

8.2 Curved Motion |
217 |
8.2 Curved Motion
We can use the insight from motion along a straight wire to understand curved motion, such as the circular motion of an atom in a rotating, rigid molecule or the motion of a roller-coaster car following its track.
Position
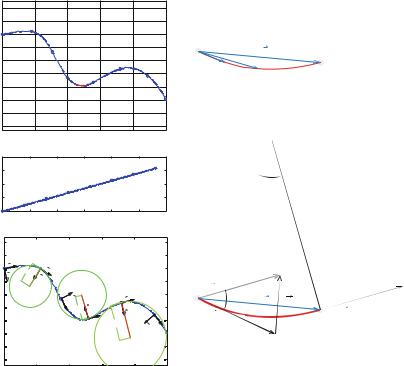
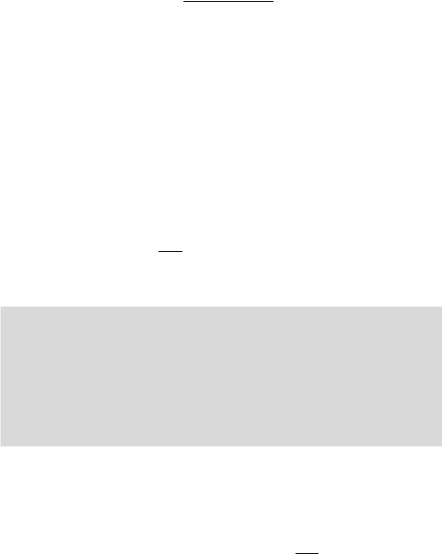
For a train running along a track as illustrated in Fig. 8.2 we can use the same description as we used above: We describe the position, r(s(t )), of the train by the distance, s(t ), travelled along the track. In Fig. 8.2 the train moves with constant speed along the track. A sequence of times at constant intervals, ti = i T , as shown with circles.
(A) |
40 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
20 |
|
|
|
|
|
|
|
|
(D) |
|
|
|
|
|
|
|
|
0 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
−20 |
|
|
|
|
|
|
|
|
|
|
|
|
r |
|
|
|
M] |
|
|
|
|
|
|
|
|
|
A |
|
|
|
|
|
|
|
−40 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
[ |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
y |
−60 |
|
|
|
|
|
|
|
|
|
|
|
|
s |
|
A’ |
|
|
−80 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
A |
|
A’ |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
−100 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
−120 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
−140 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
0 |
|
50 |
100 |
|
150 |
|
200 |
|
|
|
|
|
|
|
|
|
|
|
|
|
x [M] |
|
|
|
(e) |
|
|
|
B |
|
|
|
||
(b) 400 |
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
Δφ |
|
|
|
|||
[M] |
300 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
200 |
|
|
|
|
A’ |
|
|
|
|
|
|
|
|
|
|
|
|
s |
|
|
A |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
100 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
00 |
|
5 |
10 |
|
15 |
20 |
25 |
|
30 |
|
|
|
|
|
|
|
|
|
|
|
|
t [S] |
|
|
|
|
|
|
|
|
|
|
|
|
(c) |
40 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
20 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
0 |
UT |
|
UT |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
U |
ρ |
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
U |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
−20 |
N |
|
|
|
|
|
|
|
|
|
t) |
|
|
|
|
|
|
|
N |
|
|
|
|
|
|
|
|
|
|
|
|
|
||
[M] |
|
|
|
|
|
|
|
|
|
|
|
(t+ |
|
|
|
|
|
−40 |
|
|
|
|
|
|
|
|
|
UT |
|
|
|
|
|
||
|
|
N |
|
|
|
|
|
|
|
Δφ |
r |
U |
|
|
|||
y |
|
|
|
U |
|
|
|
UT |
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
t) |
|
|
−60 |
|
|
U |
ρ |
UN |
|
|
|
A |
|
|
|
s |
T |
(t+ |
|
|
|
|
T |
|
U |
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
N |
|
|
U |
(t) |
|
|
UT |
|
|
|
−80 |
|
|
|
|
|
ρ |
U |
U |
|
|
|
|
A’ |
|
||
|
|
|
|
|
UT |
|
T |
|
|
|
|
||||||
|
|
|
|
|
|
|
|
N |
T |
|
|
|
|
|
|
|
|
|
−100 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
−120 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
−140 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
0 |
|
50 |
100 |
|
150 |
200 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
x [M] |
|
|
|
|
|
|
|
|
|
|
|
||
Fig. 8.2 Illustration of a motion along a curved path. a A train track. The train starts at r = 0 m at t = 0 s. Circles mark the positions at times ti . b Plots of the length s(t ) along the track. Circles indicate the times ti . c The velocity in A approaches a tangent to the line as the time interval t decreases. d Illustration of the change in tangential vector uˆ T . e Illustration of the velocity, acceleration, and normal vectors along the track, as well as the local curvature of the track illustrated
by the radius of the circles
218 |
8 Constrained Motion |
Velocity Vector
What is the velocity of the train? The velocity vector is the time derivative of the position vector:
v |
d r |
= |
lim |
|
r(t + |
t ) − r(t ) |
= |
lim |
|
r |
. |
(8.4) |
|||
|
|
|
|
||||||||||||
= d t |
0 |
|
t |
0 |
|
||||||||||
|
t |
→ |
|
t |
→ |
t |
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
We see from Fig. 8.2c that as the time interval t decreases, the displacement r becomes tangential to the curve, just as we found in Chap. 6:
v(t ) = v(t )uˆ T , |
(8.5) |
where uˆ T (t ) is the unit tangent vector, uˆ T = v/|v|. We also see that as |
t becomes |
small, the arc length along the curve, s becomes approximately the same as the displacement r = | r|:
|
|
r → s when |
t → 0 . |
(8.6) |
||||||
The magnitude of the velocity therefore approaches |
|
|||||||||
|
= |
t |
= |
t |
→ |
t |
→ d t |
|
||
v |
|
| r| |
|
r |
|
s |
|
d s |
. |
(8.7) |
|
|
|
|
|
|
|
||||
when t → 0. Now, we know both the direction and the magnitude of the velocity:
Velocity of motion along a curve: |
|
|
|
v(t ) = v(t ) uˆ T (t ) = |
d s |
uˆ T (t ) . |
(8.8) |
|
|||
d t |
Notice that the unit vector uˆ T is not a constant, but changes with time as the object moves: uˆ T = uˆ T (t ).
Acceleration Vector
The acceleration of the train can be found by taking the time derivative of the velocity vector:
a |
|
d |
v(t )u |
(t ) |
|
d v |
u |
|
v(t ) |
d uˆ T |
. |
(8.9) |
= d t |
|
+ |
|
|||||||||
|
ˆ T |
|
= d t ˆ T |
|
d t |
|
||||||
We recognize the first component as the rate of change of the magnitude of the velocity—this is how the speedometer changes as the train accelerates.

8.2 Curved Motion |
219 |
What about the second term? We have illustrated a small part of a motion in Fig. 8.2d. We are interested in the change in the tangent vector from the point A at r(t ) to the point A′ at r(t + t ). We have illustrated the tangent vectors, and in the small inset, we have illustrated the change in the tangent vectors, uˆ T . For a small increment t , we argue that the length of the uˆ T vector is approximately given as the length of the arc between the two tangent vectors, which is the angle Δφ between the two vectors multiplied by the length of the vectors, which is 1. Now, we can relate the angle Δφ to the local geometry of the curve by drawing a line A B normal to the tangent vector in A, and a line A′ B normal to the tangent vector in A′. This forms a triangle that is congruent with the small triangle formed by the tangent unit vectors, the angle spanned by the two lines A B and A B′ is therefore Δφ. The length of A B and A B′ is called the radius of curvature, ρ. The angle Δφ is also given as the arc
length from A to A′, which is the distance |
|
s along the trajectory, divided by the |
||
local radius ρ: |
|
|
|
|
Δφ = |
|
s |
. |
(8.10) |
|
|
|||
|
ρ |
|||
The direction of the change in the unit tangent vector is toward the center of the circle, that is, toward the point B. We call this direction the normal direction, and we call the unit vector pointing in this direction for the unit normal vector, uˆ N . The change in the tangent vector is therefore:
|
|
s |
|
|
uˆ T = | |
uˆ T |uˆ N = Δφuˆ N = |
|
uˆ N . |
(8.11) |
ρ |
||||
The time derivative of the tangent vector is therefore:
d uˆ T (t ) |
= |
lim |
|
u T |
= |
lim |
|
s |
u |
v(t ) |
1 |
u |
(t ) . |
(8.12) |
|||
d t |
0 |
t |
0 |
ρΔt |
ρ (t ) |
||||||||||||
t |
→ |
t |
→ |
ˆ N = |
|
ˆ N |
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
Now, we insert this expression back into the expression for the acceleration in (8.9), getting
a(t ) = |
d v |
uˆ T (t ) + |
v2(t ) |
uˆ N (t ) . |
(8.13) |
d t |
ρ (t ) |
||||
|
|
|
|
|
|
Here, we write that the radius of curvature, ρ (t ), is a function of time, because the radius of curvature is a function of the position along the curve, ρ (s), and the position along the curve for the object is a function of time, s = s(t ): ρ (t ) = ρ (s(t )).
We have therefore shown that the acceleration vector can be written as
a(t ) = aT (t ) uˆ T (t ) + aN (t ) uˆ N (t ) , |
(8.14) |