачи;
,
где
- коэффициент скольжения ременной
передачи;
для передач первой конструктивной группы
![]() ,
,
![]() ,
,![]() ;
;
для передач второй конструктивной группы
![]() ,
,
![]() .
.
Связи частных передаточных отношений определяются с учетом формулы (5):
для первой конструктивной группы
![]() ,
,
![]() ;
;
для второй конструктивной группы
![]() ,
,
![]() ;
;