

Первый семестр / EKZ_TD / Lektsii_TD
.pdfЗначения rк0 ограничиваются возможностью максимального сжатия и растяжения беговой дорожкишины.
При интенсивном скольжении (неупругом) характер изменения rк нелинейный и зависит в основном от взаимодействия беговой дорожки с опорной поверхностью (сплошные и пунктирные кривые на рисунке) элементарных скоростей и касательныхсил в зонеконтакта.
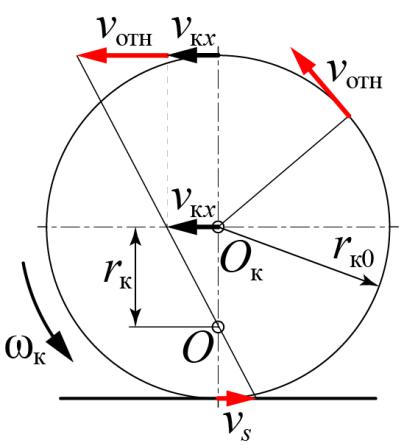
Каждая точка на окружности с радиусом движется относительно центра т. Oк относительной скоростью и переносной относительно опорной поверхности, определяемой действительнымрадиусомкачения:
vкx = rк ωк
Абсолютная скорость точек равна сумме векторовпереноснойи относительнойскоростей.
vкx +vотн
Точку O, в которой абсолютная скорость равна нулю, принято называть мгновенным центром вращенияколеса.
Скоростьскольженияопределяетсявыражением
vs = vотн −vкx
Скольжение колеса принято оценивать
коэффициентом продольного скольжения:
Sбj = |
vs |
=1 |
− |
vкx |
=1− |
rк |
vотн |
|
rк0 |
||||
|
|
|
vотн |
|||
Возможны три случая качения колеса.

Чистое качение колеса
Мгновенный центр вращения т. O совпадает сцентромконтактат. Oш.
vs = 0
Sбj = 0
Буксование колеса
Мгновенный центр вращения т. O находится вышецентраконтактат. Oш.
vs > 0
0 < Sбj ≤1

Юз колеса
Мгновенный центр вращения т. O находится ниже центраконтактат. Oш.
vs < 0
−∞ ≤ Sбj < 0

Уравнения движения колеса
Колесо, кроме рассмотренных геометрических, кинематических и силовых параметров характеризуется
массой mк и моментом инерции
относительно оси вращенияJк.

Уравнения движения колеса aкx = dvкx  dt Продольное ускорение
dt Продольное ускорение
aкz |
= dvкz dt |
Вертикальное ускорение |
|||
εк = |
dωк |
|
Угловое ускорение |
||
dt |
|||||
|
|
|
|||
Pax |
= mк aкx |
Инерционная сила |
|||
M J |
= Jк εк |
Инерционный момент |
|||
Уравнения движения колеса
Pax = Rx − Px
Paz = Rz − Pz Если aкz = 0 то Rz = Pz
* M J = Mк − Rx rд − Rz (aш +cш )
Ранее введено понятие момента сопротивления качениюв свободномрежиме:
M f ш = Rz aш
Уравнение мощностного баланса
Mк ωк = Rx vкx +MJ ωк +M fш ωк +Rx vs
Так как vs = vотн −vкx то послепреобразованийполучим
Mк = Rx rк0 +M J +M fш
Если рассмотреть это уравнение и уравнение равенствамоментов (*), то можно выразить cш
cш = Rx (rк0 −rд ) Rz
Rz