

Вопрос 4. Примеры адаптивных систем управления роботами
Выделяют два основных направления в области создания систем управления адаптивными роботами.
1. Разработка сравнительно простых систем управления, основанных на применении, как правило, одного сенсорного устройства и ориентированных на выполнение определенной технологической операции.
2. Разработка сложных систем управления, включающих развитую подсистему восприятия обычно с несколькими сенсорными устройствами и подсистему планирования. Подобные системы создаются в виде экспериментальных макетов для проведения исследований в целях отработки необходимого аппаратного, алгоритмического и программного обеспечения для роботов, обладающих широкими функциональными возможностями для действий в недетерминированной среде. Второе направление исследований обычно связано с решением задачи создания роботов с элементами искусственного интеллекта.
Рассмотрим основные типы адаптивных систем управления, относящихся к первому направлению разработок. Применение подобных адаптивных роботов в ближайшие годы, как показывают соответствующие прогнозы, наиболее перспективно при выполнении следующих технологических операций: упаковка, установка и съем деталей с конвейера, распознавание и сортировка изделий, погрузочно-разгрузочные операции, микросварка при монтаже микроэлектронных приборов, электродуговая и газовая сварка, кислородная резка, окраска распылением, абразивная зачистка и шлифовка, разбор деталей из навала, механическая сборка. Во многих случаях целесообразно наряду с выполнением технологической операции производить контроль качества ее выполнения или контроль качества изделия с помощью сенсоров робототехнической системы. Адаптивные системы управления находят также применение для автоматизации управления автономными внутри- и межцеховыми транспортными тележками.
По мере улучшения характеристик, расширения номенклатуры и уменьшения стоимости сенсоров, вычислительных средств и развития методов обработки сенсорной информации будет происходить существенное расширение областей применения адаптивных роботов.
Рассмотрим основные тенденции развития, а также примеры адаптивных систем управления манипуляционными и транспортными роботами. При создании этих систем находят применение сенсоры различных типов: тактильные, кинестетические и визуальные. Здесь ограничимся рассмотрением примеров адаптивных роботов только с подсистемами технического зрения, которые позволяют решать наиболее сложные задачи. В этих подсистемах часто применяются адаптивные алгоритмы для обработки визуальной информации. Кроме того, проблемы при обработке визуальной информации, имеют наиболее существенное значение и для создания роботов с элементами искусственного интеллекта.
Адаптивные системы управления манипуляционными роботами. Ограничимся здесь рассмотрением примеров систем управления манипуляционными роботами с наиболее освоенными видеосенсорными устройствами на базе прикладных телевизионных установок (ПТУ), фотодиодных матриц и твердотельных оптико-электронных приборов с зарядовой связью (ПЗС).
Существует несколько направлений в создании систем технического зрения (СТЗ) для манипуляционных роботов. Для массового производства обычно разрабатываются специализированные СТЗ, примером которых может являться система для прецизионного сварочного робота.
Система управления прецизионного сварочного робота. Основным технологическим процессом сборки микроэлектронных приборов (МП) является внутренний проволочный монтаж с помощью микросварки. Микросварка контактных площадок кристаллов МП размерами от 4040 до 500500 мкм осуществляется проволокой диаметром 20…500 мкм. Сложность схемы внутренней коммутации между кристаллами, насчитывающей до нескольких тысяч соединений в одном приборе, и необходимость осуществления совмещения под микроскопом прецизионных элементов с высокой точностью определяют целесообразность роботизации этого технологического процесса. Одной из главных задач системы управления роботом является осуществление управления прецизионным шаговым электроприводом в соответствии с эталонной программой позиционирования микроинструмента, осуществляющего сварку.
Упрощенная структурная схема адаптивного робота приведена на рис.2. Освещение исходного объекта (набора кристаллов данного МП) производится инфракрасным и видимым светом через оптическую систему. Световой поток, отраженный от объекта, через оптическую систему и ИК фильтр поступает на светочувствительное поле ПЗС. Сигналы блока управления обеспечивают нормальное функционирование ПЗС. На выходе световая информация представляется в виде последовательности электрических сигналов, которые после преобразования поступают в ЭВМ. Целью обработки визуальной информации является определение координат центров тяжести (центров формы) контактных площадок кристалла, принимаемых за реперные метки. По этим меткам вычисляются истинные координаты положения кристаллов МП относительно координатных осей. Определение поправок для каждой из координат производится на основе сравнения координат предъявленного объекта с эталонным. Эти поправки соответствующим образом корректируют программу позиционирования, управляющую перемещением координатного стола.
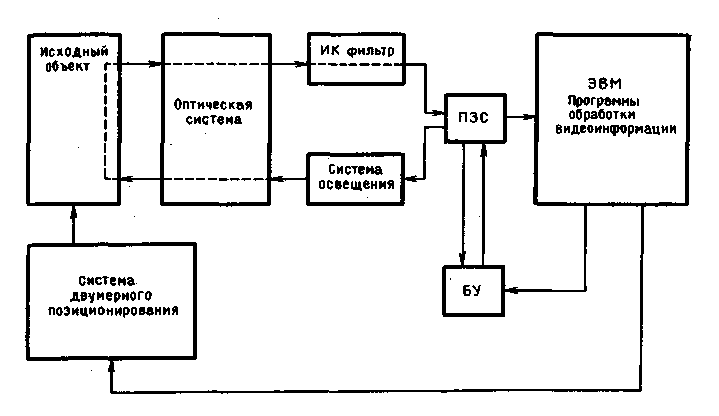
Рис.2. Упрощенная структурная схема адаптивного робота
Для серийного и особенно мелкосерийного производства целесообразным является создание СТЗ с математическим обеспечением, допускающим простую перестройку при изменении наборов объектов, подлежащих распознаванию. Кроме того, такие СТЗ, как правило, должны быть пригодны для работы с манипуляторами различных типов. Примером таких СТЗ является система, предназначенная для работы с бинарными изображениями объектов. Она предназначена для работы с бинарными (двухградационными) изображениями, полученными с помощью телекамер на вакуумных приборах или на ПЗС-матрицах. Особенностью математического обеспечения СТЗ является возможность применения не одного, а нескольких различных алгоритмов распознавания изображений. В системе предусмотрен этап обучения, которое проводится путем предъявления системе объекта с одновременным указанием ей имени класса этого объекта.
Наиболее сложными являются универсальные СТЗ, способные решать различные задачи восприятия в составе систем управления интеллектуальных роботов. Кроме того, СТЗ с широкими функциональными возможностями удобно применять для разработки математического обеспечения вновь проектируемых специализированных и других, более простых СТЗ.
Рядом фирм Японии и США созданы визуальные сенсоры широкого применения и специализированные вычислительные устройства для обработки визуальной информации.
Адаптивные системы управления подвижными роботами. Подвижные роботы представляют собой управляемые подвижные механические системы, предназначенные для транспортировки грузов и проведения исследований в экстремальных условиях. Этот тип роботов можно рассматривать как один из видов автоматических транспортных средств, предназначенных для функционирования в интерактивном или автоматическом режимах в частично или полностью недетерминированных средах. Выбор типа автоматического транспортного средства (ТС) определяется прежде всего степенью неопределенности и изменчивости внешней среды, в которой осуществляется процесс движения, и стабильностью требуемых маршрутов движения. С этой точки зрения все виды автоматических ТС, перемещающихся по поверхности, можно разделить на технологические и роботы высокой проходимости (рис.3).

Рис.3. Классификация автоматических транспортных средств
Технологические транспортные средства охватывают разнообразные виды автоматического транспорта, который применяется или может найти применение в специально организованных средах: различных производствах, быту и для транспортировки грузов по дорогам. Наиболее простым типом таких автоматических средств являются рельсовые транспортные средства (конвейеры и транспортные тележки), а наиболее сложным — автоматические подвижные роботы для движения по неподготовленным трассам. Специально организованные среды, в которых функционируют технологические ТС, имеют высокую степень детерминированности, а наличие некоторой неопределенности в этих средах обусловлено обычно только возможностью случайного появления ограниченного числа типов препятствий на рабочей трассе робота.
Такие транспортные средства вместе с автоматическими складами образуют единую автоматическую транспортно-складскую систему (АТСС).
Робототехнические транспортные средства, представляющие собой автоматические транспортные управляемые тележки (транспортные роботы), обеспечивают наибольшую гибкость АТСС. Для управления отдельными транспортными средствами используется как информация, поступающая от всей системы управления АТСС (системная информация), так и локальная информация, поступающая во время функционирования самого транспортного средства.
В наиболее простых системах автономность практически отсутствует и функционирование их в основном определяется только системной информацией. В этом случае функционирование транспортного средства заранее предопределено его механической конструкцией. Примером таких транспортных средств являются конвейеры различных типов и рельсовые тележки (рис.4).

Рис.4. Классификация способов задания программы движения
транспортного робота
При информационном задании функционирования транспортных роботов применяется принцип управления по «ведущей линии», реализуемый с помощью индуктивных, оптических и радиосистем отслеживания трассы движения. Возможно также программное задание маршрута движения транспортного средства, когда необходимая программа движения вводится в бортовую ЦВМ транспортного средства. Этот способ целесообразно применять при частом и заранее непредвиденном изменении требуемых маршрутов движения. Подобно тому, как это имеет место в манипуляционных роботах, здесь также возможно введение программы с помощью обучения, т.е. проведение транспортного робота вручную по требуемому маршруту с записью соответствующих параметров движения от датчиков информационной подсистемы управления транспортного робота. Обычно оказывается необходимой коррекция положения таких транспортных средств с помощью дополнительных датчиков информации, находящихся на транспортном роботе или вне его. Одной из наиболее сложных проблем является сбор сенсорной информации для обеспечения функционирования роботов высокой проходимости.
Вопрос.5. Проблемы в создании промышленных роботов
Адаптивные и интеллектуальные роботы являются новым классом сложных автоматических устройств, для создания которых необходимо решение многих проблем теории автоматического управления, искусственного интеллекта и создание соответствующих технических средств.
Типовой задачей, решаемой интеллектуальным роботом, является осуществление заданных преобразований во внешней среде с помощью соответствующих сенсомоторных операций, согласованно осуществляемых его подсистемами. Поэтому основной проблемой при создании такого робота является обеспечение необходимых функциональных возможностей отдельных подсистем и робота в целом. Рассмотрим вначале с позиций теории управления интеллектуальный робот как систему, основанную на применении принципа обратной связи. Понятиям, применяемым в робототехнике, можно сопоставить аналогичные понятия в теории автоматического управления; связь между этими понятиями иллюстрируется табл.1.
Таблица 1
Связь между понятиями в теории управления и робототехнике
№ п/п |
Теория автоматического управления |
Робототехника |
1 |
Объект управления |
Проблемная (внешняя) среда |
2 |
Исполнительное устройство |
Эффекторная подсистема |
3 |
Датчики состояния объекта |
Сенсорная подсистема |
4 |
Измерение выходных переменных объекта |
Восприятие внешней среды |
5 |
Исходное состояние объекта |
Начальное состояние среды |
6 |
Требуемое состояние объекта |
Целевое состояние среды |
7 |
Идентификация объекта |
Формирование модели среды |
Из этой таблицы видно, что при определенной трактовке понятий «проблемная среда», «восприятие информации» и др. обычную задачу управления по принципу обратной связи, рассматриваемую в теории автоматического управления, можно трактовать как частный случай по отношению к типовой задаче робототехники. А именно, в этом частном случае «проблемная среда» означает некоторый динамический объект, состояние которого характеризуется набором выходных переменных; «восприятие внешней среды» вырождается в частный случай измерения величины этих переменных. Функциональные возможности обычных автоматических систем с обратной связью ограничиваются только решением задач поддержания заданного значения регулируемой величины и отслеживания входного сигнала. Поэтому основная проблематика теории автоматического управления связана с изучением динамического (временного) аспекта процессов в системах с обратной связью. Регулируемой переменной является некоторая скалярная или векторная величина, которая и описывает состояние управляемого объекта (среды).
В адаптивных роботах также существуют обратная связь от среды, однако здесь большое значение приобретает пространственный аспект описания среды, в связи с чем значительно усложняются сами задачи описания среды и организации процессов управления, направленных на ее преобразование.
Как указывалось ранее, расширение функциональных возможностей роботов с позиций теории управления определяется следующими факторами:
а) объемом информации от сенсорных датчиков;
б) избыточностью степеней свободы исполнительного механизма;
в) многоуровневой организацией хранения и переработки априорной, текущей и обучающей информации.
Характер проблем, возникающих при создании интеллектуальных роботов, можно проиллюстрировать на примере одной из типовых сенсомоторных задач, решаемых манипуляционным роботом.
Пусть, например, требуется произвести сборку сложного изделия, состоящего из нескольких деталей, местоположение и ориентация которых заранее точно не известны. Выполнение этой операции требует решения следующих основных задач в процессе разработки алгоритмического и программного обеспечения робота.
1. Формализация описания каждой детали и цели функционирования робота, т.е. в данном случае результата операции сборки.
2. Формирование алгоритмов и программ, обеспечивающих распознавание каждой детали, ее местоположения и ориентации по информации от сенсорной подсистемы.
3. Формирование алгоритмов и программ, отображающих технологию сборки, т.е. планирование последовательности сборки.
4. Формирование алгоритмов и программ эффекторной подсистемы, осуществляющей перемещения деталей по требуемым траекториям в соответствии с управляющими воздействиями, поступающими от планирующей и сенсорной подсистем.
Необходимыми условиями для успешного функционирования робота в соответствии с разработанными программами является наличие требуемого уровня сенсорного обеспечения и адекватных решаемой задаче характеристик механической (исполнительной) части робота. Под уровнем сенсорного обеспечения понимаются состав и характеристики сенсорных датчиков, обеспечивающих систему управления роботом необходимой информацией для осуществления сборки и соответствующие программы переработки информации. Для решения этих задач могут быть привлечены методы, развиваемые в рамках исследований по искусственному интеллекту.