

Вопрос 3. Искусственный интеллект в робототехнике
Современная робототехника началась с промышленных роботов в середине прошлого столетия. Первые роботы имели простое числовое программное управление, заимствованное вместе с приводами у станкостроения. Для промышленного применения это было возможно благодаря предельной детерминированности условий промышленного производства. Однако уже вскоре, когда робототехника стала распространяться на другие области с большей неопределенностью и изменчивостью внешних условий, от программного управления пришлось перейти к управлению от человека-оператора, дополнив программное управление супервизорным управлением. Дальнейшее развитие способов управления роботов показано на рис. 6. На рис.6 показано, что следующим этапом стало очувствление роботов и развитие на этой основе систем адаптивного управления с применением в дальнейшем методов искусственного интеллекта (ИИ). Последние помимо управления получили применение и для выполнения других функций роботов от обработки сенсорной информации и формирования моделей внешней среды до интерфейса с оператором.

Рис. 6. Развитие систем автоматического управления роботами
В робототехнике предполагается использовать методы искусственного интеллекта, в первую очередь, методы работы с информацией, основанные на оперативном использовании знаний. Дальнейшая перспектива – это техническое освоение неформализуемых творческих способностей человека и дополнение ими методов искусственного интеллекта, т.е. создание «искусственного разума». Это означает полноценное воспроизведение в конкретных прикладных областях умственных способностей человека, реализуемых двумя полушариями головного мозга – левым, где сосредоточено логическое мышление, и правым, ответственным за творческие способности человека.
Системы интеллектуального управления, конечно, существенно расширяют возможности роботов в отношении освоения все более сложных операций. Однако интеллектуальный робот все равно требует постоянного надзора со стороны человека особенно в связи с возможностью возникновения нештатных и аварийных ситуаций. Он не может достаточно длительное время функционировать автономно в нестационарной среде, поскольку все его действия строго формализованы, а в этих условиях обязательно требуется интуиция, творческий подход. Таким образом, переход от искусственного интеллекта к искусственному разуму означает качественно новый этап в робототехнике, создание нового поколения роботов – роботов разумных, в которых интеллект сочетается с творчеством.
На рис. 7 приведена функциональная схема интеллектуального робота. Главным и обязательным его компонентом является наличие развитой памяти – основы осмысленных действий робота и уровня его разумности. Блок памяти двусторонне связан с другими системами, перерабатывающими информацию, и включает базу знаний о внешней среде в виде ее модели и базу данных об этой среде, самом роботе и об операциях, которые он может выполнять.
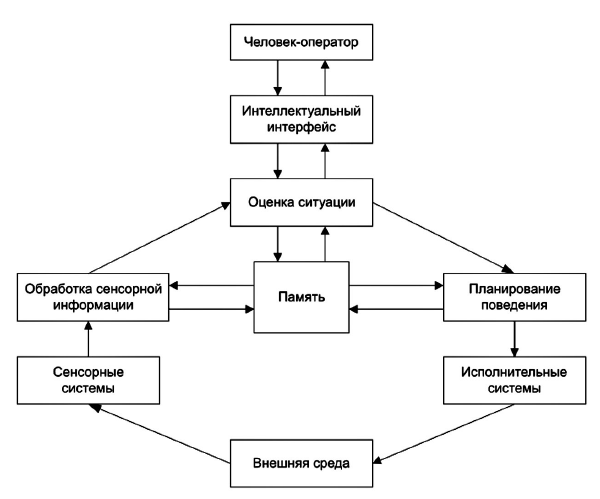
Рис. 7. Функциональная схема интеллектуального робота
Кроме того, специализированные оперативные базы знаний и данных, связанные с центральной памятью, могут находиться и в отдельных системах робота. База знаний о внешней среде содержит априорную информацию, вводимую до начала работы, и оперативную сенсорную информацию, которая приобретается в процессе восприятия окружающей среды при выполнении роботом различных действий, а также в процессе его специальных познавательных действий для изучения этой среды. Сама информация включает описание геометрических и других физических характеристик объектов среды и их взаимосвязей. Это описание имеет иерархическую структуру в виде уровней последовательного обобщения исходной информации. Например, описание рабочей зоны манипулятора включает набор планов этой зоны и ее частей, различающихся как масштабом и соответственно точностью, так и степенью обобщения первичной сенсорной информации (выделение контуров, поверхностей, объектов, групп объектов, определение различных свойств и физико-химических параметров этих объектов и т.д.). Введение в эти планы времени как параметра дает картину внешней среды в динамике с учетом взаимодействия ее объектов друг с другом и с роботом. База знаний о внешней среде содержит также правила, позволяющие моделировать возможные изменения этой среды.
Все другие блоки схемы также имеют иерархическую структуру, уровни которой соединены друг с другом по вертикали снизу вверх в направлении обобщения информации. В свою очередь, показанные на схеме соединения блоков в общем случае осуществляются многоканально в виде соединений между одноименными уровнями по горизонтали.
Блок обработки сенсорной информации получает из блока памяти экстраполяцию изменений состояний внешней среды, а передает в него коррекцию этого состояния на уровне непосредственной сенсорной картины среды.
Блок оценки ситуации и блок планирования поведения получают из блока памяти текущую модель внешней среды, а передают в него соответственно ее оценку по определенным критериям и синтезированный план управления движением робота в соответствии со стоящими перед роботом задачами.
В задачу блока оценки ситуации входит также оперативная корректировка целей управления и их приоритетов. Это верхний уровень в иерархии управления роботом.
Блок интерфейса в общем случае может быть двусторонне связан со всеми перечисленными функциональными блоками. Кроме человека-оператора он обеспечивает связь с другим совместно работающим оборудованием, включая и другие роботы.
По мере совершенствования систем управления роботами непрерывно расширяется и перечень операций, осваиваемых роботами. Однако даже в промышленности, по-прежнему, сохраняется значительное число технологических операций, которые не поддаются полной автоматизации. Тем более это относится к таким непромышленным областям применения роботов как экстремальная робототехника. Более того, прогрессирующее усложнение технических систем и выполняемых ими функций непрерывно усугубляет эту ситуацию, так что человек останется необходимым компонентом робототехнических систем в качестве прежде всего верхнего уровня управления. Его задача осуществлять управление операциями, которые не удается автоматизировать, и осуществлять при этом обучение роботов таким операциям с постепенным переводом их в автоматический режим.
Однако поскольку человек остается в контуре управления сохраняется и пресловутая проблема «человеческого фактора». Конечно, в ослаблении этой проблемы важнейшее значение должно иметь создание и развитие «искусственного разума». Таким образом, эта проблема является коренной в дальнейшем развитии современной робототехники, в том числе помимо перечисленных аспектов и для освоения операций, пока принципиально недоступных роботам.
В целом проблема создания «искусственного разума» выходит за рамки робототехники как глобальная проблема, можно сказать, развития человеческой цивилизации. То, что она наиболее остро встала именно перед робототехникой, объясняется самой историей и сущностью робототехники, для которой с самого зарождения эталоном был человек. Именно поэтому уже в первые годы развития современной робототехники наряду с породившими ее прикладными задачами роботизации промышленности возникло и начало параллельно развиваться фундаментальное направление робототехники, целью которого стало создание «робота разумного» по образцу «гомо-сапиенс» как средства экспериментального исследования феномена мышления человека. Объясняется это тем, что робот является уникальным типом машин, не вмещающимся в сложившуюся их классификацию и как бы находящимся над ней.
Робот обладает двусторонним информационным и энергетическим взаимодействием с внешней средой. И в этом отношении он подобен живым существам и соответственно может быть способен к самообучению и самосовершенствованию. Следовательно, в робот можно заложить способность к эволюционному развитию от простого к сложному и пределом такого развития не будет даже человек. Такое саморазвитие является реальным заимствованным у живой природы путем создания «искусственного разума». Но помимо того это еще и, как отмечено, средство решения фундаментальной проблемы познания самого человека.
Необходимо однако иметь в виду, что при создании «искусственного разума» речь не идет не о воспроизведении феномена мышления человека и его личности, а о техническом воспроизведении только профессиональных знаний и интуиции человека в рамках выполняемых им своих узкопрофессиональных функций.
Искусственный разум как и естественный существует в двух измерениях – отдельного робота или какой-либо другой технической системы и как коллективный разум группы таких объектов. В последнем случае это проблема создания коллективного распределенного искусственного разума, решающего задачи поведения всего коллектива. В настоящее время по крайней мере в области микроробототехники уже создаются коллективы из сотен и тысяч простых роботов, совместно решающих достаточно сложные общие задачи. Это отдельная проблема, которая пока только обозначена. По-видимому, и при ее решении традиционно для робототехники аналогом, по крайней мере, на начальном этапе станут коллективы в живом мире от пчел и муравьев до крупных млекопитающих. С их изучения и начнется решение этой проблемы.