

57 Применение нейронных сетей в задачах адаптации алгоритмов управления нелинейными объектами.
Методы адаптивного
управления сегодня хорошо разработаны,
главным образом, для объектов, описываемых
линейными дифференциальными уравнениями
с переменными коэффициентами. В то же
время нелинейная природа нейронных
сетей, их возможности к обучению с
учетом реальных характеристик объекта
делают их чрезвычайно перспективными
для решения задач управления сложными
нелинейными объектами. Механизм обучения
НС позволяет учесть при этом нелинейную
динамику объекта, вызванную неполнотой
его известного математического описания,
шумы измерений, резкие (структурные)
возмущения и т.п. Целью обучения НС
является уменьшение вектора ошибки
 ,
т.е. разности между вектором задающих
воздействий
,
т.е. разности между вектором задающих
воздействий ,
определяющим
программу движения робота, и вектором
фактических значений выходных координат
,
определяющим
программу движения робота, и вектором
фактических значений выходных координат
 .
В случае
.
В случае перемещения всех звеньев робота-манипулятора
осуществляются по заданным (желаемым)
траекториям.
перемещения всех звеньев робота-манипулятора
осуществляются по заданным (желаемым)
траекториям.
Таким образом, применение НС обеспечивает возможность адаптивного управления нелинейным динамическим объектом за счет наличия в сети механизма настройки параметров (весов синаптических связей). Поскольку НС является по своей структуре распределенной вычислительной системой, то ее реализация в реальном времени (on-line) на ЭВМ параллельной архитектуры не потребует значительных временных затрат.
62. Нейрокомпьютер фирмы аас.
 Американская
фирма ААС (AccurateAutomationCorp.)
разработала нейрокомпьютерный чип на
базе MIMD
- архитектуры (MultipleInstruction
- MultipleData),
позволяющей обеспечить функционирование
группы чипов в параллельном режиме без
снижения уровня их производительности.
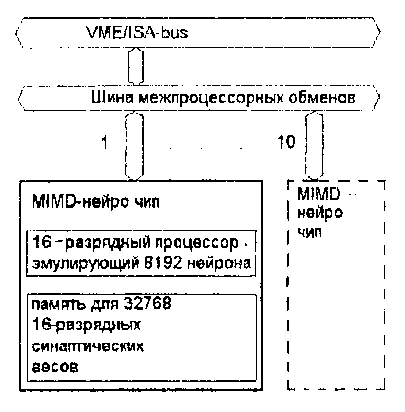
Нейрочип содержит 16-разрядный
специализированный процессор, эмулирующий
8192 нейрона, а также память для хранения
32768 16-разрядных синоптических весов.
Производительность нейрочипа 140
миллионов переключений в секунду.
Одновременное использование 10 нейрочипов
позволяет обеспечить производительность
1400 миллионов переключений в секунду.
Американская
фирма ААС (AccurateAutomationCorp.)
разработала нейрокомпьютерный чип на
базе MIMD
- архитектуры (MultipleInstruction
- MultipleData),
позволяющей обеспечить функционирование
группы чипов в параллельном режиме без
снижения уровня их производительности.
Нейрочип содержит 16-разрядный
специализированный процессор, эмулирующий
8192 нейрона, а также память для хранения
32768 16-разрядных синоптических весов.
Производительность нейрочипа 140
миллионов переключений в секунду.
Одновременное использование 10 нейрочипов
позволяет обеспечить производительность
1400 миллионов переключений в секунду.
Язык ассемблера нейрочипа содержит всего девять команд высокого уровня. Разработана шина межпроцессорных обменов, ориентированная на особенности выполнения нейроопераций. На рис. 32.15 представлена обобщенная схема нейрокомпьютера фирмы ААС.
Вместе с чипом поставляется пакет программного обеспечения, позволяющий реализовать основные виды нейронных сетей и наиболее распространенные алгоритмы обучения для этих сетей. При этом программное обеспечение оптимизируется с учетом параллельных вычислений. Чипы поставляются фирмой ААС на плате с контроллерами для ISA/VME - шин.
Нейрокомпьютер ААС (для VME-шины) был установлен на борту экспериментального галер звукового самолета со скоростью полета, в 5 раз превышающей скорость звука, названного LoFLYTE (Low-ObservableFlightTestExperiment). На бортовой нейрокомпьютер разработки фирмы ААС возлагаются функции управления полетом самолета (поскольку летчик оказывается не в состоянии управлять летательным аппаратом на таких скоростях), обеспечение управления полетом в случае неисправностей в работе системы управления .