

Особенности преобразования движения в зубчатой передаче
У фрикционных передач контакт колес F и C осуществляется только в точках А и А’ – см.рис.11.4. При этом используются только окружные скорости Vу, так как в точках А и А’ радиальные скорости Vz равны нулю (см. выше). В зубчатых передачах колеса F и C взаимодействуют через зубья. Контакт зубьев распространяется на участки, где обе скорости Vу и Vz не равны нулю. Со скоростью Vz связана специфика преобразования движения в зубчатой передаче.
|
На рис.11.8 изображены зубья гибкого F и жесткого С колес. Там же показаны векторы скоростей зубьев в точке контакта на окружности r: окружная Vу и радиальная Vz гибкого колеса, окружная VС жесткого колеса. Скорости Vу и Vz определяются по формулам (11.13), (11.6), (11.7). Скорость VС зависит от передаточного отношения, которое однозначно определяется числом зубьев колес формула (11.17)
Скорость Vу сообщается зубу колеса С как скорость переносного движения без скольжения, а |
Рис. 11.8 |
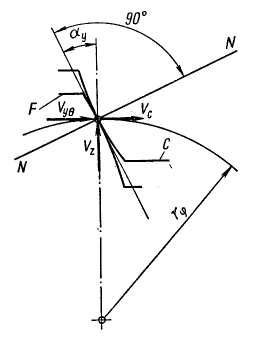
скорость Vz как скорость относительного движения преобразуется в окружную скорость Vyz по принципу наклонной плоскости со скольжением (клиновой эффект)
Vyz = Vztg y, (11.21)
где y – угол профиля зуба колеса С в точку контакта.
Очевидно, что
Vу + Vyz = VС . (11.22)
П р и м е ч а н и е. Формула (11.22) не противоречит основному закону зацепления, требующему равенства проекций скоростей зубьев на общую нормаль NN в точке контакта. В нашем случае
Vуcos y + Vzsin y = VCcos y,
разделив на cos y, получим формулу (10.22).
Исследования показывают, что зацепление зубьев волновой передачи может существовать даже при условии нарушения равенства (11.22). объясняется это тем, что дополнительное деформирование системы под нагрузкой сопровождается дополнительными перемещениями и дополнительной окружной скоростью. Назовем эту скорость окружной скоростью деформирования и обозначим Vд. При этом получим
Vу + Vyz + Vд = VС (11.23)
Скорость Vд является как бы компенсатором в условии равенства скоростей. Она может быть как положительной, так и отрицательной. Vд имеет место только тогда, когда передача находится под нагрузкой. Компенсация неравенства скоростей за счет деформирования под нагрузкой связана с дополнительными напряжениями в гибком колесе. Ее можно использовать только в сравнительно небольших пределах, допускаемых условиями прочности гибкого колеса.
В целях уменьшения износа зубьев и потерь на трение в зацеплении выгодно уменьшать использование клинового эффекта для передачи движения. С этой целью параметры зацепления следует выбирать так, чтобы зацепление осуществлялось в зоне малых углов (в зоне большой оси генератора).
Форма и величина деформирования гибкого колеса
Волновая передача может быть работоспособной при различных формах и величинах деформирования гибкого колеса. Здесь нет однозначного решения. Исследователями предложены формы: по cos 2, по эллипсу, с эвольвентными участками, с участками, очерченными по дугам окружности, по форме кольца, деформированного системой сосредоточенных сил, и пр. Критерием для оценки различных вариантов служат нагрузочная способность, к.п.д., долговечность.

Рис.11.9
Форма по рис.11.9,а осуществляется генератором с двумя роликами; по рис.11.9,б – четырехроликовым генератором; по рис.11.9,в – дисковым генератором (два больших ролика). Любая из форм может быть получена также при кулачковом генераторе – рис.11.10. Кулачок генератора Н выполняют по форме

Рис.11.10
деформирования гибкого колеса. Для уменьшения трения между кулачком и гибким колесом располагают тела качения (гибкий подшипник). Кулачковый генератор лучше других сохраняет заданную форму деформирования под нагрузкой и поэтому считается предпочтительней.
К. п. д. передачи
Исследованиями установлено, что основными составляющими потерь волновой передачи являются потери в зубчатом зацеплении и генераторе. Несмотря на значительную нагрузку зацепления, обусловленную большими передаточными отношениями, реализуемыми в одной ступени волновой передачи, потери здесь сравнительно не велики, так как не велики скорости скольжения.
Значительная доля потерь приходится на генератор как элемент конструкции, вращающийся с высокой скоростью входного звена и воспринимающий большие нагрузки выходного звена.
Так же как и в простых передачах, к.п.д. растет с увеличением нагрузки и уменьшается с увеличением передаточного отношения.
Для приближенной оценки максимального значения к.п.д. силовых передач с кулачковым генератором предложена формула:
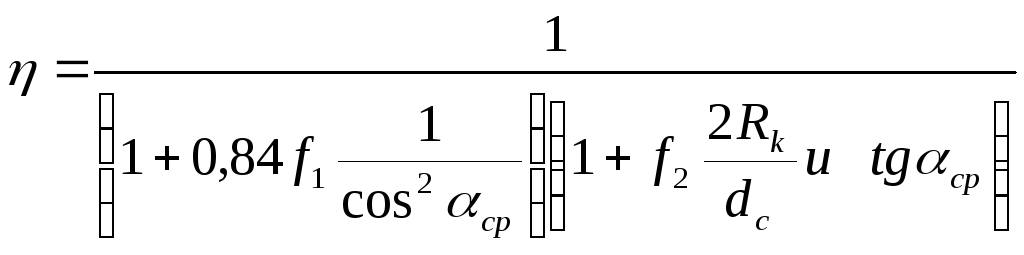 , (11.24)
, (11.24)
где Rк – радиус дорожки качения внутреннего кольца гибкого подшипника генератора; f1 0,025 0,04 – условный коэффициент трения в зацеплении; f2 0,0045 0,006 – условный коэффициент трения в гибком подшипнике.
Практически величина к.п.д. при i 80 250 располагается в пределах 0,8 0,9.