

Лабы / Лабораторная работа №6 / ДФВ_ЛР4 Лабораторная№6 калибровка МЭМС акселерометра
.pdfЛабораторная работа №4 Калибровка МЭМС акселерометра
1. Теоретические сведения
Акселерометр – датчик линейного ускорения, измеряет проекцию вектора кажущегося ускорения на ось чувствительности. Вектор кажущегося ускорения равен разности вектора абсолютного ускорения объекта и вектора ускорения свободного падения .
= −
Электронные акселерометры применяются для измерения линейных ускорений движущихся объектов, измерения параметров вибрации и ударных нагрузок, а также для измерения углов наклона.
Большое распространение получили электронные акселерометры,
изготавливаемые по поверхностной интегральной технологии. Форма представления выходного сигнала акселерометра может быть аналоговой или цифровой.
Погрешность показаний акселерометра включает в себя аддитивную составляющую (постоянное смещение), мультипликативную (изменение коэффициента передачи), а также случайную составляющую.
С целью компенсации погрешностей и получения наиболее близкого к истинному значения ускорения датчики ускорения калибруют. Процесс калибровки может осуществляться статически – в этом случае анализируется воздействие на датчик ускорения свободного падения. Для динамической калибровки применяются центрифуги и вибрационные стенды, позволяющие воспроизвести требуемые параметры ускорения.
1.2 Модель погрешности одноосевого акселерометра.
Цифровой код, формируемый на выходе одноосного акселерометра,
может быть представлен выражением (1):
|
|
|
= |
( + ) |
+ |
|
(1) |
|
|
|
|
|
0 |
|
|
|
|
где |
|
– коэффициент преобразования, |
|
= 1[ед. к⁄ |
]; |
|
||
|
|
|
|
|
|
|
||
0 |
– аддитивная погрешность измерения ускорения; |
|
|
|||||
|
|
– значение проекции |
действующего ускорения |
на ось |
||||
|
|
|
|
|
|
|
|
|
чувствительности датчика, = 1[ ];
– случайная составляющая погрешности выходного сигнала.
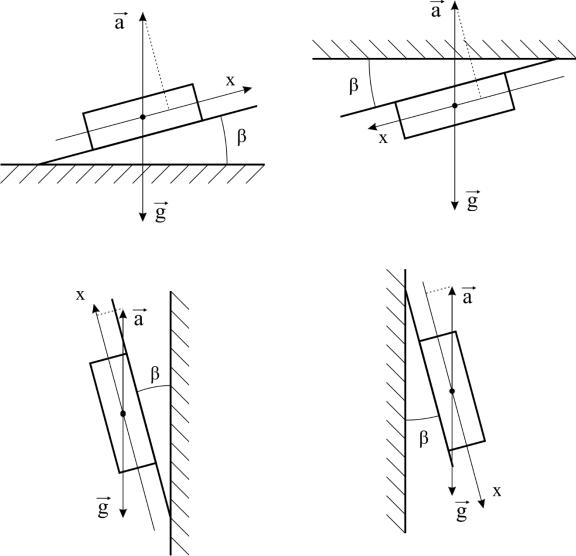
В общем случае между осью чувствительности акселерометра и вектором действующего ускорения может быть некоторый угол.
Распространенной причиной этого является погрешность установки датчика,
крен при пайке и т.д.
На рисунке 1 показаны примеры установки акселерометра на горизонтальном и вертикальном основании с малой погрешностью угла установки. Для приведенных на рисунках а) и в) примеров с учетом малости
значения проекции могут быть выражены следующими соотношениями (2), (3):
|
|
= | | ∙ cos ( |
|
− ) = ∙ sin( ) ≈ ∙ |
(2) |
||
1 |
|
||||||
|
|
|
2 |
|
|
||
|
|
|
|
|
|
||
|
|
|
3 |
= | | ∙ cos(β) = ∙ cos( ) ≈ |
(3) |
||
|
|
|
|
|
|
|
|
а) |
б) |
в) г)
Рисунок 1 – Ориентационные положения одноосевого акселерометра.
Методика калибровки одноосевого датчика
Используя приведенную модель погрешности, можно провести калибровку акселерометра. Калибровка проводится в статическом режиме, с
использованием ускорения свободного падения. В процессе калибровки ось чувствительности датчика устанавливается в 4 различных положения относительно направления действия ускорения свободного падения (см.
рисунок 1).
Случайная погрешность может быть скорректирована путем проведения серии экспериментов для каждого с последующим усреднением.
|
|
|
|
|
|
= |
3−4 |
|
|
|
|
(8) |
||
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
2 |
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
0 |
= |
3+ 4 |
= |
3+ 4 |
∙ |
2 |
= |
3+ 4 |
∙ |
(9) |
|||
2 |
|
2 |
|
3−4 |
3−4 |
|||||||||
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|||||
1.3 Модель погрешности трехосевого акселерометра.
При использовании трехосевого акселерометра показания каждого акселерометра включают:
1) значение проекции ускорения на ось чувствительности. Данное значение вносит вклад в формирование выходного значения N c
коэффициентом (1 + ). Где
− относительная погрешность коэффициента преобразования;
n – название оси чувствительности.
2) влияние проекций ускорения на другие оси координат объекта
∙ .
– коэффициент влияния поперечного ускорения;
n, m, l – названия осей чувствительности;
n – ось, для которой составляется выражение;
l – ось, относительно которой действует паразитная составляющая ускорения.
3)постоянное смещение оценки ускорения 0
4)случайная погрешность
Составляющие ускорения при формировании выходного значения умножаются на коэффициент преобразования:
= 1[ед. к.⁄ ];
Для трех осей система уравнений приобретает вид:
|
= |
[(1 + |
|
) |
+ |
− |
|
|
|
+ |
|
] + |
х |
|
(10) |
|||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
0 |
|
|
|
|
|
|||||||
|
= |
[− |
|
|
|
+ |
(1 + |
|
) |
|
+ |
|
+ |
|
] + |
|
(11) |
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
0 |
|
|
|
|
||||||
|
= |
[ |
|
|
− |
|
|
|
+ (1 + |
|
) |
|
+ |
0 |
] + |
|
|
(12) |
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
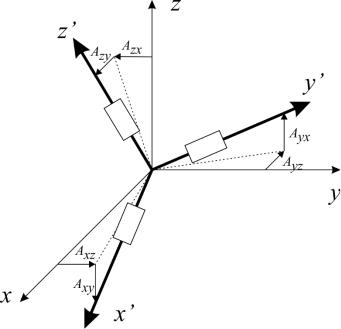
Знак коэффициентов влияния паразитных составляющих выбирается в соответствии с представлением о повороте осей чувствительности датчика относительно координатных осей объекта (Рисунок 2):
Рисунок 2 – Положение осей чувствительности датчика относительно координатных осей объекта.
Представим приведенную выше систему уравнений в матричной форме:
|
|
|
(1 + ) |
|
− |
|
|
|
|
|
х |
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
0 |
|
|
|||
|
|
|
|
|
|
|
|
|
||||
[ |
] = [ |
] ∙ ([ |
− |
(1 + ) |
|
|
] ∙ [ ] + [ 0]) + [ ] |
(13) |
||||
|
|
|
|
|
|
|
|
0 |
|
|
||
|
|
|
|
− |
(1 + |
) |
|
|
||||
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
Методика калибровки трехосевого акселерометра
Калибровка трехосевого датчика предполагает экспериментальное определение неизвестных параметров: , , , , 0 для всех осей чувствительности.
a) В положении О1 (см. Приложение А) проекции ускорения на оси чувствительности датчика принимают следующие значения:
= , = = 0.
С учетом этого выражение (10) принимает вид:
|
= |
|
[(1 + |
|
) + |
0 |
] |
+ |
(14) |
|||
1 |
|
|
|
|
|
|
|
|
х |
|
||
|
= |
|
[− |
+ |
0 |
] + |
(15) |
|||||
1 |
|
|
|
|
|
|
|
|
|
|
||
|
= |
[ |
+ |
0 |
] + |
|
|
(16) |
||||
1 |
|
|
|
|
|
|
|
|
|
|
||
В положении О2: = −, |
|
|
|
= |
= 0. |
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
= |
[−(1 |
+ |
|
) + ] |
+ |
(17) |
|||
2 |
|
|
|
|
|
|
0 |
х |
|
|
|
= |
[ |
|
+ |
0 |
] |
+ |
|
(18) |
|
2 |
|
|
|
|
|
|
|
|
||
|
= [− |
|
+ |
|
] + |
|
(19) |
|||
2 |
|
|
|
0 |
|
|
|
|||
Случайные погрешность |
|
|
|
исключаются путем |
усреднения |
||||||
|
|
|
|
|
|
|
|
|
|
|
|
результатов серии экспериментов. |
|
|
|
|
|
|
|||||
|
+ |
= 2 |
|
|
; |
|
|
|
|
|
|
1 |
2 |
|
0 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
+ |
|
|
|
|
|
|
|
= |
1 |
2 |
(20) |
|||
|
|
|
|
|
|
|
|||||
|
|
|
|
|
0 |
|
|
2 |
|
||
|
|
|
|
|
|
|
|
|
|||
|
− |
= 2 |
(1 + |
|
) ; |
|
|
|
|||
1 |
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
− |
|
||||
|
|
|
|
|
= |
|
|
|
|
1 |
2 |
− 1 |
(21) |
||
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
2 |
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
||||
Зная величину выражений (15) (18) определим степень влияния |
|||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
поперечной составляющей ускорения и смещения нуля по оси y. |
|
||||||||||||||
|
+ |
= 2 |
|
; |
|
|
|
|
|
|
|
|
|
||
1 |
2 |
|
|
0 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
+ |
|
|
|
|
|
|
|
|
|
|
|
|
= |
|
1 |
2 |
|
|
(22) |
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
0 |
|
|
2 |
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
− |
= 2 |
|
; |
|
|
|
|
|
|
|
|
|
||
2 |
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
− |
|
|
|
|||||
|
|
|
|
= |
|
2 |
|
1 |
|
|
(23) |
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
2 |
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|||||||
Аналогично для оси z: |
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
+ |
|
|
|
|
|
|
|
|
||
|
|
|
|
= |
|
1 |
2 |
|
|
(24) |
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
0 |
|
|
2 |
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
− |
|
|
|
|
|
|
|
|
|
|
|
|
= |
|
1 |
2 |
|
|
(25) |
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
2 |
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
б) В положении О3 (см. Приложение А) проекции ускорения на оси чувствительности датчика принимают следующие значения:
= , = = 0.
С учетом этого выражение (10) принимает вид:
3 = [ + 0] + х
3 = [(1 + ) + 0] +
3 = [− + 0] +
Для положения О4:
|
= |
|
[− |
+ |
|
] + |
|
||
4 |
|
|
|
|
0 |
х |
|||
|
= |
|
[−(1 |
+ |
|
) + |
] + |
||
4 |
|
|
|
|
0 |
|
|||
|
= |
[ |
+ |
|
] + |
|
|||
4 |
|
|
|
0 |
|
|
|
|
|
Аналогично расчетам, произведенным в перечислении а):
|
|
|
|
+ |
|||||||
|
= |
|
|
3 |
|
|
4 |
||||
|
|
|
|
|
|
|
|
|
|
||
0 |
|
|
|
2 |
|||||||
|
|
|
|
||||||||
|
|
|
|
|
|
− |
|||||
|
= |
|
|
3 |
|
4 |
− 1 |
||||
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
2 |
|||||||
|
|
|
|
||||||||
|
|
|
+ |
|
|
|
|
|
|||
|
= |
|
|
3 |
|
4 |
|||||
|
|
|
|
|
|
|
|
|
|
||
0 |
|
|
|
2 |
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
− |
|||||||
|
= |
|
|
3 |
|
|
4 |
||||
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
2 |
|||||||
|
|
|
|
||||||||
|
|
+ |
|
|
|
|
|
||||
|
= |
|
|
3 |
|
4 |
|||||
|
|
|
|
|
|
|
|
|
|
||
0 |
|
|
|
2 |
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
− |
|
|
|
|
|
||
|
= |
|
|
4 |
|
3 |
|||||
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
2 |
|||||||
|
|
|
|
||||||||
(26)
(27)
(28)
(29)
(30)
(31)
(32)
(33)
(34)
(35)
(36)
(37)
б) В положении О5 (см. Приложение А) проекции ускорения на оси чувствительности датчика принимают следующие значения:
= , = = 0.
С учетом этого выражение (10) принимает вид:
5 = [− + 0] + х
5 = [ + 0] +
5 = [(1 + ) + 0] +
Для положения О6:
6 = [ + 0] + х
6 = [− + 0] +
6 = [−(1 + ) + 0] +
Аналогично расчетам, произведенным в перечислении а):
|
|
|
|
+ |
|||||||
|
= |
|
|
5 |
|
|
6 |
||||
|
|
|
|
|
|
|
|
|
|
||
0 |
|
|
|
|
2 |
||||||
|
|
|
|
|
|||||||
|
|
|
|
− |
|||||||
|
= |
|
|
5 |
|
|
6 |
|
|
− 1 |
|
|
|
|
|
|
|
|
|||||
|
|
|
|
2 |
|||||||
|
|
|
|
||||||||
|
|
|
|
|
+ |
||||||
|
= |
|
|
5 |
|
6 |
|||||
|
|
|
|
|
|
|
|
|
|
||
0 |
|
|
|
|
2 |
||||||
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
− |
||||
|
= |
|
|
|
6 |
5 |
|||||
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
2 |
|||||||
|
|
|
|
||||||||
|
|
|
|
|
|
+ |
|||||
|
= |
|
|
5 |
|
6 |
|||||
|
|
|
|
|
|
|
|
|
|
||
0 |
|
|
|
|
2 |
||||||
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
− |
||||
|
= |
|
|
|
5 |
6 |
|||||
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
2 |
|||||||
|
|
|
|
||||||||
(38)
(39)
(40)
(41)
(42)
(43)
(44)
(45)
(46)
(47)
(48)
(49)