

Контрольные вопросы
1. Перечислите основные средства защиты электроприемников.
2. Как устроена и для чего применяется плавкая вставка ?
3. Как устроено и для чего применяется тепловое реле ?
4. Какие функции защиты выполняет автоматический выключатель ?
5. Что называется защитной характеристикой ?
6. Как выбирается плавкая вставка для защиты одного электродвигателя и для защиты группы потребителей ?
7. Как выбирается тепловое реле ?
8. Как выбирается автоматический выключатель ?
9. Как осуществить настройку защиты одного электродвигателя от перегрузки ?
10. Как включается в электрическую схему для защиты электродвигателя от перегрузки тепловое реле магнитного пускателя ?
Лабораторная работа № 2 исследование характеристик двигателей постоянного тока
ЦЕЛЬ РАБОТЫ. Изучить устройство, принцип работы ДПТ с параллельной, последовательной и смешанной обмотками возбуждения, способы пуска и принципы регулирования частоты вращения ДПТ, ознакомиться с тормозными режимами работы ДПТ.
ПРОГРАММА РАБОТЫ.
1. Изучить устройство и принцип работы ДПТ с различными схемами включения ОВ.
2. Ознакомиться с экспериментальными механическими характеристиками ДПТ с параллельной ОВ и со смешанной ОВ в различных рабочих режимах.
3. Рассчитать и построить механические характеристики ДПТ с параллельной ОВ при работе в двигательном режиме, режиме динамического торможения и торможения противовключением.
Основные теоретические положения.
В сельскохозяйственном производстве электродвигатели постоянного тока (ДПТ) широко применяются на мобильных машинах, в испытательных стендах и установках, а также на стационарных объектах. Конструктивно ДПТ, независимо от схемы включения их обмоток, состоят из неподвижного статора (с размещенными на нем обмотками возбуждения) и вращающегося якоря (с обмоткой якоря). Напряжение питания на обмотки возбуждения и якоря подается от источника постоянного тока. Ток, протекающий по обмотке возбуждения, создает внутри статора неподвижное магнитное поле. Это поле взаимодействует с током якоря и создает вращающий электромагнитный момент на якоре, т. е. происходит преобразование электрической энергии в механическую энергию. Для получения вращающего момента при любом угле поворота якоря, на нем расположено несколько одинаковых обмоток. В любой момент подключенной к сети может быть только одна из обмоток якоря. Это подключение осуществляется с помощью ламелей коллектора (к ним подсоединены обмотки якоря) и щеточного механизма, осуществляющего коммутацию обмоток якоря при вращении.
В зависимости от схемы соединения обмотки возбуждения (ОВ) и обмотки якоря ДПТ (рис.2.1) могут быть с параллельной обмоткой ОВ, с последовательной ОВ и со смешанной ОВ.
Механические характеристики ДПТ в двигательном режиме работы с различными схемами включения ОВ приведены на рис. 2.2. С целью наглядности они построены для двигателей, имеющих одинаковые значения номинального момента - Мн и номинальной частоты вращения ротора – ωн; где
ω1 = ωо = (1,05 … 1,1) ωн – для ДПТ с параллельной ОВ;
ω2 = ωо = (1,7… 2,0) ωн – для ДПТ со смешанной ОВ;
ωо – скорость идеального холостого хода двигателя.
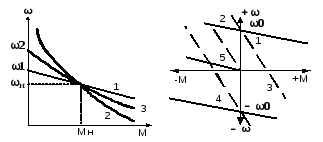
Механические характеристики ДПТ с параллельной ОВ в различных режимах работы приведены на рис.2.3, где 1 – двигательный режим работы; 2 – режим генераторного торможения; 3 – тормозной спуск; 4 – торможение противовключением; 5 – динамическое торможение.

|
Рис. 2.2. Характеристики ДПТ: 1 – с параллельной ОВ; 2 – с последовательной ОВ; 3 – со смешанной ОВ. |
Рис. 2.3 Режимы работы ДПТ с параллельной ОВ: - естественные и _ _ _ - искусственные механические характеристики. |
Уравнения механической - ω = f(M) и электромеханической – ω = f(I) характеристик ДПТ с любой схемой соединения его ОВ выводятся из следующих соотношений
Uc = Eя + Iя (Rя + Rx), (2.1)
Eя = k Ф ω, (2.2)
M = k Ф Iя, (2.3)
где Uc - напряжение сети, поданное на якорь двигателя, В; Eя – электродвижущая сила (ЭДС), наводящаяся во вращающемся якоре ДПТ от магнитного поля, создаваемого ОВ, В; М – вращающий электромагнитный момент двигателя, Нм; Iя – величина тока в цепи якоря, А; Rя – внутреннее активное сопротивление якорной цепи, включая обмотки якоря, компенсационных и дополнительных полюсов и щеточных контактов, Ом; Rx – внешнее активное сопротивление, включенное последовательно с обмоткой якоря, Ом; k – конструктивный коэффициент двигателя, Вс / Вб); Ф – магнитный поток, создаваемый ОВ, Вб; ω – угловая частота вращения якоря, 1/c.
Уравнение механической характеристики ДПТ
ω
= (2.4)
(2.4)
Уравнение электромеханической характеристики ДПТ
ω
=
 ,
(2.5)
,
(2.5)
Характеристики ДПТ, построенные согласно 2.4 и 2.5, имеют один и тот же вид, поэтому в дальнейшем рассматриваются лишь механические характеристики двигателей.
Механические характеристики, полученные при отсутствии внешнего сопротивления в якорной цепи (при Rx = 0), номинальном значении напряжения питания и номинальном магнитном потоке возбуждения, называются естественными – «емх», а все остальные – являются искусственными механическими характеристиками.
В двигательном режиме работы «емх» ДПТ с параллельной ОВ (рис.2.1, а) согласно 2.4 имеет вид прямой (кривая 1, рис.2.2). Ее можно рассчитать и построить по номинальным паспортным данным двигателя. Искусственные механические характеристики можно получить, изменяя следующие параметры двигателя (рис.2.4): Rx - кривая 1, Uя – кривая 2, Rp – кривая 3. Как следует из этого рисунка, изменяя те же параметры, можно регулировать угловую частоту вращения ДПТ: на рис.2.4 кривая 4 представляет собой механическую характеристику рабочей машины, ее пересечение с кривыми «емх», 1, 2 и 3 показывает рабочие точки электропривода – ω1, ω2, ω3, ω4.

|
Рис. 2.4. Искусственные механические характеристики ДПТ с параллельной ОВ. |
Рис. 2.5. Схема включения ДПТ с параллельной ОВ для работы в режиме динамического торможения. |
Анализ механических и электромеханических характеристик ДПТ позволяет сделать следующие выводы:
- на «емх» при пуске двигателя возникают большие токи в якорной цепи;
- введение сопротивления в цепь якоря двигателя (Rx > 0) уменьшает жесткость характеристик и снижает пусковой ток;
- уменьшение напряжения питания на якоре двигателя перемещает его характеристики параллельно «емх» вниз, пропорционально Uc;
- уменьшение напряжения на ОВ двигателя приводит к пропорциональному уменьшению тока в ней и, как следствие, снижению магнитного потока (Ф), т.е. возрастанию угловой частоты вращения якоря ω.
ДПТ с параллельной ОВ может работать (рис.2.3) как в основном режиме – двигательном (ДР), так и в тормозных режимах, в том числе генераторного торможения (ГТ), торможения противовключением (ПВ), динамического торможения (ДТ) и тормозного спуска (ТС).
Uc
= Const;
ω
ωо,
Iя
– меняет знак
на противоположный
(
-
Iя
);
Мт
= к
Ф (-
Iя)
–
тормозной момент;
 ;
Ея
Uс,
;
Ея
Uс, 1.
Генераторное торможение
(ГТ) с отдачей энергии в сеть.
Тормозной
режим получается при постоянном
напряжении сети (Uс
= Сonst)
и активном моменте на валу ЭД, обусловленным
опускающимся грузом. В результате,
угловая скорость
якоря ω,
становится больше
скорости идеального холостого хода
ωо,
т.е.
ω
ωо.
При
этом ЭДС
якоря
Ея
становится
больше приложенного напряжения сети
Uс,
т.е.
Ея
Uс
и ток якоря
Iя
под воздействием
ЭДС меняет свой знак на противоположный
(- Iя),
в результате электромагнитный момент
становится
отрицательным, т.е. тормозным - Мт.
Электродвигатель начинает работать
в режиме генератора параллельно с сетью,
которой он отдает электроэнергию.
1.
Генераторное торможение
(ГТ) с отдачей энергии в сеть.
Тормозной
режим получается при постоянном
напряжении сети (Uс
= Сonst)
и активном моменте на валу ЭД, обусловленным
опускающимся грузом. В результате,
угловая скорость
якоря ω,
становится больше
скорости идеального холостого хода
ωо,
т.е.
ω
ωо.
При
этом ЭДС
якоря
Ея
становится
больше приложенного напряжения сети
Uс,
т.е.
Ея
Uс
и ток якоря
Iя
под воздействием
ЭДС меняет свой знак на противоположный
(- Iя),
в результате электромагнитный момент
становится
отрицательным, т.е. тормозным - Мт.
Электродвигатель начинает работать
в режиме генератора параллельно с сетью,
которой он отдает электроэнергию.
 2.
Торможение противовключением (ПВ).
Искусственное
изменение полярности (плюс на минус):
Uс
- меняет
знак на противоположный
(- Uс),
направление ЭДС
Ея
не изменяется и
совпадает с
направлением напряжения Uс.
Ток якоря
Iя
меняет знак
на противоположный (-
Iя),
в результате электромагнитный момент
становится
отрицательным, т.е. тормозным - Мт
- точка 2, быстрая остановка электродвигателя,
точка 3.
2.
Торможение противовключением (ПВ).
Искусственное
изменение полярности (плюс на минус):
Uс
- меняет
знак на противоположный
(- Uс),
направление ЭДС
Ея
не изменяется и
совпадает с
направлением напряжения Uс.
Ток якоря
Iя
меняет знак
на противоположный (-
Iя),
в результате электромагнитный момент
становится
отрицательным, т.е. тормозным - Мт
- точка 2, быстрая остановка электродвигателя,
точка 3.
 3.
Динамическое торможение (ДТ). Обмотка
якоря отключается от сети и замыкается
на внешнее сопротивление Rx,
т.е. Uc
= 0. Обмотка возбуждения
остается подключенной к номинальному
напряжению Uс.
Якорь продолжает вращаться за счет
запасенной кинетической энергии, как
и в двигательном режиме, поэтому
направление ЭДС Ея
не изменяется (остается), а ток якоря Iя
меняет знак
на противоположный (-
Iя),
т.к. напряжение
на обмотке якоря равно нулю -
Uоя
= 0.
Поэтому электромагнитный
момент становится
тормозным -
Мт
- (участок 2 - 0).
3.
Динамическое торможение (ДТ). Обмотка
якоря отключается от сети и замыкается
на внешнее сопротивление Rx,
т.е. Uc
= 0. Обмотка возбуждения
остается подключенной к номинальному
напряжению Uс.
Якорь продолжает вращаться за счет
запасенной кинетической энергии, как
и в двигательном режиме, поэтому
направление ЭДС Ея
не изменяется (остается), а ток якоря Iя
меняет знак
на противоположный (-
Iя),
т.к. напряжение
на обмотке якоря равно нулю -
Uоя
= 0.
Поэтому электромагнитный
момент становится
тормозным -
Мт
- (участок 2 - 0).
 4.
Тормозной спуск (ТС). Мс
Мдв. Под действием
груза изменяется Мс
в сторону увеличения и становится больше
момента, развиваемого электродвигателем,
т.е. Мс
Мдв. При этом
напряжение сети Uс
и
ЭДС
Ея
по направлению
совпадают,
а
ЭДС Ея
и
угловая частота
вращения якоря
ω
меняют знак на
противоположный. Тормозной спуск (ТС)
соответствует точкам 3-4.
4.
Тормозной спуск (ТС). Мс
Мдв. Под действием
груза изменяется Мс
в сторону увеличения и становится больше
момента, развиваемого электродвигателем,
т.е. Мс
Мдв. При этом
напряжение сети Uс
и
ЭДС
Ея
по направлению
совпадают,
а
ЭДС Ея
и
угловая частота
вращения якоря
ω
меняют знак на
противоположный. Тормозной спуск (ТС)
соответствует точкам 3-4.
Мс Мдв;
 .
.
ω – меняет знак на противоположный ( - ω );
Ея = к Ф (- ω).
Одно из ценных свойств ДПТ с параллельной ОВ заключается в том, что скорость его вращения ω очень мало зависит от нагрузки. Электродвигателю присущи высокая перегрузочная способность и широкий диапазон регулирования угловой частоты вращения ω.
В двигательном режиме (ДР) направление момента М совпадает с направлением угловой частоты вращения ω, а ЭДС Ея направлена на встречу току якоря Iя.
В тормозных режимах момент М направлен на встречу угловой частоте вращения ω, а направление ЭДС Ея совпадает с направлением тока якоря Iя.
На рис. 2.6. представлена сводная диаграмма основных режимов работы ДПТ с параллельной ОВ, на которой представлено распределение приложенного напряжения Uс, ЭДС Ея и тока якоря Iя.

Рис. 2.6. Диаграмма режимов работы ДПТ с параллельной ОВ
Для всех схем включения ДПТ, приведенных на рис.2.1, величина тока в цепи якоря определяется по выражениям:
при работе в двигательном режиме и в режиме генераторного торможения
 , А (2.6)
, А (2.6)
(в двигательном режиме Uc > Eя и энергия потребляется из сети, в генераторном – Uc < Eя и энергия отдается в сеть);
при работе в режиме динамического торможения (сеть отключена – Uc = 0)
 , А (2.7)
, А (2.7)
при работе в режиме торможения противовключением (изменена полярность Uc)
 , А (2.8)
, А (2.8)
при работе в режиме тормозного спуска
 , А (2.9)
, А (2.9)
Механические характеристики ДПТ с последовательной ОВ и со смешанной ОВ, как следует из уравнений 2.1…2.3, являются нелинейными. Их нелинейность объясняется тем, что последовательно с обмоткой якоря включена обмотка возбуждения, по которой протекает ток нагрузки. Следовательно, магнитный поток этих двигателей зависит от величины тока якоря и является переменной величиной. Поэтому системы уравнений 2.4 и 2.5 , описывающие характеристики двигателей, являются нелинейными (нелинейность объясняется наличием цепей намагничивания двигателя, которые не имеют аналитического описания). Эти уравнения дают лишь представление о характере электромеханической и механической характеристик данных двигателей.
В целом, механические характеристики ДПТ с последовательной ОВ и со смешанной ОВ аналогичны механическим характеристикам ДПТ с параллельной ОВ, приведенным на рис.2.3.
В них имеются два принципиальных отличия.
Во-первых, это нелинейные
характеристики – как показано на
рис.2.2. Во-вторых, у ДПТ с последовательной
ОВ отсутствует скорость идеального
холостого хода ωо
(при М
 0 -Iв
= Iя
0 -Iв
= Iя
 0 и, как следствие,
Ф
0 и, как следствие,
Ф
 0, где Iв
– величина тока в обмотке возбуждения,
следовательно - ω
0, где Iв
– величина тока в обмотке возбуждения,
следовательно - ω ).
Поэтому у этих двигателей неосуществим
режим генераторного торможения, переход
в который возможен только при увеличении
угловой частоты вращения якоря до
величины, большей скорости холостого
хода. ДПТ с последовательной ОВ нельзя
эксплуатировать при нагрузке, меньшей
25…30 % от номинальной (иначе угловая
частота вращения якоря превысит в
несколько раз номинальную скорость
вращения и двигатель пойдет «вразнос»).
).
Поэтому у этих двигателей неосуществим
режим генераторного торможения, переход
в который возможен только при увеличении
угловой частоты вращения якоря до
величины, большей скорости холостого
хода. ДПТ с последовательной ОВ нельзя
эксплуатировать при нагрузке, меньшей
25…30 % от номинальной (иначе угловая
частота вращения якоря превысит в
несколько раз номинальную скорость
вращения и двигатель пойдет «вразнос»).
К преимуществам этих ДПТ
относятся возможность плавного разгона
двигателей в зоне больших нагрузок, а
также не критичность к перегрузкам. У
ДПТ с параллельной ОВ величина тока в
якорной цепи пропорциональна моменту
нагрузки (т.е. I
 М), а ДПТ с
последовательной ОВ и со смешанной ОВ
– I
М), а ДПТ с
последовательной ОВ и со смешанной ОВ
– I
 .
Поэтому они менее критичны к перегрузкам
и используются в качестве тягового
электропривода. Для всех типов ДПТ при
мощности более 1 кВт требуется осуществлять
ограничение пусковых токов и моментов,
как в режиме трогания, так и в тормозных
режимах работы. Это достигается включением
последовательно с обмоткой якоря
добавочного сопротивления Rx,
выбираемого таким образом, чтобы
максимальные величины тока якоря и
момента не превышали в 2,0…2,5 раза их
номинальных паспортных значений.
.
Поэтому они менее критичны к перегрузкам
и используются в качестве тягового
электропривода. Для всех типов ДПТ при
мощности более 1 кВт требуется осуществлять
ограничение пусковых токов и моментов,
как в режиме трогания, так и в тормозных
режимах работы. Это достигается включением
последовательно с обмоткой якоря
добавочного сопротивления Rx,
выбираемого таким образом, чтобы
максимальные величины тока якоря и
момента не превышали в 2,0…2,5 раза их
номинальных паспортных значений.
Направление вращения ДПТ считается правым, когда якорь двигателя вращается по часовой стрелке, если смотреть со стороны конца приводного вала. При вращении вала против часовой стрелки направление вращения считается левым. Изменение направления вращения ДПТ осуществляется только за счет изменения полярности напряжения питания в цепи якоря. Изменение направления вращения ДПТ за счет изменения полярности напряжения питания в цепи параллельной ОВ проводить не рекомендуется. Во время работы ДПТ запрещается обесточивать его параллельную ОВ.