

лекции ДМ
.pdfdv = d2 β cos
и число зубьев zv = dv/mn = d/(mncos2β) = mtz/( mtcos3β), или
zv = z3 β. cos
Увеличение эквивалентных параметров (dv и zv) с увеличением угла β является одной из причин повышения прочности косозубых передач.
Вследствие наклона зубьев получается колесо как бы больших размеров или при той же нагрузке уменьшаются габариты передачи.
Многопарность и плавность зацепления
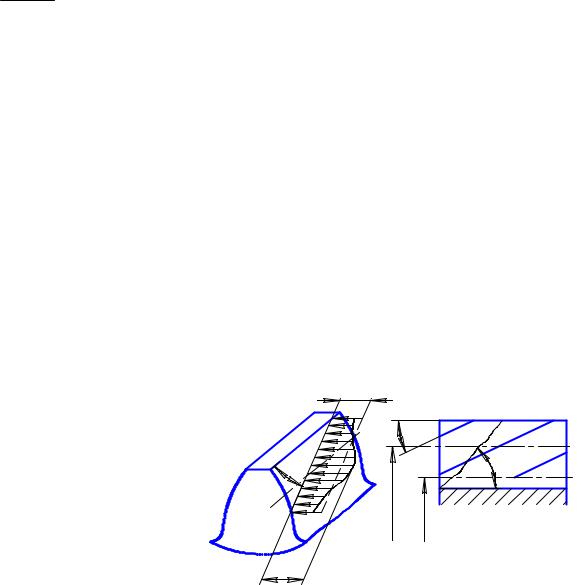
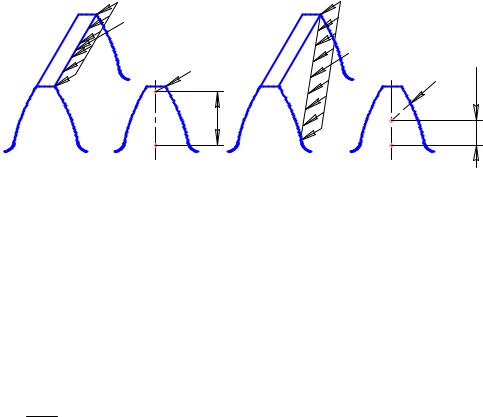
В отличие от прямых косые зубья входят в зацепление не сразу по всей длине, а постепенно. Зацепление здесь распространяется в направлении от точек 1 к точкам 2 (см. рис. 8.1). Расположение контактных линий в поле косозубого зацепления изображено на рис. 8.3, а, б.
а)
α |
|
ε |
|
bt |
bt |
=p |
p |
α |
|
g |
|
β |
|
p |
n |
b |
|
|
|
|
б) |
|
|
|
|
3' |
|
|
β |
|
3' |
|
|
|
|
|
||
|
|
|
|
|
3 |
|
|
3 |
tgβ |
bt |
α |
|
|
|
2' |
|
2' |
|||
|
w |
|
||||
|
2 |
b |
p |
g |
|
|
|
|
|
|
|
2 |
|
|
1' |
|
|
|
|
|
|
|
|
|
|
1' |
|
bw |
1 |
|
|
bw |
1 |
Рис. 8.3
При вращении колес линии контакта перемещаются в поле зацепления в направлении, показанном стрелкой. В рассматриваемый момент времени в зацеплении находится три пары зубьев 1, 2 и 3. При этом пара 2 зацепляется по всей длине зубьев, а пары 1 и 3 – лишь частично. В следующий момент времени пара 3 выходит из зацепления и находится в положении 3'. Однако в зацеплении еще остались две пары 2' и 1'. В отличие от пря-
мозубого косозубое зацепление не имеет зоны однопарного зацепления. В
прямозубом зацеплении нагрузка с двух зубьев на один или с одного на два передается мгновенно. Это явление сопровождается ударами и шу-
мом. В косозубых передачах зубья нагружаются постепенно по мере захода их в поле зацепления, а в зацеплении всегда находится минимум две пары. Плавность косозубого зацепления значительно понижает шум и дополнительные динамические нагрузки.
41
Отмеченное преимущество косозубого зацепления становится особенно значительным в быстроходных передачах, так как динамические нагрузки возрастают пропорционально квадрату скорости.
Косозубые колеса могут работать без нарушения зацепления даже при коэффициенте торцового перекрытия εα < 1, если обеспечено осевое перекрытие bw = pbt /tg β (рис. 8.3, б). Отношение
ε= bwtgβ ≈ bw sinβ
βpbt πmn
называют коэффициентом осевого перекрытия. Рекомендуют принимать
εβ ≥ 1,1.
В косозубом зацеплении нагрузка распределяется на всю суммарную длину контактных линий 1, 2, 3. Удельная нагрузка уменьшается с увеличением суммарной длины контактных линий ℓΣ
lΣ = bw εα (8.1) cosβ
и ℓΣ не изменяется при движении, так как уменьшению линий 3 всегда соответствует равное приращение линии 1.
В соответствии с формулой (8.1) ℓΣ растет с увеличением β, что выгодно. Однако во избежание больших осевых сил в зацеплении рекомендуют принимать β = 8...20°.
На боковой поверхности косого зуба линия контакта располагается под некоторым углом λ (рис. 8.4, а). Угол λ увеличивается с увеличением β. По линии контакта нагрузка распределяется неравномерно. Ее максимум на средней линии зуба, так как при зацеплении серединами зубья обладают максимальной суммарной жесткостью.
При движении зуба в плоскости зацепления линия контакта перемещается в направлении от 1 к 3 (рис. 8.4, б). При этом опасным для прочности может оказаться положение 1, в котором у зуба отламывается угол. Трещина усталости образуется у корня зуба в месте концентрации напря-
жений и затем распространяет- |
а) |
q |
б) |
1 |
|
2 |
|
|
|||||
ся под некоторым углом μ. Ве- |
|
|
|
|
||
роятность косого излома отра- |
|
|
λ |
|
|
|
|
|
|
|
|
3 |
|
жается на прочности зубьев по |
|
λ |
|
|
μ |
|
напряжениям изгиба, а концен- |
|
|
|
|
|
|
трация нагрузки q – на прочно- |
|
|
b |
|
|
|
|
|
d d |
|
|
|
|
сти по контактным напряжени- |
|
|
|
|
|
|
ям. |
|
qmax |
|
|
|
|
С наклонным расположе- |
|
|
|
|
|
|
нием контактной линии связана |
Рис. 8.4 |
|
42
целесообразность изготовления косозубой шестерни из материала, значительно более прочного (высокотвердого), чем у колеса. Это объясняет-
ся следующим. Ножки зубьев обладают меньшей стойкостью против выкрашивания, чем головки, так как у них неблагоприятно сочетание направления скольжения и перекатывания зубьев. Следовательно, ножка зуба колеса, работающая с головкой зуба шестерни, начнет выкрашиваться в первую очередь. Нагрузка передается на головку зуба колеса, работающую с ножкой зуба шестерни. Слабая ножка зуба колеса разгружается, и выкрашивание прекращается. Дополнительная нагрузка ножки зуба шестерни не опасна, так как она изготовлена из более стойкого материала. Применение высокотвердой шестерни позволяет дополнительно повысить нагрузочную способность косозубых передач до 25...30 %.
Расчет коэффициента торцового перекрытия εα. Для нефлан-
кированных передач без смещения
|
|
|
1 |
|
1 |
|
|
|
|
|
|
||||
εα = 1,88 |
−3,2 |
|
± z |
|
|||
z |
2 |
cosβ. |
|||||
|
|
|
1 |
|
|
|
|
Для прямозубых передач рекомендуют εα ≥ 1,2, для косозубых εβ ≥ 1. Значение εα зависит от числа зубьев z и угла наклона зубьев β. С увеличением β растет окружной шаг рbt , а рабочая длина линии зацепления ga остается неизменной. При этом εα уменьшается. Уменьшение εα является одной из причин ограничения больших β.
Усилия в зацеплении
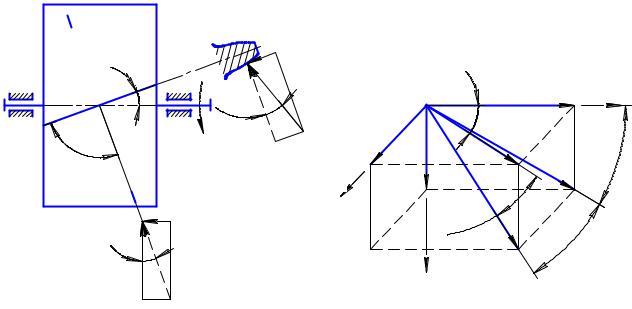
В косозубой передаче полная нормальная сила Fn действует нормально к поверхности зубьев (рис. 8.5, а).
а) |
n |
|
|
|
|
Fr |
б) |
|
|
|
|
|
|
|
β |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
β |
Ft |
|
|
|
|
|
|
|
|
α |
|
|
o |
|
|
x |
||
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
nw |
|
F |
|
|
|
|
|
|
|
9 |
|
Т1 |
F |
' |
Fa |
|
|
|
|
w |
|
|
0° |
|
|
n |
|
|
|
|
||||
|
|
|
|
t |
|
y |
F |
Ft ' |
|
F |
α |
t |
|
|
n F |
|
|
|
|
||||||
|
|
|
|
|
r |
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
β |
a |
|
|
|
|
αnw |
β |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
b |
|
|
|
|
|
Ft |
Ft |
' |
|
|
z |
Fn |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
Рис. 8.5 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
43

Так как в плоскости зацепления зубья наклонены под углом βb , то вектор силы Fn по отношению к торцовой плоскости также наклонен под углом βb (см. рис. 8.5, б). В системе координат xyz разложение силы Fn принимает вид параллелепипеда. Сила Fn является диагональю параллелепипеда. В плоскости n-n полное усилие Fn раскладывают на составляющие – Ft′ и радиальное усилие Fr. Сила Ft′ в плоскости xoy раскладыва-
ют на составляющие – окружное усилие Ft, и осевое усилие Fа. Усилия для косозубого зацепления определяются в виде:
F = |
2 T1 |
|
– окружная сила; |
|
||||||||
|
|
|
||||||||||
t |
|
dw1 |
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|||
Fa = Ft tg β – осевая сила; |
|
|||||||||||
F |
= F tgα |
tw |
= |
Ft tgαnw |
– радиальная сила; |
|||||||
|
||||||||||||
r |
|
|
t |
|
|
|
cosβ |
|
||||
|
|
|
|
|
|
|
|
|
|
|
||
Fn = |
|
F |
|
|
= |
|
|
Ft |
– нормальная сила. |
|||
|
|
|
|
|
|
cosαtw cosβb |
||||||
|
|
|
cosβb |
|
|
|||||||
Наличие в зацеплении осевых сил, которые дополнительно нагружают опоры валов, является недостатком косозубых колес. Этот недостаток устраняется в шевронной передаче, которая подобна сдвоенной косозубой передаче с противоположным направлением зубьев.
Расчет косозубых цилиндрических передач на прочность по контактным напряжениям
Запишем условие прочности с использованием формулы ГерцаБеляева
σн = zм |
q ≤ [σн] . |
(8.2) |
|
2ρпр |
|
Выразим входящие в формулу (8.2) величины через параметры косозубой
цилиндрической передачи. Погонная нагрузка q = Fn kн. Так как в косо- lΣ
зубых зацеплении работает всегда более одной пары зубьев, то нагрузка будет распределяться в поле зацепления (рис. 8.3) на несколько зубьев.
Суммарная длина |
контактных |
линий будет равна lΣ = |
bw |
εα, нор- |
|||
cosβb |
|||||||
|
Ft |
|
2T1 |
|
|
||
мальная сила F = |
, окружная сила F = |
. |
|
|
|||
|
|
|
|
||||
n |
cosαtw cosβb |
t |
dw1 |
|
|
||
|
|
|
|
||||
44
Подставляя в формулу для полной нагрузки, получим
|
2 T1 kн |
|
|
|
|
|
|
q = dw1bwεα cosαtw . |
|
|
|
|
(8.3) |
||
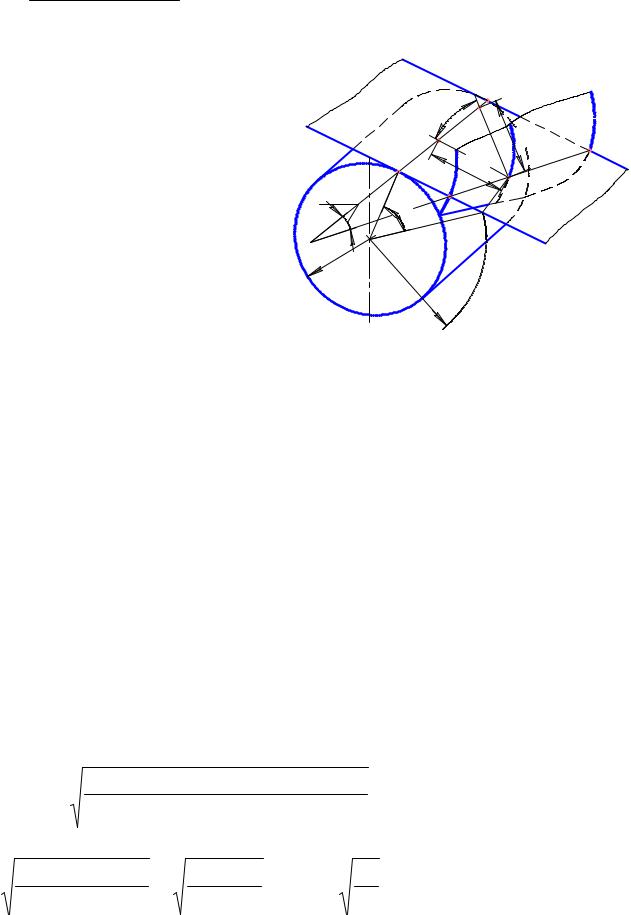
Образование рабочих поверх- |
|
E |
|
|
|
||
ностей косозубых передач можно |
|
|
b" |
|
|||
представить так. Имеем неподвиж- |
|
βb |
|
S |
|||
|
|
|
|||||
ный основной цилиндр db, по по- |
|
|
|
||||
|
b |
|
ρ |
k" |
|||
верхности |
которого |
катится без |
|
ρ |
n |
||
скольжения плоскость Е (рис. 8.6). |
|
b' |
tw |
|
|
||
βb |
α k' |
|
k |
|
|||
Лежащая |
в этой плоскости линия |
|
|
||||
|
t |
|
|
|
|||
k′k″, образующая угол βb с осью |
|
w |
|
|
|
||
|
|
|
|
|
|||
цилиндра, |
описывает |
поверхность |
db |
d |
|
|
|
S. Через точку k, лежащую на ли- |
|
w |
|
|
|
||
|
|
|
|
|
|
|
|
нии k′k″, проводим нормальное и торцовое сечения и определяем соответствующие радиусы кривизны.
Приведенный радиус кривизны ρпр найдем, рассуждая аналогично как и при выводе формул для ρпр прямозубого зацепления и с учетом взаимосвязи размеров косозубого колеса в торцовом и нормальном к направлению зуба сечениях (рис. 8.6). Радиус кривизны в торцовом сече-
нии |
|
|
ρt |
зуба |
|
|
|
|
ρt = 0,5dw sin αtw , |
|
в |
|
|
нормальном |
сечении |
|||||||||||||||||||
ρn = |
|
|
|
|
= |
dw sin αtw |
. С учетом этого, радиусы кривизны для шестер- |
|||||||||||||||||||||||||||
cosβb |
|
|
|
2 |
cosβb |
|||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
dw |
|
|
|
|
|
dw u |
|
|
|
||||||||||||||
|
|
|
|
|
d |
w |
|
sin α |
tw |
|
|
|
|
|
|
|
|
|
|
sin α |
tw |
|
sin α |
tw |
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
2 |
|
|
|
1 |
|
|
|
||||||||
ни ρ |
n |
|
|
= |
|
1 |
|
|
|
|
|
|
|
, |
для колеса ρ = |
|
|
|
|
= |
|
|
, так |
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
n2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1 |
|
|
|
2 |
|
|
cos |
βb |
|
|
|
|
|
|
2 |
|
|
cosβb |
2 |
|
cosβb |
||||||||||||
как ρn |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||
2 |
= ρn u . |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||
|
|
|
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
Подставив найденные значения в формулу для ρпр, найдем |
|
|
|
|||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
ρn ρn |
2 |
|
|
|
|
dw |
1 |
u sin αtw |
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
ρпр = |
|
|
|
|
|
1 |
|
|
= |
|
|
|
|
. |
|
|
|
|
|
|
|
|
|
|
(8.4) |
||||||||
|
|
|
ρn |
2 |
±ρn |
1 |
|
2 |
(u ±1)cosβb |
|
|
|
|
|
|
|
|
|
|
|||||||||||||||
|
Преобразуя уравнения (8.2) с учетом формул (8.3) и (8.4), запишем |
|||||||||||||||||||||||||||||||||
|
σн = zм |
|
|
|
|
|
2 T1 kн2 (U ±1) cosβb |
|
|
|
|
≤ [σн]. |
|
|
|
|
|
|||||||||||||||||
|
|
|
dw1bw cosαtwεα2 dw1 U sin αtw |
|
|
|
|
|
||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||
|
Произведем |
|
|
дальнейшее преобразование, для |
чего |
обозначим |
||||||||||||||||||||||||||||
zнк = |
|
|
cos |
|
|
cosβb |
|
|
|
|
|
= |
|
2cosβb , zεк |
= |
1 |
– коэффициенты, учиты- |
|||||||||||||||||
|
|
|
|
αtw sin αtw |
|
|
sin 2αtw |
|
|
|
εα |
|
|
|
|
|
|
|
||||||||||||||||
45
вающие для косозубого зацепления (индекс k) форму сопряженных про-
филей и влияние коэффициента торцового перекрытия εα , т. е. многопарность зацепления. Тогда зависимость для проверочного расчета косозубого зацепления будет иметь вид
σн = zм zнк zεк |
2 T1 kн |
u ±1 |
≤ [σн]. |
(8.5) |
|
d2w1 bw |
u |
||||
|
|
|
Рассуждая аналогично как при выводе формул (6.6) и (6.7) для прямозубых передач, получим формулу для проектировочного расчета косозубого зацепления
aw ≥ kak (u ±1) 3 |
T1 kн |
1 |
, |
|
|
|
[σн]2 |
ψba u |
|
dw1 ≥ kdk 3 |
T1 kн |
u ±1 |
, |
|
[σн]2 ψbdu |
|
|||
где kak = 3 0,5 (zм zнк zεк)2 , kdk = 3 2 (zм zнк zεк)2 .
Расчет цилиндрических косозубых передач по напряжениям изгиба
При выводе расчетных соотношений изгибной выносливости косозубого колеса используют полученные выше расчетные формулы для прямозубого колеса, при этом в указанные зависимости подставляют параметры эквивалентного прямозубого колеса. Так, в качестве исходного берем уравнение прочности (7.3) для прямозубого колеса
σF = Ft kF YF ≤ [σF].
bw m
Подставляя в него параметры эквивалентного колеса
|
|
|
|
|
|
|
Ft |
|
|
|
bw |
|
|
|
|
|
|
|
|
z |
|
|
|
|
m |
v |
= m |
n |
, |
F |
= |
, b |
v |
= |
ε |
α |
, |
Y |
= Y , |
z |
V |
= |
|
, ... |
.Тогда |
||||
|
|
|
3 |
|
||||||||||||||||||||
|
|
|
tv |
cosβ |
|
|
cosβ |
|
|
FV |
FK |
|
|
cos |
β |
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
σ |
|
= |
Ftv kF |
Y |
= |
|
Ft kF cosβ |
Y |
= |
Ft kF |
Y . |
|
|
bV mV |
bw εα mn cosβ |
bw εα mn |
|||||||||
|
F |
|
FV |
|
FK |
|
FK |
|||||
Введем обозначения Yε = |
1 |
– коэффициент, учитывающий влияние тор- |
||||||||||
|
||||||||||||
|
|
|
|
|
|
|
εα |
|
|
|
|
|
цевого перекрытия, т.е. многопарность зацепления. С учетом этого полу-
чим σ |
F |
= |
Ft k |
Y |
Y . |
|
|||||
|
|
|
FK |
ε |
|
|
|
|
bw mn |
|
|
46
Сравним расположение точки приложения сил относительно опасного сечения зуба прямозубого и косозубого колес (рис. 8.7 а, б).
Fn
Fn
qн
l ïðÿì
a)
Fn |
|
Fn |
êîñ |
l |
|
qн
б)
Рис. 8.7
Из сравнения схем действующих в зацеплении сил можно видеть, что вследствие наклонного расположения зуба плечо силы Fn относитель-
но опасного сечения lкос для косозубого колеса меньше, чем для прямо-
зубого lпрям. Следовательно, напряжения в опасном сечении зуба косозубого колеса меньше, чем у прямозубого. Это учитывается введением ко-
эффициента Yβ, учитывающего угол наклона зуба β.
Yβ =1−140β° при β < 40º и Yβ = 0,7 при β ≥ 40º.
Учитывая, |
что F = |
2 T1 |
, окончательно получим формулу проверочного |
|||||||||
|
|
|
||||||||||
|
|
|
|
t |
dw |
|
|
|
||||
|
|
|
|
|
|
|
1 |
|
|
|
|
|
расчета изгибной выносливости зубьев косозубой передачи |
||||||||||||
σF = |
2 T1 kF |
|
YFK Yε Yβ ≤ [σF]. |
|
(8.6) |
|||||||
dw1 bw mn |
|
|||||||||||
|
|
|
|
|
|
|
|
|
= 2 aw , получим зависи- |
|||
Преобразуя (8.6) |
|
с учетом того, что dw |
|
|||||||||
мость для проектировочного расчета |
1 |
u ±1 |
||||||||||
|
|
|||||||||||
|
|
|
T |
(u ±1)k |
|
|
YFK |
|
|
|
||
m |
n |
≥ |
1 |
aw bw |
|
F |
|
1 |
Y Y . |
|
|
|
|
[σF] |
|
|
|||||||||
|
|
|
|
|
|
β ε |
|
|
||||
47
Лекция 9
Конические зубчатые передачи
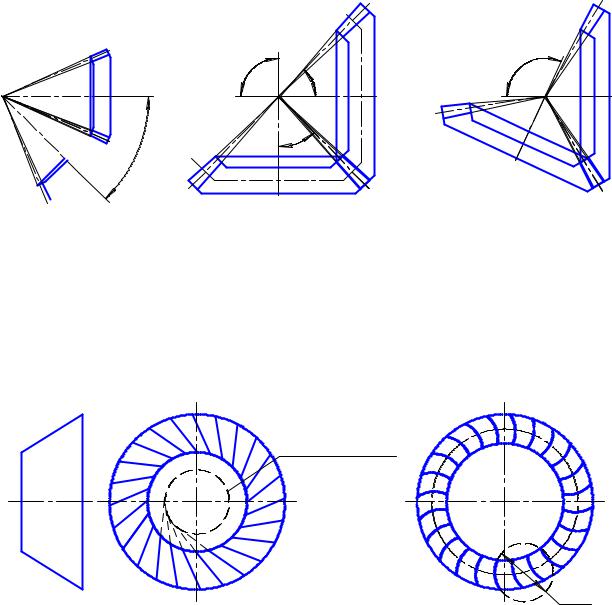
Конические зубчатые колеса применяются в передачах, у которых оси валов пересекаются под некоторым углом Σ (рис. 9.1). Обычно угол пересечения осей находится в пределах 10º < Σ < 180º.
Σ
 Σ
Σ
Наиболее распространены
δ
1
δ |
2 |
Рис. 9.1
передачи
Σ
с углом пересечения осей
Σ= 90º, так называемые ортогональные передачи.
Внастоящее время применяются следующие конические колеса: а) с прямым зубом;
б) с тангенциальным зубом, направленным по касательной к некоторой воображаемой окружности (рис. 9.2);
в) с круговым зубом, расположенным по дуге окружности d0 (рис. 9.3).
Воображаемая окружность
|
d0 |
Рис. 9.2 |
Рис. 9.3 |
Конические передачи сложнее цилиндрических в изготовлении и монтаже. Для нарезания конических колес требуются специальные станки и специальный инструмент. Кроме допусков на размеры зубьев здесь необходимо выдерживать допуски на углы ∑ , δ1 и δ2 , а при монтаже обеспечивать совпадение вершин конусов. Выполнить коническое зацепление с той же степенью точности, что и цилиндрическое, значительно труднее. Пересечение осей валов затрудняет размещение опор. Одно из конических колес, как правило, располагают консольно. При этом увеличивается неравномерность распределения нагрузки по длине зуба (см.
48
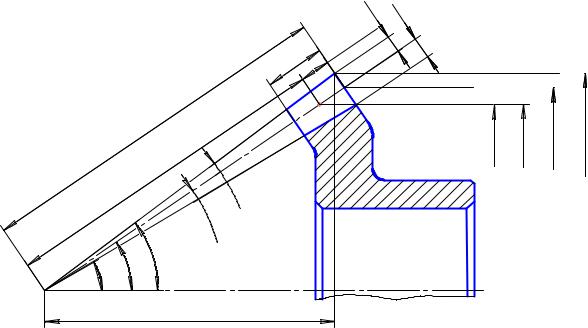
рис. 6.1). В коническом зацеплении действуют осевые силы, наличие которых усложняет конструкцию опор. Все это приводит к тому, что, по опытным данным, нагрузочная способность конической прямозубой передачи составляет лишь около 0,85 цилиндрической. Несмотря на отме-
ченные недостатки, конические передачи имеют широкое применение, поскольку по условиям компоновки механизмов иногда необходимо располагать валы под углом.
Геометрические параметры конических зубчатых передач
Аналогами начальных и делительных цилиндров цилиндрических передач в конических передачах являются начальные и делительные конусы с углами δ1 и δ2. (см. рис. 9.1) При коэффициентах смещения инструмента х1 + х2 = 0 начальные и делительные конусы совпадают. Этот наиболее распространенный вариант рассматривается ниже. Конусы, образующие которых перпендикулярны образующим делительных конусов,
называют дополнительными конусами (рис. 9.4).
|
bw |
5 |
|
, |
|
0 |
|
bw
h |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
h |
|
|
|
|
|
|
|
|
|
||||||
a |
|
|
|
|
|
|
|
|
|
||||||||
|
|
e |
|
|
|
|
|
|
|
|
|
||||||
|
e |
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
f |
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Re
Rm
 θ a
θ a
 θ f
θ f
δ a
δ
δ
f |
B
fe |
m |
e |
ae |
d |
d |
d |
d |
Рис. 9.4
Сечение зубьев дополнительным конусом называют торцовым сече-
нием. Различают внешнее, внутреннее и среднее торцовые сечения. Раз-
меры, относящиеся к внешнему торцовому сечению, сопровождают индексом е, например de , Re и др. Размеры в среднем сечении сопровождают индексом m: dm , Rm и др.; Re и Rm – внешнее и среднее конусные расстояния. Размеры по внешнему торцу удобнее для измерения, их указывают на чертежах. Размеры в среднем сечении используют при силовых расчетах. Для прямозубых передач торцовое t и нормальное n сечения совпадают. При этом mte = mne округляют до стандартного (см. табл. 3.1).
49

Зависимости размеров в среднем и торцовом сечениях:
|
Re = Rm |
+ 0,5bw = |
de |
|
|
; |
||
|
2sin δ |
|||||||
|
|
|
|
|
||||
|
de = mte z = 2 Re sin δ; |
|
|
|
||||
|
dm = mtm z = 2 (Re −0,5 bw ) sin δ = de (1−0,5ψbR ), |
|||||||
где |
ψbR = |
bw |
≤ 0,3 – коэффициент ширины относительного конусного |
|||||
Re |
||||||||
|
|
|
|
|
|
|
||
расстояния; |
|
|
|
|
|
|||
mtm = mte Re −0,5 bw = mte |
Rm ; отсюда |
|||||||
|
|
|
Re |
Re |
|
|||
dm |
= mtm z = mte z Re −0,5 bw = de Rm ; |
|||||||
|
|
|
Re |
|
|
Re |
||
hae = mte – внешняя высота головки зубьев; hfe = 1,2 mte – внешняя высота ножки зуба; h = 2,2 mte – внешняя высота зуба;
θf = arctg hfe – угол ножки зуба; Re
δa = δ+ θf
– углы конусов вершин зубьев и впадин соответственно;
δf = δ −θf
dae = de + 2hae cosδ = mte(z + 2cosδ); dfe = de − 2hfe cosδ = mte(z − 2,4cosδ).
Передаточное число
Как и у цилиндрических передач
u = n1 = de2 = z2 . n2 de1 z1
Так как de1 = 2 Re sinδ1 и de2 = 2 Re sinδ2 , то u = sin δ2 .
sin δ1
В общем случае, когда Σ ≠ 90°; Σ = δ1 + δ2 |
δ2 = Σ −δ1 |
|||||||||||
u = sin δ2 = sin(Σ −δ1) |
= sin Σcosδ1 −cosΣsin δ1 = sin Σ |
−cosΣ. |
||||||||||
|
sin δ |
|
sin δ |
|
|
|
sin δ |
tgδ |
|
|||
|
|
1 |
|
1 |
|
|
|
|
1 |
1 |
|
|
Отсюда получаем: |
|
|
|
|
|
|
|
|
|
|||
tgδ |
= |
|
sin Σ |
|
; tgδ |
2 |
= |
|
u sin Σ |
; |
|
|
u |
+ cosΣ |
1+ u cosΣ |
|
|
||||||||
1 |
|
|
|
|
|
|
||||||
50