

Обобщенная структура микропроцессорной информационной измерительно-управляющей системы. Схемы построения многоканальных измерительных систем.
ИИУС–совокупность функционально объединенных измерительных, вычислительных и других вспомогательных тех.средств, для получения измерительной информации, ее преобразования и обработки для представления потребителю.
В настоящее время применяться встроенные микропроцессорные ИИУС (интегрированные в оборудование).
В одном изделии можно объединять рабочий орган механизма, силовой преобразователь, источник питания, устройство управления, измерит. датчики.
Системы могут быть однопроцессорными или двухпроцессорными одноуровневыми или многоуровневыми.
Многоуровневые системы: нижний уровень – задача управления, контроля отдельными элементами оборудования; следующий уровень– совместное управление в реальном масштабе времени (связь с оператором, обмен с системой верхнего уровня); средний уровень выполнен в отдельном конструктиве в виде стойки или блока (промышленные компьютеры и контроллеры).
Промышленные компьютеры имеют развитой набор устройств сопряжения с объектом, у контроллера имеется специализированное ПО.
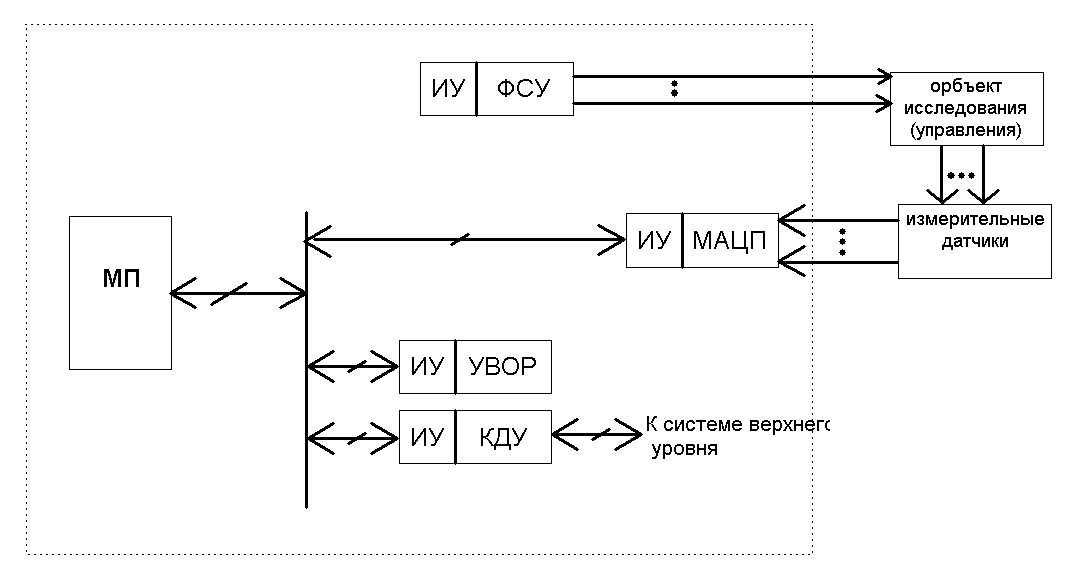
ИУ – интерфейсное устройство. ФСУ – формирователь сигналов управления. УВОР – устройство ввода отображения и регистрации. КДУ – контроллер удаленного доступа. МАЦП – многоканальный АЦП.
Основные функции МП: 1. управление всеми устройствами из состава системы
2. прием и обработка данных от МАЦП
3. формирование сигналов управления в соответствии с заданным законом управления
4. связь с человеком оператором (обслуживаемая система)
5. связь с удаленными объектами
Для определения состояния сложного объекта используют многоканальные измерения.

ФП - физический параметр. Д-датчик. УС - устройство согласования. АК- аналоговый коммутатор. СВХ – схема выборки хранения.
УС выполняет функции масштабирования, фильтрации, безинерционное нелинейное преобразование с датчиков.
Масштабирование – приведение динамического диапазона выходного сигнала датчика к динамическому диапазону АЦП.
Фильтрация – обеспечивает согласование спектра сигнала с датчика с АЧХ измерительного канала (ширина спектра помехи значительно шире спектра полезного сигнала).
Безинерционное нелинейное преобразование– если датчик нелинеен то УС может выполнять функции компенсации нелинейности датчика.
АК обеспечивает передачу на общий выход одного из входных сигналов.
СВХ формирует мгновенное значение входного сигнала в момент выборки tj , хранит выбранное значение на время необходимое для его преобразования в цифровой код.
Типовой режим работы такой системы – кадровый ввод вывод. При этом МП через равные промежутки времени подключает сигнал с i-ого датчика к АЦП. Через m интервалов ввода формируется массив измерений по одному измерению для каждого канала – кадр.
Погрешность – прямое сопротивление АК.
Многоканальная ИИУС на базе цифрового мультиплексора.

Достоинства: Более высокое быстродействие.
Недостатки: более сложное аппаратное строение.
Двухуровневая ИИУС

Микроконтроллеры: назначение, особенности архитектуры. Типовые периферийные устройства.
Функциональная схема контроллера C167

Микроконтроллеры серии 80C16X разработаны на базе универсального 16 разрядного RISС процессора (имеет сокращенную систему команд, которые имеют одинаковую длину и выполняются за одинаковое время) с четырехcтупенчатым конвейером. Серии 80C167, 80C164, 80C163, 80C161 отличаются набором периферийных блоков, типом корпуса и наличием соответствующего количества портов ввода-вывода.
Для увеличения скорости выполнения команд контроллеры семейства С166 содержат 4-х ступенчатый конвейер команд. За один машинный цикл C166 на различных ступенях конвейера выполняет одновременно до 4 команд. Это означает, что обработка каждой команды по времени длится четыре машинных цикла, хотя выполнение команды происходит в течение одного цикла. Таким образом, конвейеризация имеет существенные преимущества для ускорения выполнения последовательности команд при достаточной пропускной способности шины. Время исполнения большинства команд составляет 100 нс при тактовой частоте 20МГц.

PEC – Контроллер периферийных событий - Peripheral Events Controller (PEC) освобождает ЦПУ от простых, но частых обслуживаний прерываний, осуществляя перенос данных в любую позицию нулевого сегмента без переключения задачи. Процесс переноса данных практически не затрагивает работу контроллера и не зависит от выполняемой программы - контроллер только приостанавливает выполнение текущей программы на один цикл (100 нс), даже не сохраняя свое состояние в стеке. Время отклика контроллера для обслуживания PEC составляет от 150 до 450 нс при цикле ЦПУ 100 нс. Для контроллера PEC отведены два верхних уровня приоритета, что позволяет обслуживать одновременно 8 каналов PEC. Каждый канал управляется собственным регистром PEC, который позволяет программировать передачу байта или слова данных с инкрементом адреса или без него с однократным, многократным или бесконечным числом пересылок. Обработка прерываний контроллером PEC выполняется в соответствии с приведенной диаграммой.
P1-P8 – параллельные порты .Для обработки или генерации одиночных внешних сигналов управления или данных 80C167 обеспечивает до 111 параллельных каналов ввода/вывода (В/В), которые организованы следующим образом: один 16-битовый порт ввода/вывода (Port2), восемь 8-битовых портов ввода/вывода (Port0 состоит из P0H и P0L, Port1 состоит из P1H и P1L, Port4, Port6, Port7, Port8), один 15-битовый порт ввода/вывода (Port3) и один 16-битовый порт ввода (Port5).
ASC–асинхронно синхронный последовательный контроллер. Асинхронный / синхронный Последовательный Интерфейс ASC обеспечивает последовательную связь между C167 и другими микроконтроллерами, микропроцессорами или внешними периферийными устройствами.
SSC–синхронный последовательный контроллер.
CAPCOM1,CAPCOM2 – C167 обеспечивает работу двух в основном идентичных модулей захвата/сравнения (CAPCOM), которые различаются лишь способом подключения к выводам C167. Они предоставляют 32 канала, которые взаимодействуют с четырьмя таймерами. Модули CAPCOM могут захватывать содержимое таймера при возникновении определенных внутренних или внешних событий. Они также могут сравнивать значение таймера с заданными значениями и изменять выходной сигнал в случае совпадения. С помощью описанных возможностей каждый из них поддерживает генерацию и управление временных последовательностей на нескольких (до 16) каналах с минимальным программным вмешательством.
ADC– Представляет собой преобразовательное устройство состоящее из 16-канального аналогового коммутатора (АК) и 10-разрядного АЦП поразрядного уравновешивания среднего быстродействия. Программная модель:
P5 |
ADDAT |
ADCON |
|
ADDAT2 E |
ADCIC |
|
ADEIC |
ADDAT – регистр результатов.ADDAT2E – регистр результатов в режиме преобразования с выбранным каналом
ADCON – регистр управления.ADCIC – регистр управления прерываниями.ADEIC – регистр управления прерываниями, но он используется для анализа ситуации переполнения, а также в режиме с выбранным каналом.
OSC– тактовый генератор.
WDT – сторожевой таймер - это средство повышения надежности работоспособности системы в условиях аппаратных сбоев. Это таймер который отсчитывает некоторую паузу и производит программный сброс МК. Для того чтобы WDT не производил сброс системы в программе должны присутствовать команды обслуживания сторожевого таймера (SPVWDT-обслуживание, DISWDT-запрет).
GPT1, GPT2 – блоки таймеров общего назначения. В GPT1 входят три 16 разрядных таймера (Т1,Т2,Т3). В GPT2 входят два 16 разрядных таймера с большим разрешением чем таймеры в GPT1 (Т4,Т5).
PWM – широтно-импульсный модулятор предназначен для формирования нескольких независимых импульсно-модулированных сигналов.
BUS CTL – контроллер шины.