

mechanica-metod / Lab02
.pdfФедеральное агентство по образованию Сибирский государственный аэрокосмический университет
имени академика М. Ф. Решетнева
ПРОВЕРКА ВТОРОГО ЗАКОНА МЕХАНИКИ НА МАШИНЕ АТВУДА
Методические указания к выполнению лабораторной работы 2
Красноярск 2005
УДК 537.2 (075.5)
Рецензенты:
доктор физико-математических наук, профессор, заведующий кафедрой физики Е. В. БАБКИН; кандидат физико-математических наук А. Г. БАРАНОВ
Проверка второго закона механики на машине Атвуда:
Метод. указания к выполнению лабораторной работы 2 / Сост.: Н. А. Шепета, Т. А. Слинкина; СибГАУ. Красноярск, 2005. 12 с.
В методической разработке приведены краткая теория, описание экспери- ментальной установки и порядок выполнения лабораторной работы. Даны вопросы и список рекомендуемой литературы, необходимой для подготовки, проведения и защиты работы. По содержанию и объему работа соответствует программе курса общей физики для высших технических учебных заведений по курсу «Механика».
© Сибирский государственный аэрокосмический университет имени академика М. Ф. Решетнева, 2005
Подписано в печать 12.01.2005. Формат 60×84/16. Бумага офисная. Гарнитура «Таймс». Печать плоская. Уч-изд. л. 0,83. Усл. п. л. 0,69.
Тираж 200 экз. Заказ С
Отпечатано в отделе копировально-множительной техники СибГАУ. 660014, г. Красноярск, просп. им. газ. «Красноярский рабочий», 31.
2
Лабораторная работа 2
ПРОВЕРКА ВТОРОГО ЗАКОНА МЕХАНИКИ НА МАШИНЕ АТВУДА
Оборудование: машина Атвуда, перегрузки, четыре груза, се- кундомер.
КРАТКИЕ ТЕОРЕТИЧЕСКИЕ СВЕДЕНИЯ
Динамика изучает движение тел в связи с теми причинами (взаимодействиями между телами), которые обуславливает тот или иной характер движения. В основе классической механики лежат три закона динамики, сформулированные Ньютоном в 1687 г. Механика, основывающаяся на этих законах, является механикой тел больших (по сравнению с массой атомов) масс, движущихся с малыми (по сравнению со скоростью света) скоростями.
Согласно первому закону Ньютона всякое тело находится в состоянии покоя или равномерного и прямолинейного движения, по- ка воздействие со стороны других тел не заставит его изменить это состояние. Из определения механического движения как изме- нения взаимного расположения тел в пространстве следует, что, при- ступая к изучению движения какого – либо тела, нужно указать, по отношению к какому телу (или телам) мы рассматриваем движение данного тела. Совокупность тела, по отношению к которому рассматривается движение (оно называется началом отсчета), и от- считывающих время часов образует систему отсчета. Для того чтобы получить возможность описывать движение количественно, необхо- димо связать с телами, образующими систему отсчета, какую – либо систему координат, например, декартову. Движение одного и того же тела относительно различных систем отсчета может иметь раз- ный характер. Среди всевозможных систем отсчета существуют та- кие, относительно которых движение тел оказывается особенно про- стым. В частности, тела, не подверженные воздействию других тел, движутся относительно таких систем без ускорения, т. е. прямоли- нейно и равномерно. Эти системы отсчета называются инерциаль- ными. Фактически утверждение о существовании инерциальных систем отсчета Ньютон сформулировал в виде закона инерции, кото- рый и называют его первым законом.
Инерциальных систем существует бесконечное множество. Опытным путем установлено, что система отсчета, центр которой совмещен с Солнцем, а оси направлены на соответствующим обра- зом выбранные звезды, является с очень высокой степенью точности инерциальной. Она называется гелиоцентрической системой отсчета. Любая система отсчета, движущаяся равномерно и прямолинейно относительно гелиоцентрической системы, сама будет инерциаль- ной. Земля движется относительно Солнца и звезд по криволинейной траектории, имеющей форму эллипса (криволинейное движение все- гда происходит с некоторым ускорением) и вращается вокруг своей оси. Однако ускорение такой системы настолько мало, что в боль- шинстве случаев им можно пренебречь и считать систему отсчета связанную с земной поверхностью инерциальной.
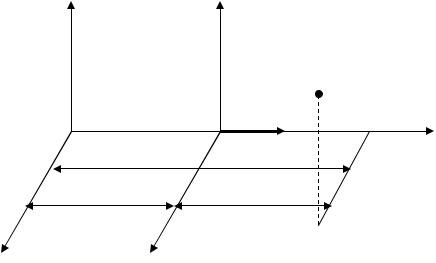
y K |
y′ |
K′ |
|
|
P |
O |
O′ |
V0 |
|
x |
x, x′ |
|
|
|
V0t |
|
x′ |
z |
z′ |
|
Рис. 1
Рассмотрим две системы отсчета, движущиеся относительно друг друга с постоянной скоростью V0. Систему К будем условно считать неподвижной. Тогда вторая система К′ будет двигаться пря- молинейно и равномерно (рис. 1). Найдем связь между координата- ми x, y, z, некоторой точки Р в системе К и координатами x′, y′, z′ той же точки в системе К′. Отсчет времени начнем с того момента, когда
3 |
4 |

начала координат обеих систем совпадали и предположим, что время в обоих системах течет одинаково, тогда
x = x′ + V0t′, y = y′, z = z′, t = t′. |
(1) |
Совокупность этих четырех уравнений, которые справедливы с большой степенью точности в рамках ньютоновской механики, на- зывают преобразованиями Галилея. Продифференцировав эти соот- ношения по времени, найдем связь между скоростями точки Р по отношению к системам отсчета К и К′:
dx |
= |
|
dx' |
|
+ V |
или V |
|
= V |
' + V , |
||||||||
|
|
|
|
x |
|||||||||||||
dt dt |
0 |
|
|
|
|
x |
0 |
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
dy |
= |
dy' |
или V |
|
= V ′, |
(2) |
|||||||
|
|
|
|
|
|
|
|
y |
|||||||||
|
|
|
|
dt |
|
|
|
dt |
|
|
|
|
y |
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
dz |
= |
dz' |
|
или V |
|
|
= V ′ . |
|
|||||||
|
|
|
|
z |
|
||||||||||||
|
|
dt |
|
|
dt |
|
|
z |
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|||||||
Эти соотношения выполняются только при выборе осей, пока- занном на рис. 1. Однако отсюда можно записать выражение для со- отношения скоростей в векторной форме, которое будет справедливо
при произвольном выборе |
взаимных |
направлении координатных |
||
r |
|
r |
r |
|
осей систем К и К′: V |
= |
V' + V0 . Теперь продифференцировав это вы- |
||
|
|
|
|
r |
ражение по времени |
с |
учетом того, |
что V0 постоянна, получим |
|
rr
dV = d V' или a = a'. Отсюда следует, что ускорение какого – либо dt dt
тела во всех системах отсчета, движущихся относительно друг друга прямолинейно и равномерно, оказывается одним и тем же.
Поэтому если одна из этих систем инерциальна (это значит, что при отсутствии сил a = 0), то и остальные будут инерциальными ( a' также равно нулю). А уравнения динамики не изменяются при переходе от одной инерциальной системы отсчета к другой, т. е. инва- риантны по отношению к преобразованию координат, соответствую- щему переходу от одной инерциальной системы отсчета к другой. С механической точки зрения все инерциальные системы отсчета со- вершенно эквивалентны: ни одной из них нельзя отдать предпочтение перед другими. Положение о том, что все механические явления в различных инерциальных системах отсчета протекают одинаковым
образом, вследствие чего никакими механическими опытами невоз- можно установить, покоится данная система отсчета или дви- жется прямолинейно и равномерно, носит название принципа отно- сительности Галилея.
Всовременной физике различают четыре вида взаимодейст- вия: 1) гравитационное (или взаимодействие, обусловленное все- мирным тяготением); 2) электромагнитное (осуществляемое через электрические и магнитные поля); 3) сильное или ядерное (обеспе- чивающее связь частиц в атомном ядре) и 4) слабое (ответственное за многие процессы распада элементарных частиц).
Врамках классической механики имеют дело с гравитацион- ными и электромагнитными силами, а также с упругими силами и силами трения. Два последних вида сил определяются характером взаимодействия между молекулами вещества. Силы взаимодействия между молекулами имеют электромагнитное происхождение. Сле- довательно, упругие силы и силы трения являются по своей природе электромагнитными.
Гравитационные и электромагнитные силы являются фунда- ментальными – их нельзя свести к другим, более простым, силам. Упругие же силы и силы трения не являются фундаментальными.
Второй закон механики устанавливается зависимость между r
ускорением a и силой F для тела с массой m:
r
r |
= F . |
(3) |
a |
m
Второй закон Ньютона выводится на основании двух положений: 1. Если рассмотреть действие различных сил на одно и то же тело, то оказывается, что ускорение пропорционально равнодейст-
вующей приложенных сил:
r |
|
r |
|
|
a |
= |
F |
|
|
r1 |
r1 |
при m = const. |
(4) |
|
a2 |
|
F2 |
|
|
2. Чем больше масса тела, тем больше его инертность, и тем меньшее ускорение под действием данной силы оно приобретает, т. е.
r |
|
m |
r |
|
|
a |
= |
|
|||
r1 |
2 |
при F = const. |
(5) |
||
m1 |
|||||
a2 |
|
|
|
5 |
6 |

До сих пор нет общепринятого истолкования второго закона механики. Сложность состоит в том, что не существует независимых
способов определения величин m и F , входящих в уравнение (3). Для определения одной из них приходится использовать соотноше- ние, связывающее эту величину с другой и с ускорением.
Всякое действие тел друг на друга носит характер взаимодей-
ствия. Третий закон Ньютона утверждает, что силы, с которыми действуют друг на друга взаимодействующие тела, равны по моду- лю и противоположны по направлению. Содержание третьего закона можно представить в виде равенства:
F12 = −F21. |
(6). |
Из третьего закона Ньютона вытекает, что силы возникают попарно: всякой силе, приложенной к какому-то телу, можно сопоставить равную ей по модулю и противоположно направленную силу, приложенную к другому телу, взаимодействующему с
данными.
Цель работы: проверить соотношения (4) (опытным путем требуется доказать, что при действии различных сил на одну и ту же систему, ускорение прямо пропорционально равнодействующей при- ложенных сил).
На рис. 2 представлен схематический вид установки, которая состоит из длинной, разделенной на сантиметры рейки, четырех раз- личных грузов, подвешенных на нитях и перекинутых через блок. Секундомер, употребляемый в этой работе для измерения времени, который автоматически включается в момент начала движения сис- темы и выключается при соприкосновении груза к полке D.
На рис. 3 приведена система грузов разной массы (М1 > M2) подвешенных на нити, перекинутой через блок. Грузы участвуют в поступательном движении, и на них действует силы, показанные на рис. 3. Запишем второй закон Ньютона для грузов в векторной фор- ме, а затем в проекциях на ось y.
|
|
r |
r |
r |
|
|
|
|
|
+ T1 |
= M1a, |
|
|
||
M1g |
|
(7) |
|||||
|
|
r |
r |
r |
|
||
|
|
|
+ T2 |
= M 2a. |
|
||
M 2 g |
|
||||||
M1g − T1 = M1a, |
|
(8) |
|||||
M |
2 |
g − T = −M |
2 |
a. |
|||
|
|
2 |
|
|
|
||
Так как Т1 = Т2, то из (8) следует, что
a = |
(M1 |
− M 2 )g |
|
|
|
|
. |
(9) |
|
|
|
|||
|
M1 + M 2 |
|
||
|
В |
|
r |
|
T1 |
М |
r |
|
T1 |
|
r |
|
a |
К1 |
|
К2 |
M1 g |
|
|
D |
M2 g |
|
|
Рис. 2 |
Рис. 3 |
z
r
T2
r
T2
r a
y
В системе (8) вычтем второе уравнение из первого, тогда ре- зультирующая всех сил, действующих в рассматриваемой системе, равна:
F = M1g − M 2 g = (M1 + M 2 )a. |
(10) |
7 |
8 |

ПОРЯДОК РАБОТЫ
1.Перекинув нить через блок В (см. рис. 2), подбираем пере- грузок такой, чтобы при откидывании полки система двигалась рав- номерно (этот перегрузок компенсирует трение и в дальнейшем не учитывается).
2.Подбираем четыре груза так, чтобы (m1 + m2) была немного больше (m3 + m4). Больший груз (m1 + m2) помещаем слева на нити,
меньший (m3 + m4) – справа.
3.Поднимаем левый груз и фиксируем нить, включая элек- тромагнит ключом К1.
4.Из уравнения (10) определяем равнодействующую силу, со- общающую системе ускорение:
F1 = (m1 + m2 )g - (m3 + m4 )g.
5. |
Определяем время движения t1 системы, включая секундо- |
|||
мер ключом К2 (опыт повторяем 5 раз). |
|
|
||
6. |
Находим ускорение системы по формуле a = |
2h |
, предва- |
|
t 2 |
||||
|
1 |
|
||
|
|
1 ср |
|
|
рительно высчитав среднее время для всех измерений.
7. Снимаем с правой части груз m3 (груз меньшей массы) и пе- ревешиваем его на левую. При этом масса системы не изменится, а результирующая сила, действующая на систему будет
F2 = (m1 + m2 + m3 )g - m4 g.
8. Опять определяем 5 раз время падения левого груза t2 и на- ходим его среднее значение. Определяем ускорение при действии
второй силы a2 |
= |
2h |
. |
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
t22ср |
|
|
|
|
|
|
|
|
|
|
|
|
9. Вычисляем соотношения |
|
|
|
|
|
|
|
|
|||||||||
|
F |
= |
(m + m ) - (m + m ) |
= C , |
a |
= |
2h ×t22ср |
= |
t22ср |
= С |
|
||||||
|
1 |
1 |
2 |
|
3 |
4 |
|
1 |
|
|
. |
||||||
F |
(m + m + m ) - m |
|
a |
|
2h ×t 2 |
t 2 |
|||||||||||
|
|
4 |
1 |
2 |
|
|
2 |
|
|||||||||
2 |
|
1 |
2 |
|
3 |
|
|
|
1ср |
|
1ср |
|
|
||||
Расчет погрешности
1. Относительную погрешность первого отношения пункта (9) рассчитать по формуле:
d = |
DС |
= |
Dm2 |
+ Dm2 |
+ Dm2 |
+ Dm2 |
+ |
Dm2 |
+ Dm2 |
+ Dm2 |
+ Dm2 |
, |
1 |
1 |
2 |
3 |
4 |
1 |
2 |
3 |
4 |
||||
1 |
С1 |
|
(m1 + m2 - m3 - m4 )2 |
|
(m1 + m2 + m3 - m4 )2 |
|
||||||
где Dm берется равной 0,5 единицы наименьшего разряда, представ- ленного в числе m (например: дана масса груза 28,7 г, то его по- грешность следует принять равной Dm = ±0,05 г).
2. Вычислить средние арифметические значения t1 и t1 по формуле
|
1 |
n |
t = |
|
∑t , |
|
||
|
|
i |
|
n i =1 |
|
где n – число измерений.
3.Найти погрешности отдельных измерений и данные занести
втаблицу:
Dti1 = t1 - ti1 , Dti 2 = t2 - ti 2 .
4.Вычислить квадраты погрешностей отдельных измерений и данные занести в таблицу.
5.Вычислить среднеквадратичные погрешности Dt1 и Dt2 для измерений времени по формуле
Dt = 1n 
 ∑(t - ti )2 .
∑(t - ti )2 .
6. Определить относительную погрешность
|
DС |
2 |
|
|
2Dt |
2 |
2 |
|
2t |
2 |
|||||
|
|
|
|
|
|
|
|
|
|
1 |
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
||||
d2 = |
С |
2 |
= |
|
t |
2 |
|
|
+ |
t |
|
. |
|||
|
|
|
|
|
|
|
|
|
1 |
|
|||||
7. Вычислить абсолютные погрешности величин С1 и С2:
DС1 = С1 ×d1 и DС2 = С2 ×d2 .
9 |
10 |
8. Определить области значений F1 / F2 и a1 / a2 по формулам:
F1 |
= C ± C и |
a1 |
= C |
2 |
± C |
. |
|
|
|
||||||
F2 |
1 |
1 |
a2 |
|
2 |
|
|
|
|
|
|
|
|
||
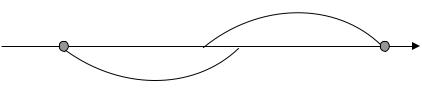
9. Отложить области значений F1 / F2 и a1 / a2 на числовой оси, как показано на рис. 4. Полученные интервалы значений должны заходить друг на друга в пределах погрешностей.
|
|
С2 – |
С2 |
|
|
|
|
С1 |
С2 |
||
С1 + С1 |
|
||
Рис. 4
КОНТРОЛЬНЫЕ ВОПРОСЫ И ЗАДАНИЯ
1.Дайте определение понятия системы отсчета;
2.Какие системы отсчета называются инерциальными, а какие неинерциальные?
3.Запишите преобразования Галилея;
4.В чем заключается суть принципа относительности Гали-
лея?
5.Что называют массой тела? Какой смысл вкладывают в по- нятие сила?
6.Перечислите основные виды взаимодействий, дайте им ха- рактеристики?
7.Сформулируйте три закона Ньютона. В каких системах от- счета они справедливы? Какова взаимосвязь между этими законами? Нельзя ли рассматривать первый закон Ньютона как следствие вто- рого?
8.Запишите II закон Ньютона для системы двух тел, подве- шенных на нити, перекинутой через блок (массой блока пренебречь);
9.Как в данной лабораторной работе компенсируют действие сил трения?
10.Дайте определения понятиям: прямолинейное движение, равномерное, равнопеременное.
11.Что называется скоростью, мгновенной, средней скоро-
стью?
12.Что называется ускорением, мгновенным, средним ускоре-
нием?
13.Какова цель данной лабораторной работы?
БИБЛИОГРАФИЧЕСКИЙ СПИСОК
1.Элементарный учебник физики: учеб. пособие: в 3 т. / под ред. Г. С. Ландсберга; Т. 1. Механика. Теплота. Молекулярная физи- ка. 12-е изд. М.: Физматлит, 2001.
2.Детлаф А. А. и др. Курс физики / А. А. Детлаф, Б. М. Явор-
ский. Т. 1. М.: Высш. шк., 1999.
3.Савельев, И. В. Курс общей физики / И. В. Савельев. Т. 1.
М.: Наука, 1998.
4.Трофимова, Т. И. Курс физики / Т. И. Трофимова. М.:
Высш. шк., 1998.
11 |
12 |