

Колебания. Общие понятия.
Физические процессы, характеризующиеся определенной
повторяемостью…
Период колебаний – время одного полного к – ия … |
Т |
||
|
|
1 |
|
T |
|||
Частота колебаний – ч. полных к- ий за 1 сек. |
|
||
Циклическая ( круговая ) частота колебаний |
|
2 |
|
|
|
|
|
|
|
sin( t ) |
|
Гармонические колебания… |
|
cos( t ) |
|
|
|
|
|
|
|
|
|
Механические колебания ( свободные, вынужденные,
автоколебания, параметрические )...
Электрические колебания (свободные, вынужденные )…
Свободные колебания в механической системе
1. Свободные колебания: колебания в системе, выведенной из положения равновесия и предоставленной самой себе.
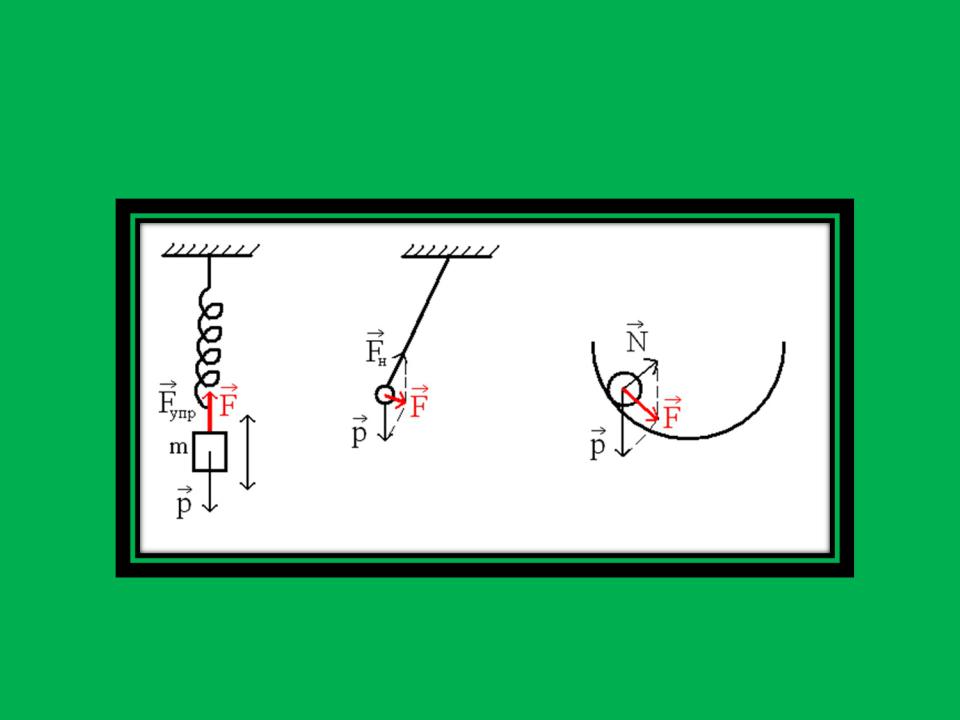
Необходимое условие существования свободных колебаний в механической системе: наличие силы, направленной к положению равновесия .  Упругая, квазиупругая сила…
Упругая, квазиупругая сила…
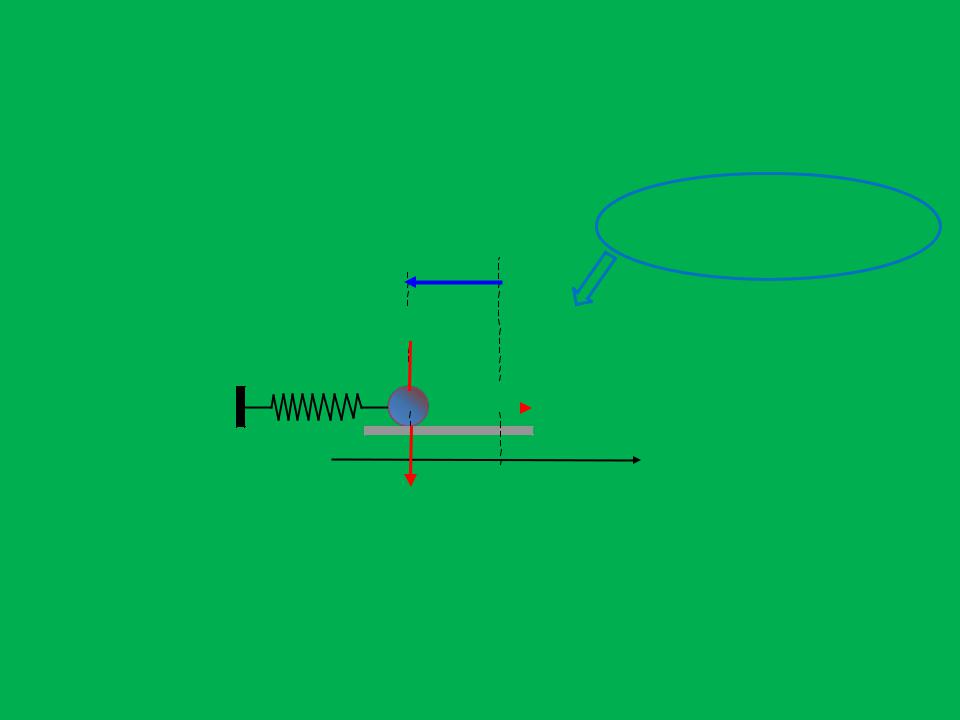
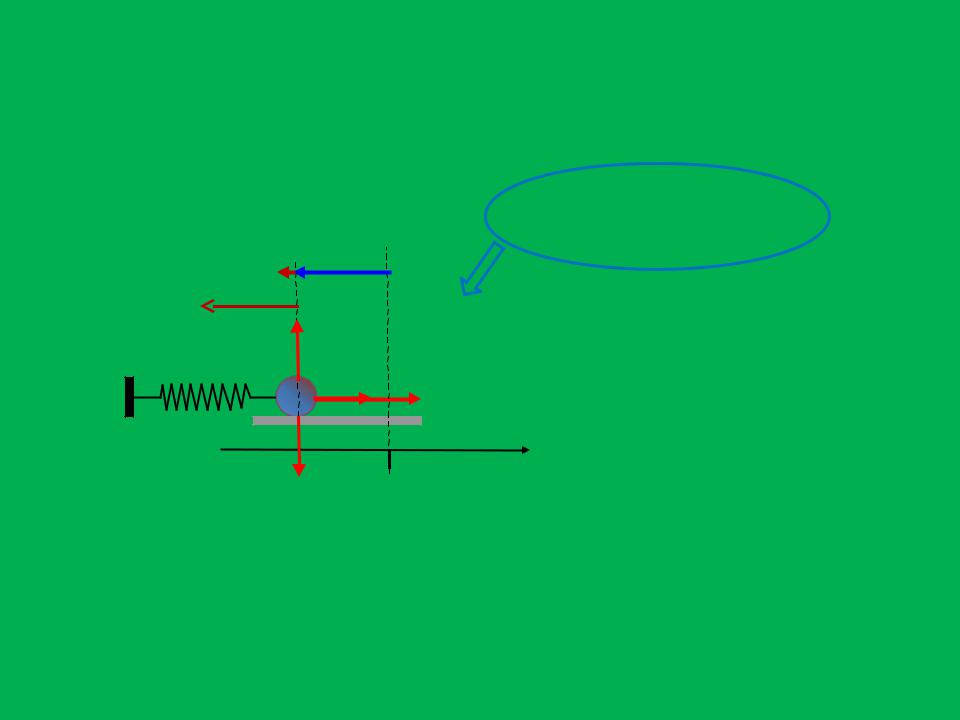
2. Модель свободных колебаний в механической системе. На рис.:
деформация сжатия
r
 N
N
m 
 Fynp
Fynp
x
x 0 |
|
|
|
|
x 0 |
|
|
|
|
|
|||
|
|
|
|
|||
P |
0 |
|||||
|
|
|||||
|
|
|
|
На рис.: |
|
r |
|
|
деформация |
dr |
|
|
сжатия; |
|
|
|
|
||
|
|
|
налево |
|
|
|
|
|
движение м.т. |
|
N |
|
|
|
m |
|
FTp |
Fynp |
|
|
|
|
x |
|
|
|
|
|
|
x 0 |
P |
0 |
x 0 |
|
|
|
|
||

|
dr |
|
|
|
r |
|
|
|
|
|
|
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||
|
|
N |
|
|
|
|
|
|
|
|
|
|
|
Fynp r |
|
(Fynp )x x |
Зак |
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||
|
|
|
|
|
|
|
|
|
|
|||||||||||||||
|
|
|
|
|
|
|
|
|
|
|||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
|
|
m |
|
|
|
|
|
FTp |
|
|
|
|
|
|
F |
|
он |
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||
|
|
|
|
|
|
|
|
|
|
|||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
ynp |
|
|
(FTp )x dx dt |
Гука |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
x |
FTp |
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
x 0 |
P |
|
|
|
|
|
|
|
|
|
|
|
|
|
x 0 |
|
|
r |
|
|||||
|
|
|
|
0 |
|
|
|
|
|
(FTp )x x& |
|
|||||||||||||
P N
2-ой з-н Ньютона:
ma Fynp FTp P N |
|
О |
|
||
|
||
|
|
Х: |
mx& x x& 0 0
Докажем, что при определенных условиях х(t) может меняться по гармоническому закону, т.е. в исследуемой механической системе могут существовать гармонические колебания.
Комплексные числа
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
x% a ib (cos isin ) ei |
|||||||||||||||
Im |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Re x% a cos |
|||||||||||
b |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
A |
Im x% b sin |
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
a2 b2 |
|||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
0 |
|
|
|
|
|
|
|
|
a |
R |
|
|||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
e |
|
3. Решение однородного дифференциального уравнения 2-го порядка при помощи комплексных чисел
&x |
x |
|
x& 0 |
|
02 |
|
2 |
|
m |
m |
|||||
|
m |
m |
|
|
|||
|
|
0 , |
Действительные |
|
||||
|
|
числа, |
|
|
||||
|
|
|
характеризующие |
|
||||
|
|
|
систему. |
|
||||
|
|
|
|
|||||
|
&x 02 x 2 x& 0 |
x(t) - Решение ур |
||||||
|
|
|
|
|
|
|
- ия |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
x%(t-)Решение ур - ия x(t) Re x%(t) |
|
|
|
|
|
|
|
|
||
|
& |
2 |
& |
|
|
|
||
|
x% 0 x% 2 x% 0 |
|
|
|
|
|||
|
|
|
|
|
|
|||
|
Ищем решение в |
|
a(t) ? ? ? |
|||||
|
виде: |
x% a(t)ei( t ) |
||||||
|
|
|
|
|
|
|
||
x% a(t)ei( t ) |
& |
i( t ) |
i( t ) |
||
|
|
x% ae& |
|
|
ai e |
& |
i ( t ) |
i ( t ) |
|
|
|
x% |
ae& |
ai& e |
|
|
|
|
|
|
|
|
|
ai& ei ( t ) a ( i )2 ei ( t )
|
|
|
|
|
|
|
|
|
|
|
|
|
& |
2 |
& |
|
|
|
x% 0 x% 2 x% 0 |
|
|
||
|
|
|
|
|
i( t ) |
После подстановки и сокращенияeна |
|||||
a& ai& :ai& a 2 a 02 2 a& 2 ai 0
Равенство нулю реальной и мнимой частей приводят к двум
уравнениям: |
2 |
2 |
) 2 a& 0 |
1. Re : a& a( 0 |
|
||
2. Im : a& a 0
|
Im : |
a& a 0 |
da |
da |
|
|
||
2. |
dt a a dt |
|||||||
|
|
|
|
|
|
|
|
|
|
da |
|
|
dt ln a t ln a |
|
|
|
|
|
a |
|
|
0 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
a(t) a0e t , гдеa0 |
- любое |
|
|
|
|
|
|
|
|
число |
|
|
1. Re : a& a( 02 2 ) 2 a& 0 |
|
|
||||||
|
|
|
||||||
a& a e t ; a 2a e t ; |
2 ( 02 |
2 ) 2 2 0 |
||||||
|
|
0 |
|
& |
0 |
|
|
|
x Re a0e tei( t ) a0e t cos( t )
x a |
e t cos( t ), где a |
|
, |
- любые |
|
|
0 |
числа |
0 |
|
|
|
|
|
|
02 2 |
0 |
|||
|
|
|
||||
4. Свободные колебания без затуханий
|
|
З-н сохр.полн.мех.энергии: |
||
0 0 0 ; a a0 |
|
x |
2 |
mx& |
|
|
|
2 |
|
|
|
2 |
2 const. |
|
|
||||
x a0 cos( 0t ) |
Амплитуда колебаний |
||||
a0 max |
|
x |
|
0 |
|
|
|
||||
|
|
|
|
|
|
a0 |
T |
Определяется… |
a0 cos |
0 |
|
|
Фаза колебаний |
|
0 |
|
|
|
( 0t ) |
|
|
|
a0
|
Начальная фаза колебаний |
|
x(t 0) a0 cos |
||
Определяется моментом начала |
||
|
отсчета времени. |
x a0 |
cos( 0t ) |
|
|
Начальная фаза колебаний. |
|||
|
|
||
x |
|
Определяется моментом начала |
|
|
отсчета времени. |
||
|
|
a0
0 |
t |
a0
 t 0 x a0
t 0 x a0
 t 0 x 0
t 0 x 0
2
t 0 x a0 0
T0 
Собственная частота и собственный период колебаний системы
0 1
T0
Собственная циклическая частота колебаний системы
0 |
|
2 0 |
|
m |
|||
|
|
T  Период колебаний – мин. время, 0 через кот. повторяется мех.
Период колебаний – мин. время, 0 через кот. повторяется мех.
состояние системы.
cos( 0t ) cos 0 (t T0 )
0T0 2
0 2 2 0
T0
|
T0 |
0 |
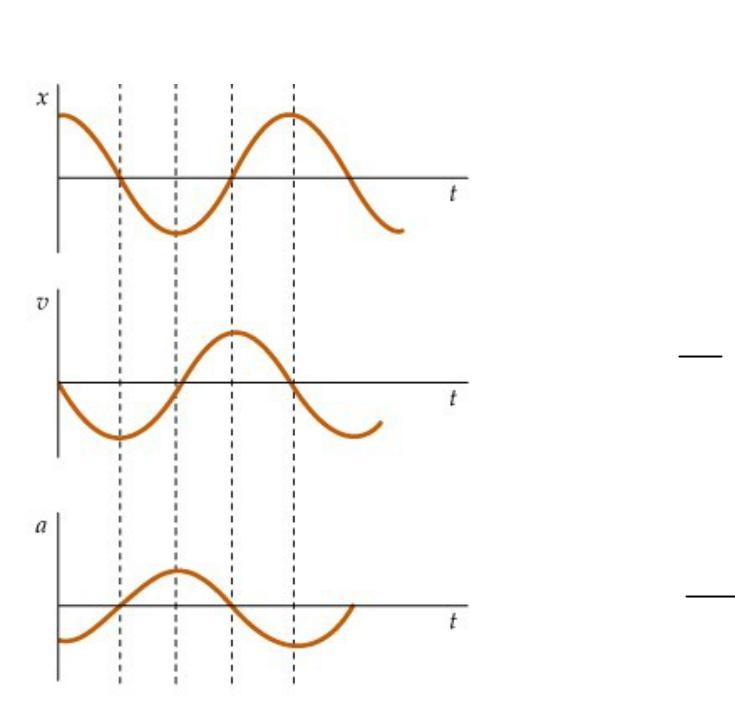
x a0 cos 0t |
dxdt x&
a d &x dt