

Оглавление
Теория автоматического управления 5
1. Принципы управления. Классификация САУ. 5
2. Объект управления. Алгоритмы и законы регулирования. 7
3. Математическое описание САУ. Модели вход-выход. 8
4. Типовые воздействия в САУ и реакции на них. 9
5. Математическое описание типовых звеньев САУ. 12
6. Соединения звеньев САУ. Математическое описание соединений линейных звеньев САУ. 13
7. Многомерные САУ. Модели вход-выход многомерных линейных САУ. 15
8. Математическое описание САУ в пространстве состояний. 16
9. Постановка задач анализа и синтеза САУ. 17
10. Понятие устойчивости САУ. Условие устойчивости линейных САУ. 18
11. Устойчивость линейных САУ. Алгебраические критерии устойчивости. 19
12. Устойчивость линейных САУ. Частотные критерии устойчивости. 20
13. Определение устойчивости замкнутой САУ по частотным характеристикам разомкнутой САУ. Запасы устойчивости по фазе и по усилению. 22
14. Критерии качества САУ. 23
15. Временные показатели качества переходных процессов в линейных САУ. 24
16. Частотные показатели качества переходных процессов в линейных САУ. 25
17. Интегральные критерии качества переходных процессов в САУ. 26
18. Качество установившихся процессов в линейных САУ. Коэффициенты ошибок. 27
19. Коррекция САУ. Способы коррекции линейных САУ. 30
20. Разновидности корректирующих обратных связей в линейных САУ. 31
21. Точность линейных САУ при случайных стационарных входных воздействиях. 32
22. Понятие и условия инвариантности линейных САУ. Комбинированное управление по задающему воздействию. 33
23. Понятие и условия инвариантности линейных САУ. Комбинированное управление по возмущающему воздействию. 34
24. Основные свойства линейных САУ. Чувствительность. 35
25. Основные свойства линейных САУ. Управляемость. 37
26. Основные свойства линейных САУ. Наблюдаемость. 38
27. Дискретные САУ. Классификация дискретных САУ. 39
28. Математическое описание линейных дискретных САУ. 41
29. Основные понятия и особенности нелинейных САУ. Классификация нелинейностей. Типовые нелинейности. ПЕРЕПРОВЕРИТЬ 42
30. Методы линеаризации нелинейных САУ. 44
Электротехника и электроника 47
1. Чистые и примесные полупроводники, формирование p-n перехода. 47
2. Стабилитрон. ВАХ стабилитрона. Параметрические стабилизаторы напряжения: устройство, принцип действия. 50
3. Схема двухполупериодного выпрямителя с выводом от средней точки трансформатора, принцип действия, диаграммы работы. 52
4. Мостовая схема двухполупериодного выпрямителя: принцип действия, диаграммы работы. 53
5. Компенсационные стабилизаторы напряжения непрерывного действия, схема, принцип действия. 54
6. Р-n-p и n-p-n транзисторы, устройство, принцип действия биполярного транзистора. 56
7. Усилительный каскад, собранный по схеме с общим эмиттером (ОЭ): схема, назначение элементов, расчет входного сопротивления, коэффициентов усиления Кр, Ku, Ki. 58
8. Усилительный каскад, собранный по схеме с общим коллектором (ОК): схема, назначение элементов, расчет входного сопротивления, коэффициентов усиления Кр, Ku, Ki. 59
9. Полевой транзистор с p-n переходом: устройство, принцип действия, ВАХ. 60
10. Усилительный каскад, собранный на полевом транзисторе по схеме с общим истоком (ОИ), назначение элементов. 62
11. МОП (МДП) транзисторы со встроенным каналом: устройство, принцип действия, ВАХ. 64
12. Виды межкаскадных связей. Непосредственная и емкостная связь: схемы, достоинства, недостатки. 67
13. Виды межкаскадных связей. Трансформаторная и оптическая связь: схемы, достоинства, недостатки. 68
14. Усилители мощности в режимах «А», «В»: схемы, достоинства, недостатки. 69
15. Усилители мощности в режимах «C», «D»: схемы, достоинства, недостатки. 71
16. Ключевой режим работы биполярного транзистора: схема с общим эмиттером (ОЭ), диаграммы работы. 73
17. Мультивибраторы: типовая схема на таймере 1006 ВИ1, диаграммы работы, расчет элементов. 75
18. Двухтактный усилитель мощности: устройство, принцип действия, диаграммы работы. 76
19. Операционные усилители: инвертирующий и неинвертирующий усилитель. 77
20. Операционные усилители: повторитель напряжения, сумматор. 79
Метрология и измерительная техника 81
1. Погрешности измерений: абсолютная, относительная, приведенная. Аддитивная и мультипликативная погрешность, полоса распределения. 81
2. Нормирование погрешностей средств измерения. 83
3. Случайная погрешность измерения. Законы распределения, доверительный интервал. 85
4. Магнитоэлектрические омметры, особенности измерения больших и малых сопротивлений. 87
5. Мосты постоянного и переменного тока, области применения, схема, условие баланса. 89
Цифровые устройства автоматики и вычислительной техники 91
1. Логические элементы. Параметры логических элементов. 91
2. Серии интегральных схем логических элементов. Типы выходных каскадов. 93
3. Типовые комбинационные схемы. Назначение, принципы построения, примеры использования. 95
4. Триггеры. Разновидности и логика работы триггеров. Динамические и статические входы триггеров. 97
5. Регистры: классификация, принципы построения, выполняемые функции, примеры использования. 99
6. Счетчики: назначение, классификация, принципы построения, режимы работы примеры использования. 101
7. Полупроводниковая память: назначение, классификация. Временные диаграммы работы ЗУ. 102
Вычислительные машины, системы и сети 105
1. Представление информации в ЦВМ и ВС. 105
2. Принцип работы ЭВМ. Программная модель универсального микропроцессора. Сегментация памяти. 108
3. Система памяти ЭВМ. Особенности памяти типа СТЕК. Назначение и принцип действия КЭШ-памяти. 111
4. Система команд универсального микропроцессора. 114
5. Видеосистема компьютера. 116
6. Обмен информацией между процессором, памятью и внешними устройствами. 119
7. Интерфейсы ввода-вывода: определение, классификация. Внутренний интерфейс. Примеры реализации. 121
8. Интерфейсы ввода-вывода: определение, классификация. Внешний интерфейс. Примеры реализации. 124
Программно-логическое управление в микропроцессорных системах 127
1. Классификация и особенности архитектуры современных микропроцессоров. 127
2. Обобщенная структура микропроцессорной информационной измерительно-управляющей системы. Схемы построения многоканальных измерительных систем. 129
3. Микроконтроллеры: назначение, особенности архитектуры. Типовые периферийные устройства. 131
4. Программируемые логические контроллеры: назначение, классификация, типовые функции. 133
5. Системы программирования на языках МЭК. 135
Программирование и основы алгоритмизации 137
1. Поколения языков программирования. Уровни языков программирования. 137
2. Трансляторы: назначение, классификация, примеры. Этапы прохождения программ на ЭВМ. Результаты, формируемые каждым этапом. 138
3. Жизненный цикл программного обеспечения. Составляющие процесса жизненного цикла программного обеспечения. Каскадная (водопадная) модель жизненного цикла программы. 139
4. Типизация данных. Система типов в языке программирования высокого уровня. 140
5. Технология программирования вычислительных задач (модульное и структурное программирование). Пример использования. 142
6. Типовые алгоритмы, используемые в программировании. Средства реализации типовых алгоритмов в языке программирования высокого уровня. 143
7. Организация ввода-вывода. Средства работы с файлами в языке программирования высокого уровня. 145
8. Понятие подпрограммы. Виды подпрограмм, их отличительные особенности. Способы передачи параметров. 147
9. Динамические переменные. Операция разыменования. Размещение/освобождение динамических переменных. 149
10. Модуль и его структура. Основные типы модулей в инструментальной среде разработки программного обеспечения на языке высокого уровня. 151
11. Фундаментальные принципы объектно-ориентированного программирования. Понятие класса, объекта. Реализация класса в языке программирования высокого уровня. 153
Информационные сети и телекоммуникации 155
1. Понятие о способах коммутации в распределенных вычислительных системах (коммутация каналов, коммутация пакетов). 155
2. Структуры распределенных вычислительных систем (топология, физические и логические элементы сетей ЭВМ). 157
3. Модель взаимодействия открытых систем (Open Systems Interconnection, OSI). 160
4. Стек протоколов TCP/IP. 162
5. Виртуальная локальная сеть. 165
6. Коммутируемый Ethernet (коммутаторы). 166
7. Протокол связующего дерева (Spanning Tree Protocol, STP). 167
8. Модуляция. Виды модуляции. Частотный спектр сигнала (понятие). 167
9. Понятие IP адреса и маски сети. 172
10. DHCP (Dynamic Host Configuration Protocol) – протокол динамической конфигурации хостов. 173
11. ARP (Address Resolution Protocol) – протокол разрешения адресов. 175
12. ICMP (Internet Control Message Protocol) – протокол межсетевых управляющих сообщений. 176
13. Фрагментация пакетов (назначение, способ реализации). 177
Вопросы для подготовки к гэ направление обучения – утс Теория автоматического управления
Принципы управления. Классификация сау.
Существует фундаментальный принцип управления. У каждой системы есть алгоритм функционирования. Мы формируем алгоритм управления (формирование управляющего воздействия на ОР). Существует 3 принципа управления:
принцип разомкнутого управления
принцип компенсации или управления по возмущению
принцип о.с. или регулирования по отклонению
комбинированный способ – различные комбинации предыдущих.
Принцип разомкнутого управления
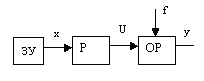
Алгоритм управления вырабатывается только на основе заданного алгоритма функционирования, при этом не контролируется не возмущения не выходные параметры.
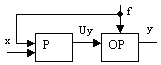
Принцип регулирования по отклонению

Если сигнал о.с. формир. только при изменении выходной переменной, то такая о.с. наз. гибкой. Если сигнал, подаваемый на вход системы пропорционален только значению выходной переменной, то это жесткая о.с. (стабилизация U генератора постоянного тока).В расмотренном примере существует ЖОС. Когда на систему действует возмущающее воздействие, то организуется принцип управления по возмущению(в дизель-генераторах).
При реализации принципа управления по возмущению добиваются инвариантности – нечувствительности к возмущению.
Управление по отклонению обычно наз. регулированием. Y=G(заданное значение) при наличии f – задача автоматического рег-ия. В зависимости от характера изменения задающего воздействия САР делятся на 3 вида:
Системы стабилизации – они задают воздействия постоянно.
Системы программного регулирования – G=F(z) – задающее воздействие изменяется по заранее заданному закону.
Задающее воздействие определяет заданное значение выходной величины. Заданное значение может быть либо постоянным либо переменным во времени.
Следящие системы – G = var – задающее воздействие изменяется, но закон изменения заранее не известен.
В зависимости от характера действующего в системе сигнала: непрерывные, дискретные.
В зависимости от стабильности параметров во времени: стационарные, нестационарные, детерминированные.
В зависимости от уравнения системы: линейные, нелинейные. В зависимости от рода используемого сигнала: электронные, пневматические, гидравлические, электромеханические и т.д.
Системы м.б. одномерными (системы с одним входом и одним выходом) и многомерными.
Объект управления. Алгоритмы и законы регулирования.
Система состоит из регулятора и объекта регулир-я. Регулятор формирует упр. возд-е на объект регул-я.
Совокупность предписаний, по которым формируется управляющее воздействие на объект регулирования назыв. законом регулирования (управления) – алгоритмы управления.
Математически закон управления определяется уравнением регулятора.

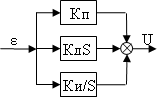
U=f(ε)-закон рег-я
Различают П(пропорциональный), И(интегральный) и Д (дифференциальный)– законы управления.
Uп= kE
Uи=k
Uд=kdE/dt
Обобщенная структура ПИД – регулятора.
Математическое описание сау. Модели вход-выход.
Для решения задач САУ (анализ системы или синтез системы) нужно получить математическое описание системы (математическую модель системы) – дифференциальное уравнение физического закона.
Получение модели начинается с разбиения системы на звенья направленного действия - передают сигнал в одном направлении, и изменение звена не влияет на состояние предшествующего звена, работающего на его вход. Разбиение системы на звенья производится исходя из простоты их дифф. уравнений (не выше 2 порядка). Затем для каждого звена составляется передаточная функция.
Математическое описание системы – это либо система из n дифференциальных уравнений 1 порядка, либо дифференциальное уравнение n порядка. После составления диффер. ур-ния на основании преобразования Лапласа составляют передаточную функцию.

Или в операторном виде через преобразование Лапласа: A(s)Y(s)=B(s)X(s)
Ф(s)=Y(s)/X(s)=B(s)/A(s) – передаточная функция (описание в системе вход – выход)


Δy=k*Δx
Если использовать преобр-е Лапласа, то получим передат. ф-цию.
W(s) = Y(s)/X(s)
Схема, составленная из звеньев направленного действия, называется структурно-динамической – составляется на основании передаточных функций каждого звена.