

Вопрос 3. Нечеткое управление роботами
Разработка средств и методов нечеткого управления многозвенными механическими системами представляет не только чисто теоретический, но и практический интерес в целях создания нового поколения манипуляционных роботов с развитыми интеллектуальным возможностями. В этом смысле выбор объекта управления должен отражать специфические особенности устройств, реально используемых в робототехнике. Такому требованию в полной мере отвечает трехстепенной манипулятор с планарно-ангулярной кинематической схемой (рис. 6), положенной в основу конструкций многих типов роботов.
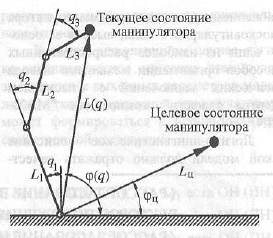
Рис. 6. Кинематическая схема трехстепенного планарно-ангулярного
манипулятора
Избыточность подобных кинематических структур позволяет обеспечить повышенный уровень манипуляционных возможностей, реализация которых на основе традиционных математических методов приводит к созданию сложного программно-алгоритмического обеспечения.
Одна из интересных постановок задачи управления движением манипуляторов заключается в формировании специализированных моделей, устанавливающих взаимосвязь между пространственным состоянием манипулятора и относительными положениями его звеньев. При этом относительные положения звеньев манипулятора характеризуются вектором обобщенных координат (или их приращений), выступающих в роли управляющих параметров, а состояние манипулятора задается в инерциальной системе координат. Так, исходя из значения полярных координат, будут определять величину и наклон соответствующего вектора положения кинематической цепи, а контролируемые рассогласования этих параметров для текущего и целевого состоянии манипулятора служить конструктивной основой при формировании соответствующего критерия управления:
Система подобных представлений позволяет обеспечить максимальную наглядность в описании движений манипулятора плоскоангулярной кинематической структуры на уровне изменений контролируемых параметров его текущего состояния под влиянием управляющих воздействий.
Анализ подвижности трехстепенного манипулятора, выбранного в качестве исследуемого объекта управления, приводит к следующим выводам:
приращение первой обобщенной координаты обусловливает изменение только углового рассогласования векторов текущего и целевого положений манипулятора;
приращение второй и третьей обобщенных координат обусловливает изменение рассогласований как величин, так и направлений векторов текущего и целевого положений манипулятора;
постановка задачи управления движением манипулятора может быть сведена к минимизации рассогласований величин и направлений векторов его текущего и целевого положений путем независимого изменения отдельных обобщенных координат кинематической цепи.
Результаты проведенного анализа позволяют приступить к синтезу модели нечеткого управления целенаправленным движением трехстепенного манипулятора плоскоангулярного типа, выбрав за основу один из наиболее распространенных способов организации механизма вывода логических заключений с отысканием "центра тяжести" композиции "MAX-MIN".
Логико-лингвистическое описание такой модели должно отражать качественную постановку рассматриваемой задачи, формулируемую в виде набора продукционных правил. Запись отдельных правил, которые устанавливают взаимосвязь между основными содержательными понятиями, используемыми для описания модели, осуществляется с помощью соответствующих лингвистических переменных. Исходный состав базового терм-множества, объединяющего возможные значения выбранных лингвистических переменных, должен обеспечивать смысловую ясность и полноту создаваемой системы правил.
С точностью до характеристик модальности этому требованию в полной мере отвечает следующая совокупность четырех качественных категорий:
{"Нулевое" (Н), "Малое" (М), "Среднее" (С), "Большое" (Б)}.
При этом модальность той или иной категории для каждого понятия может быть специфицирована с помощью дополнительных лингвистических оценок: "Положительное" (П) и "Отрицательное" (О).
Простейшая модель нечеткого управления манипулятором строится в виде совокупности трех независимых односвязных контуров, каждый из которых контролирует изменение одной из обобщенных координат. Ее конструктивно-идеологическая основа базируется на естественном предположении о необходимости пропорционального уменьшения приращений обобщенных координат отдельных звеньев по мере приближения текущего положения кинематической цепи к ее заданному пространственному состоянию.
Описание такой модели предполагает одноименное сочетание лингвистических значений входных и выходных переменных, используемых при формировании соответствующих продукций. Возможные варианты построения системы правил связаны с выбором необходимого количества термов из числа их базового набора. Последующая интерпретация сформированного логико-лингвистического описания на уровне его физического смысла обеспечивается за счет сопоставления отдельных термов реальным диапазонам изменения параметров модели управления. Подобная конкретизация осуществляется с помощью функций принадлежности, задающих достоверность попадания конкретных значений того или иного параметра в некоторую качественную категорию. Расстановка функций принадлежности вдоль осей изменения параметров должна подчиняться определенным правилам, выполнение которых в конечном итоге обеспечивает необходимый характер синтезируемого управления. Так, в частности, результаты проведенных исследований специфики нечеткого логического вывода в односвязных моделях показывают, что выбор наклона функций принадлежности крайних термов выходной лингвистической переменной определяет границы реально достижимого диапазона изменения управляющего параметра от минимального до максимального значений.
В самом элементарном случае логико-лингвистическое описание взаимосвязи входных и выходных параметров модели нечеткого управления манипулятором может формироваться с использованием единственной категории:
Интерпретация такого описания на уровне функций принадлежности не допускает многозначных толкований и показана на рис. 7.
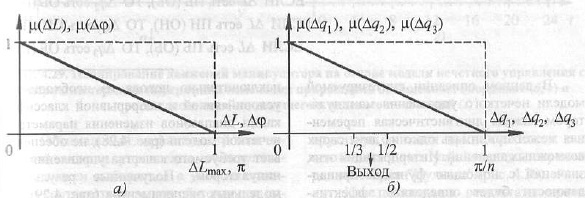
Рис. 7. Входные (а) и выходные (б) функции принадлежности модели нечеткого управления манипулятором, построенной с использованием одиночных термов
(n= 20 - масштабный коэффициент)
Построенная модель нечеткого управления манипулятором принципиально не может обеспечить хорошего качества функционирования в силу специфики преобразований, задающих жесткие ограничения на диапазон изменения выходного параметра. Следует отметить, что полученные результаты свидетельствуют о правильности общего подхода к организации средств интеллектуального управления целенаправленным движением плоскоангулярного манипулятора с применением методов нечеткой логики.
Компенсация недостатков упрощенной модели нечеткого управления манипулятором предполагает развитие ее логико-лингвистического описания за счет конкретизации качественных взаимосвязей входных и выходных параметров с помощью дополнительной лингвистической категории. В данном описании синтезируемой модели нечеткого управления манипулятором каждая лингвистическая переменная может принимать одно из двух своих возможных значении. Интерпретация этих значений с помощью функций принадлежности будет определять эффективность настройки модели на конкретное качество ее функционирования.
Обобщение полученных результатов позволяет сформулировать ряд принципиально важных выводов:
аппарат теории нечетких множеств и построенная на ее основе логика обусловливают возможность формирования простых и функционально эффективных моделей для управления движением манипуляционных роботов, в том числе и с избыточной кинематической структурой;
обеспечение требуемого качества функционирования и компактности создаваемых моделей нечеткого управления предполагает необходимость их предварительной настройки, выполнение которой должно осуществляться не только исходя из глубокого понимания смысловой постановки решаемой задачи, но и с учетом специфики и характера механизма логических преобразований;
предложенный подход к построению моделей нечеткого управления манипуляционными роботами на основе независимых односвязных контуров регулирования отдельных обобщенных координат кинематической цепи на практике доказал свою работоспособность и может применяться для более сложных конструктивных схем.
Использование методов нечеткой логики для управления манипуляторами в среде с препятствиями. Одной из типовых задач управления роботами является обход препятствий. Перспективный путь решения этой задачи - использование принципов интеллектуального управления на основе современных технологий обработки знаний. Такой подход предполагает создание иерархической управляющей структуры (рис.8), верхний уровень которой должен отвечать за своевременную выдачу целеуказаний, реализуемых на нижнем. При этом выбор величин и направлений и командных перемещений манипулятора должен производиться исходя из условий предотвращения столкновений с объектами (в том числе и подвижными) внешней среды. Эффективным средством процедуры принятия решений, запускаемой по результатам предварительной оценки текущей ситуации, являются методы и технологии нечеткой логики.
Следует отметить, что предложенный вариант нечеткого управления движением робота с уклонением от подвижного препятствия иллюстрирует общий подход к организации целесообразного поведения сложных технических систем, предназначенных для работы в условиях динамически изменяемой сцены. Так, в частности, логико-лингвистическая модель управления движением робота в направлении к подвижной цели может быть построена по аналогии с представленной схемой. Объединение обоих решений позволит обеспечить создание многофункциональной системы управления, селектирующей вариации внешней среды и действующей по принципу "свой - чужой".
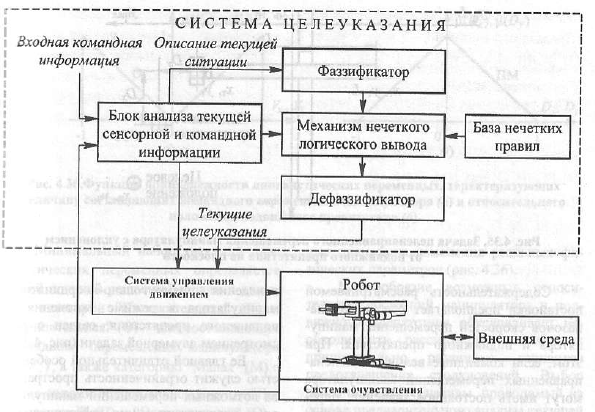
Рис. 8. Обобщенная структура системы интеллектуального управления
манипуляционным роботом
Очевидно, что применение подобных моделей поведения не ограничивается примером двухстепенного манипулятора с прямоугольной системой координат. Решение задач управления объектами иных типов и назначения предполагает модификацию базы нечетких правил с учетом конструктивных и функциональных особенностей каждого конкретного объекта.