

Вопрос 3. Классификация роботов
Известно несколько классов роботов: манипуляционные, локомоционные, информационные и другие. В зависимости от степени участия человека в процессе управления (или других признаков) каждый из указанных классов подразделяется на отдельные типы роботов.
Например, манипуляционные роботы могут быть автоматическими, биотехническими и интерактивными.
Автоматические роботы решают возложенные на них задачи без непосредственного участия человека. Автоматические роботы классифицируются по степени разнообразия двигательных и интеллектуальных задач, которые они способны решать. Чем шире и сложнее класс задач, в котором робот проявляет свою универсальность (т.е. способность решать любую из задач данного класса), тем более совершенным, вообще говоря, он является.
Различные типы и разновидности роботов могут отличаться степенью автономности и своими функциональными возможностями. Выбор одной из разновидностей робота определяется:
а) сложностью решаемой задачи;
б) степенью неопределенности внешней среды;
в) требуемой степенью автономности робота;
г) стоимостью системы управления.
Все типы сред, встречающихся в задачах робототехники, можно, несколько условно, разделить на три категории.
К первой категории относятся среды, где уже имеется высокая степень организации или требуемая степень организации может быть достигнута при сравнительно небольших затратах. Такие среды часто встречаются в различных отраслях машиностроительной и приборостроительной промышленности.
Во вторую категорию относят среды, которые можно организовать требуемым образом, однако затраты на такую организацию могут быть весьма значительными. Такое положение часто встречается, например, в сборочном производстве, в некоторых отраслях сельского хозяйства, строительстве, горнодобывающей промышленности и т.д.
В средах третьей категории практически невозможно осуществить их организацию. Среды этой категории встречаются в задачах исследования дна Мирового океана, поверхности планет, при автоматизации ряда процессов в сельском хозяйстве, при лесозаготовках и т.д.
В средах первой категории обычно могут быть применены роботы с наиболее простой системой управления — роботы первого поколения, которые решают двигательные задачи по жесткой программе. Требуемая программа движения составляется человеком-оператором и вводится в программное устройство. В соответствии с этой программой эффекторная (исполнительная) система выполняет предписанные действия. В состав эффекторной системы такого манипуляционного робота входят рабочий механизм (рука, инструмент), датчики информации о положении отдельных звеньев манипулятора и следящие системы (приводы), с помощью которых осуществляется движение каждого звена по заданной программе. Существует много типов промышленных роботов первого поколения, различающихся типом программного устройства, характеристиками приводов и кинематическими схемами рабочего механизма.
Универсальность робота с программным управлением определяется двумя обстоятельствами:
наличием программного устройства, допускающего сравнительно легкую перестройку с одной жесткой программы на другую;
и, как правило, избыточными степенями подвижности в рабочем механизме (манипуляторе), что позволяет реализовать разнообразные движения с помощью соответствующих программ.
Сравнительная простота системы управления робота первого поколения и, как следствие, сравнительно невысокая его стоимость обеспечивают широкое внедрение этих роботов в промышленность.
Автоматизация процессов в средах второй категории возможна на основе применения следующих подходов.
1.Увеличение упорядоченности (организованности) среды до такой степени, при которой возможно применение узкоспециализированных автоматов или роботов первого поколения.
2.Применение роботов второго и третьего поколения (очувствленных), способных функционировать в не полностью организованной среде.
Часто применяется комбинированный подход к проблеме автоматизации, когда среда упорядочивается только частично с целью применения возможно более простых типов роботов.
Основной особенностью роботов второго поколения является наличие обратной связи от среды к роботу, которая обеспечивается с помощью его очувствления.
Совокупность устройств, дающих текущую информацию, часто называют информационной, сенсорной подсистемой или подсистемой восприятия (очувствления). В дальнейшем будем под информационной подсистемой робота понимать совокупность всех устройств, дающих информацию как о состоянии отдельных подсистем самого робота, так и об окружающей его среде.
Сенсорная подсистема (подсистема очувствления) включает в себя только датчики информации об окружающей среде и устройства ее обработки.
Термин подсистема восприятия будем употреблять по отношению к развитой сенсорной подсистеме, способной распознавать объекты, давать описания сцен и т.д.
Часто роботы второго поколения называются адаптивными.
Более сложные роботы, способные получать, сохранять и преобразовывать знания для достижения поставленных перед ними целей относят к роботам третьего поколения. Указанные способности представляют интеллект в его широком понимании.
У роботов, обладающих элементами искусственного интеллекта (роботы третьего поколения), требуемая программа действий должна формироваться на основе заданной цели, априорных знаний о внешнем мире и текущей сенсорной информации. Часто роботы третьего поколения называют интегральными или интеллектуальными. В интеллектуальных роботах, по сравнению с адаптивными, существенно расширяются возможности получения текущей и «командной» (обучающей) информации от сенсорной подсистемы и через систему связи с оператором. Эта информация может храниться в модели среды и, в свою очередь, применяться для организации переработки информации подсистемой планирования и сенсорной подсистемой. Обобщенная схема системы управления интеллектуального робота представлена на рис.2.
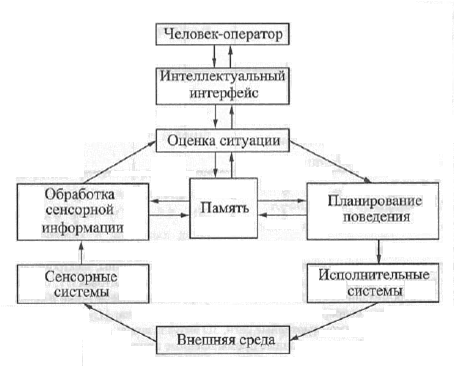
Рис.2. Функциональная схема интеллектуального робота
В разных источниках приводятся различные классификации роботов. Рассмотрим некоторые из них.
По назначению и решаемому классу задач роботы всех поколений могут быть разделены на две большие группы: производственные и исследовательские (рис. 3).Кратко рассмотрим назначение некоторых из них, более подробно данные классы роботов будут рассмотрены на последующих лекциях. Промышленные роботы предназначены для автоматизации всех видов ручных и транспортных операций в различных отраслях промышленности; сельскохозяйственные - для автоматизации трудоемких и монотонных процессов в сельском хозяйстве; транспортные – для автоматизации управления различными транспортными средствами; строительные – для автоматизации ручных операций как вспомогательных, так и основных, органически присущих строительному делу; роботы-проектировщики – для автоматизации проектных работ; бытовые – для автоматизации операций, связанных с бытом человека и с богатой разнообразием сферой его обслуживания.

Рис. 3. Классификация роботов по назначению
В проекте ГОСТ Р ХХХХХ.0002–2016 в соответствии с ИСО 8373:2012 все роботы делятся на две категории – роботы промышленные и роботы сервисные.
Промышленный робот (industrial robot): Автоматически управляемый, перепрограммируемый манипулятор, программируемый по трем или более степеням подвижности, который может быть установлен стационарно или на мобильной платформе для применения в целях промышленной автоматизации.
Сервисный робот (service robot): Робот, выполняющий нужную для человека или оборудования работу, за исключением применений в целях промышленной автоматизации.
Манипулятор (manipulator): Машина, механизм которой обычно состоит из нескольких сегментов, вращающихся или перемещающихся поступательно друг относительно друга с целью взятия и/или перемещения объектов (деталей или инструмента), как правило, по нескольким степеням свободы.
Манипуляционный робот (manipulating robot): Автоматически управляемый, перепрограммируемый манипулятор, программируемый по трем или более степеням подвижности, который может быть установлен стационарно или на мобильной платформе.
Мобильный робот (mobile robot): Робот способный передвигаться под своим собственным управлением.
Транспортный робот (transport robot): Мобильный робот, предназначенный для перемещения на своей платформе физических объектов.