

Slides_OEVM_final
.pdfЛекция 7. |
|
|
Устройство управления: |
|
||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
с жесткой логикой |
|
|
|
|
|
|
|||||
|
|
|
Синтез микропрограммного автомата Мили |
|
|
|||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Начало |
Y0 |
||
|
|
|
|
y4 |
|
|
|
|
|
|
y |
|
|
|
|
|
1 |
|
|
a1 |
|
|||
|
|
|
|
|
|
|
|
|
|
3y |
|
|
|
|
x |
|
|
|
||||||
|
|
|
y3 |
|
|
|
|
|
a |
|
|
|
4 |
1 |
|
|
|
|
|
|
|
|||
|
|
x3 |
|
|
|
|
|
|
|
1 |
|
|
|
|
|
|
|
1 |
|
|
||||
|
|
x |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
1 |
|
|
|
x1 |
|
|
|
|
|
|
x |
|
|
Y1 |
y1y2 |
|
|
|
|
0 |
|
|
|
|
y |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
y2 |
x |
|
|
|
|
1x |
|
|
|
|
|
|
|
|
0 |
|||||||
|
|
8 |
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||
|
|
y1 |
|
|
x1 |
2 |
|
|
|
2 |
y |
|
a |
|
|
x2 |
|
|
||||||
|
|
|
|
y3 |
|
|
|
|
|
|
|
|
|
2 |
|
|
|
|
|
|||||
xx |
|
|
4 |
|
|
|
|
|
|
6y |
1 |
x3 |
|
1 |
|
Y7 |
y6y7 |
|||||||
a2 |
y1 |
|
y |
|
|
|
|
( |
|
7 |
|
|
|
|||||||||||
1 |
3 |
|
|
|
|
|
|
|
|
|
|
- |
|
|
|
|
|
|
y1y3 |
Y5 |
||||
|
|
|
|
|
y 3 |
|
|
|
|
|
) |
|
Y2 |
y4 |
0 |
|
|
|||||||
|
|
x y |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
a5 |
a3 |
|
|
|
|
|
|
|
||||||
|
|
3 |
|
8 |
|
|
|
|
|
|
|
|
|
0 |
|
|
|
|
|
|
||||
|
|
y |
y |
|
|
|
|
|
|
|
|
|
x |
|
x4 |
|
|
|
|
|
|
|||
|
|
8 |
|
4 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
4 |
x |
|
|
|
x |
|
5 |
|
|
|
|
|
0 |
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
1 |
x1 |
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
|
x |
|
x |
1 |
|
|
|
|
5 |
|
|
|
|
|
|
|
|
|
a5 |
||||
|
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
Y3 |
y5y6y7 |
|
|
|
|
|
|
|
|
|
x |
|
|
|
|
x |
|
|
y y |
|
|
|
|
1 |
|
|
|
|
Y6 |
y3y4 |
|||
|
|
4 |
a3 |
|
|
|
|
|
y |
|
|
|
a4 |
|
|
|
|
|||||||
|
|
|
|
|
4 |
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
5 |
6 |
|
|
|
|
0 |
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
7 |
a |
4 |
|
x5 |
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
y8 |
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1 Y4 |
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
© С. Г. Мосин, 2007 |
|
|
|
|
|
|
|
|
|
a1 |
|
|
|
|
|
|
191 |
|||||
|
|
|
|
|
|
|
|
|
|
Yk |
Конец |
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
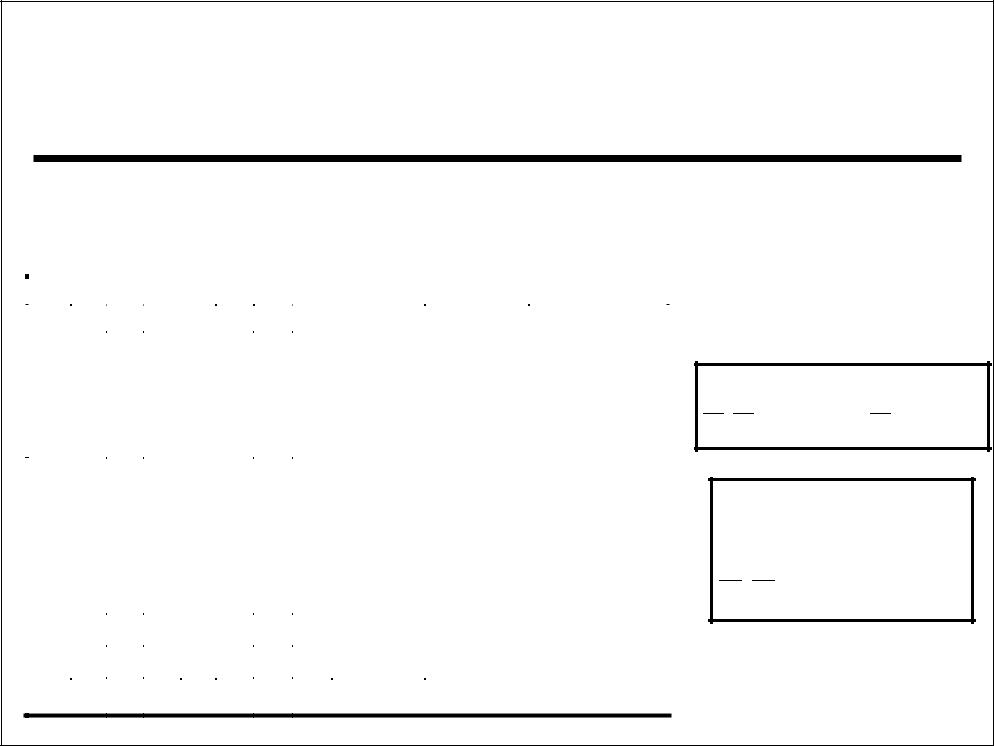
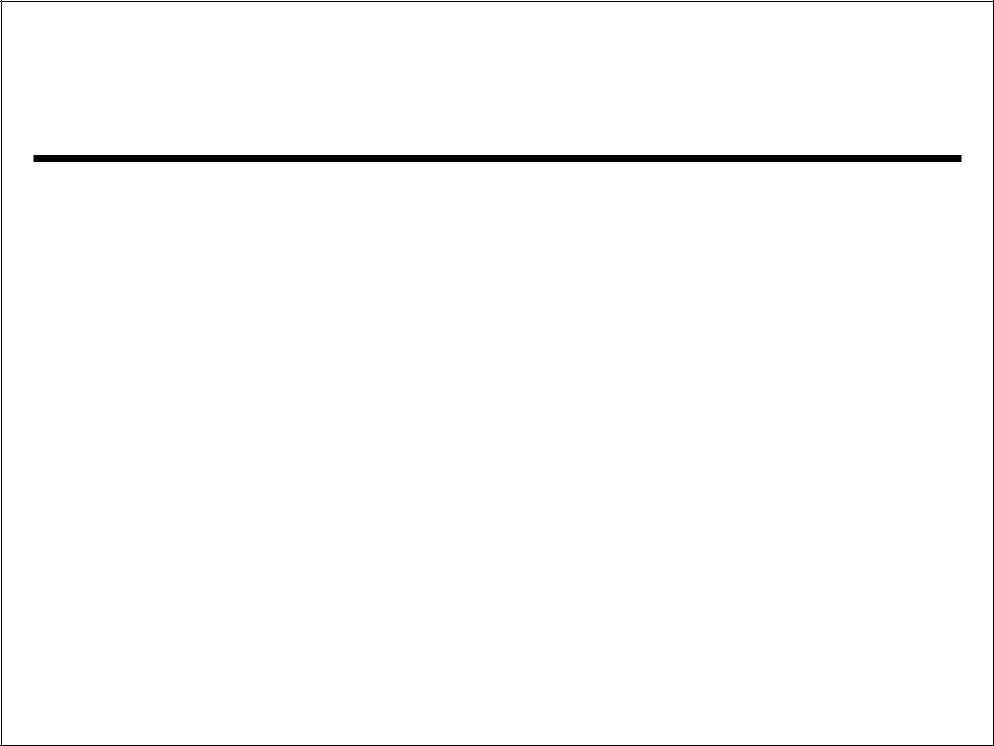
Лекция 7. Устройство управления:
с жесткой логикой
Синтез микропрограммного автомата Мили Обратная таблица переходов
am |
|
K(am) |
|
as |
K(as) |
X(am, as) |
Y(am, as) |
Сигнал |
||
Q3 Q2 |
Q1 |
Q3 |
Q2 Q1 |
возбуждения |
||||||
a2 |
0 |
1 |
|
0 |
|
|
|
x1x3 |
y3 y4 |
D1 |
a3 |
0 |
1 |
|
1 |
a1 |
0 0 1 |
x1x4 |
y3 y4 |
D1 |
|
a4 |
1 |
0 |
|
0 |
x5 |
– |
D1 |
|||
a5 |
1 |
0 |
|
1 |
|
|
|
1 |
y3 y4 |
D1 |
a1 |
0 |
0 |
|
1 |
|
|
|
x1 |
y1y2 |
D2 |
a1 |
0 |
0 |
|
1 |
|
|
|
x1x2 |
y1y2 |
D2 |
a2 |
0 |
1 |
|
0 |
a2 |
0 1 0 |
x3x1 |
y8 |
D2 |
|
a3 |
0 |
1 |
|
1 |
|
|
|
x4 x1 |
y8 |
D2 |
a4 |
1 |
0 |
|
0 |
|
|
|
x5 |
y8 |
D2 |
a2 |
0 |
1 |
|
0 |
a3 |
0 1 1 |
x3 |
y4 |
D2 D1 |
|
a3 |
0 |
1 |
|
1 |
a4 |
1 0 0 |
x4 |
y5 y6 y7 |
D3 |
|
a1 |
0 |
0 |
|
1 |
a5 |
1 0 1 |
x1x2 |
y6 y7 |
D3 D1 |
|
|
© С. Г. Мосин, |
2007 |
|
|
|
|
|
|||
D3 = a1x1x2 a3x4 = Q3Q2Q1x1x2 Q3Q2Q1x4
y1 = a1x1 a1x1x2 = a1(x1 x1x2 )=
Q3Q2Q1(x1 x1x2 )
192
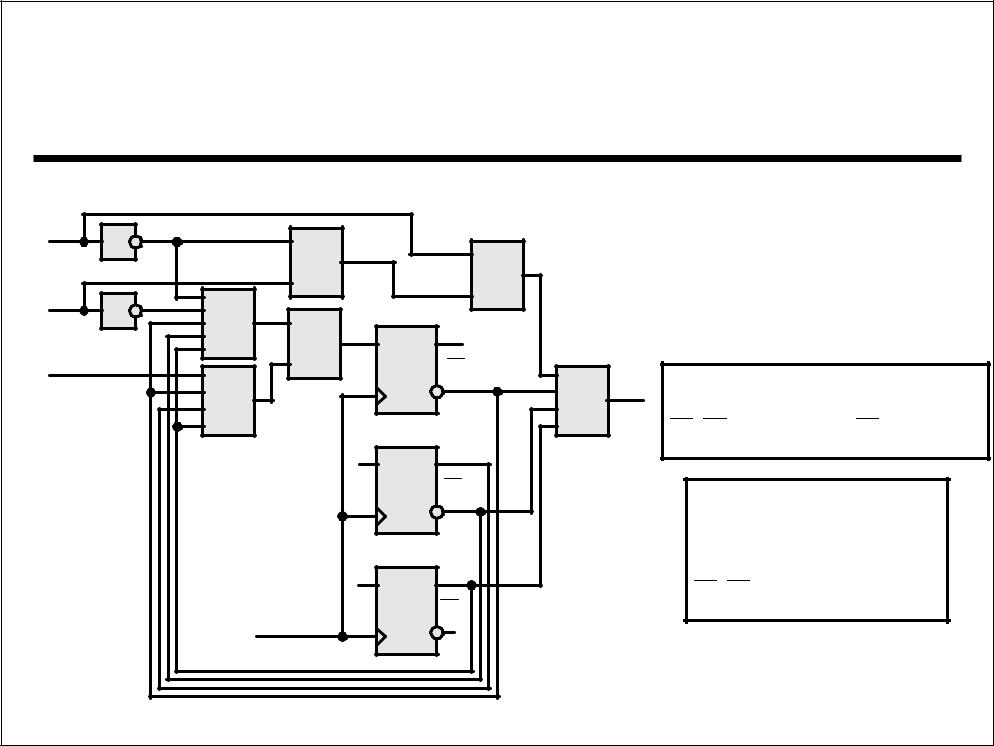
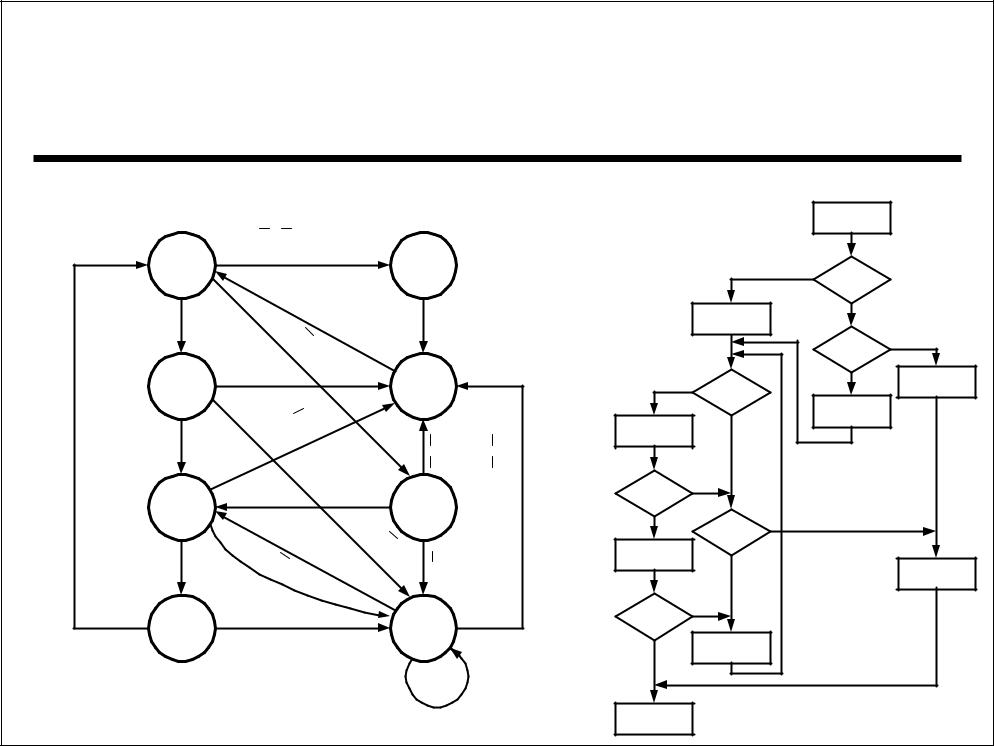
Лекция 7. Устройство управления:
с жесткой логикой
x1 |
|
Синтез микропрограммного автомата Мили |
|
|||||
1 |
& |
|
|
|
|
|
|
|
|
|
1 |
|
|
|
|
||
|
|
|
|
|
|
|
|
|
x2 |
1 |
& |
|
|
|
|
|
|
|
Q3 |
|
|
|
|
|
||
|
|
1 |
|
|
|
|
|
|
x4 |
|
|
D3 |
|
|
|
|
|
|
& |
Q3 |
& |
y |
|
D3 = a1x1x2 a3x4 |
= |
|
|
|
1 |
||||||
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
Q2 |
|
|
|
Q3Q2Q1x1x2 Q3Q2Q1x4 |
|
|
|
|
D2 |
|
|
|
|
|
|
|
|
Q2 |
|
|
|
y1 = a1x1 a1x1x2 = |
|
|
|
|
|
|
|
|
||
|
|
|
Q1 |
|
|
|
a1(x1 x1x2 )= |
|
|
|
|
|
|
|
Q3Q2Q1(x1 x1x2 ) |
||
|
|
|
D1 |
|
|
|
||
|
|
clk |
Q1 |
|
|
|
||
|
|
|
|
|
|
|
||
|
© С. Г. Мосин, 2007 |
|
|
|
|
|
193 |
|
|
|
|
|
|
|
|
||
Лекция 7. Устройство управления:
с жесткой логикой
Синтез микропрограммного автомата Мура
1. Формирование отмеченной ГСА; |
|||||||
2. Построение графа автомата. |
|||||||
|
a1 |
x1x2 |
|
|
a8 |
y6y7 |
|
|
|
|
1 |
|
|||
1 |
|
|
|
1 |
|
||
|
|
|
|
|
|||
x |
|
|
x |
|
|
||
|
|
|
|
|
|
||
|
|
x1x3 |
1x |
|
|
y3y4 |
|
y1y2 |
a2 |
|
2 |
|
a7 |
||
|
x |
|
|
||||
|
|
|
|
3 |
3 |
||
|
|
x |
4 |
|
|||
|
|
|
|
x |
x |
||
3 |
|
1 |
|
|
|||
x |
|
|
|
|
|
1 |
1 |
|
|
|
|
x3 |
x |
x |
|
y4 |
a3 |
|
|
|
a6 |
y1y3 |
|
|
x |
x |
|||||
|
|
|
|
|
|||
|
|
x |
1x |
3 |
|
||
4 |
|
3 |
3 |
x |
|
||
1x |
|
|
|
1 |
|
||
x |
|
4 |
|
|
|
x |
|
y5y6y7 |
a4 |
x5 |
|
|
|
a5 |
y8 |
|
|
|
|
|
|
||
|
|
|
|
|
|
x1x3 |
|
© С. Г. Мосин, 2007 |
|
|
|
|
|
|
|
|
|
|
|
Начало |
a1 |
||
|
|
|
|
1 |
x1 |
|
|
|
|
|
|
|
|
|
|
|
|
a |
y1y2 |
|
0 |
|
|
|
|
2 |
|
|
x2 |
0 |
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
1 |
x3 |
1 |
a8 |
|
y6y7 |
|
|
|
y1y3 |
a |
|
||
a3 |
|
y4 |
0 |
6 |
|||
|
|
|
|
||||
|
|
|
|
|
|||
|
|
x4 |
0 |
|
|
|
|
|
|
|
0 |
|
|
|
|
|
1 |
|
x1 |
|
|
|
|
|
|
|
|
|
|
||
a4 |
y5y6y7 |
1 |
|
a7 |
|
y3y4 |
|
|
|
|
|
|
|||
|
|
x5 |
0 |
|
|
|
|
|
|
|
|
|
|
|
|
|
1 |
a5 |
y8 |
|
|
|
|
a1 |
Конец |
|
|
|
|
194 |
|
|
|
|
|
|
|
|
|

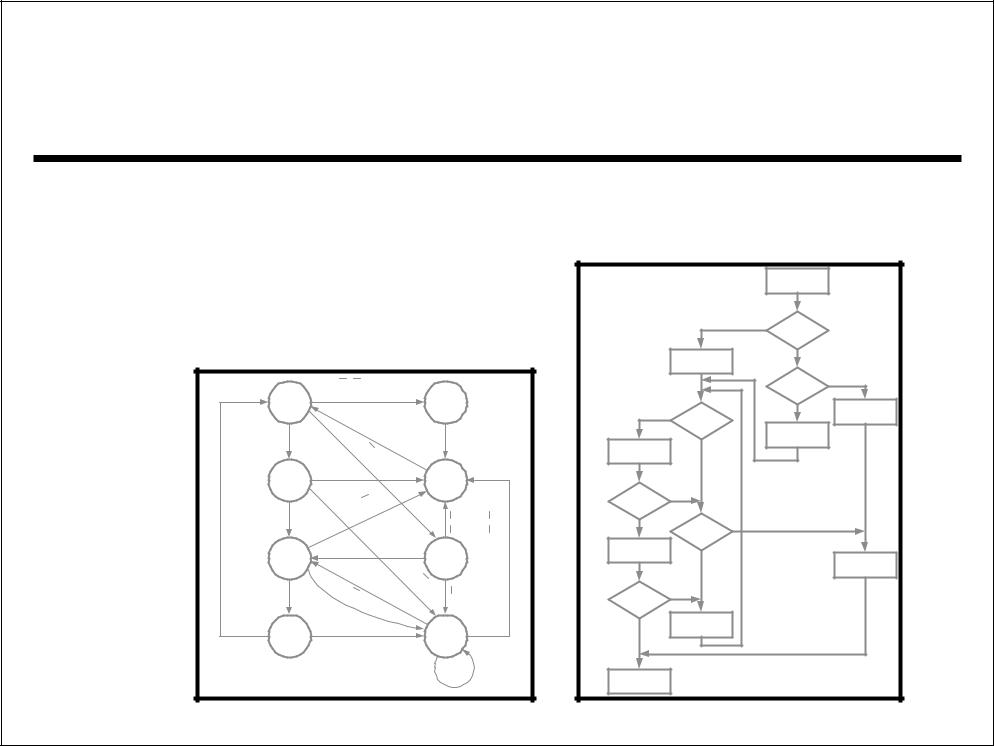
Лекция 7. Устройство управления:
с жесткой логикой
Синтез микропрограммного автомата Мура
На этапе получения отмеченной ГСА начальная, конечная и операторные вершины отмечают символами а1, а2, … по следующим правилам:
1)Символом а1 отмечают начальную и конечную вершины;
2)Различные операторные вершины отмечают различными символами;
3)Все операторные вершины должны быть отмечены.
При синтезе автомата Мура отмечают не сами операторные вершины. Число отметок на единицу больше числа операторных вершин в ГСА.
195
© С. Г. Мосин, 2007
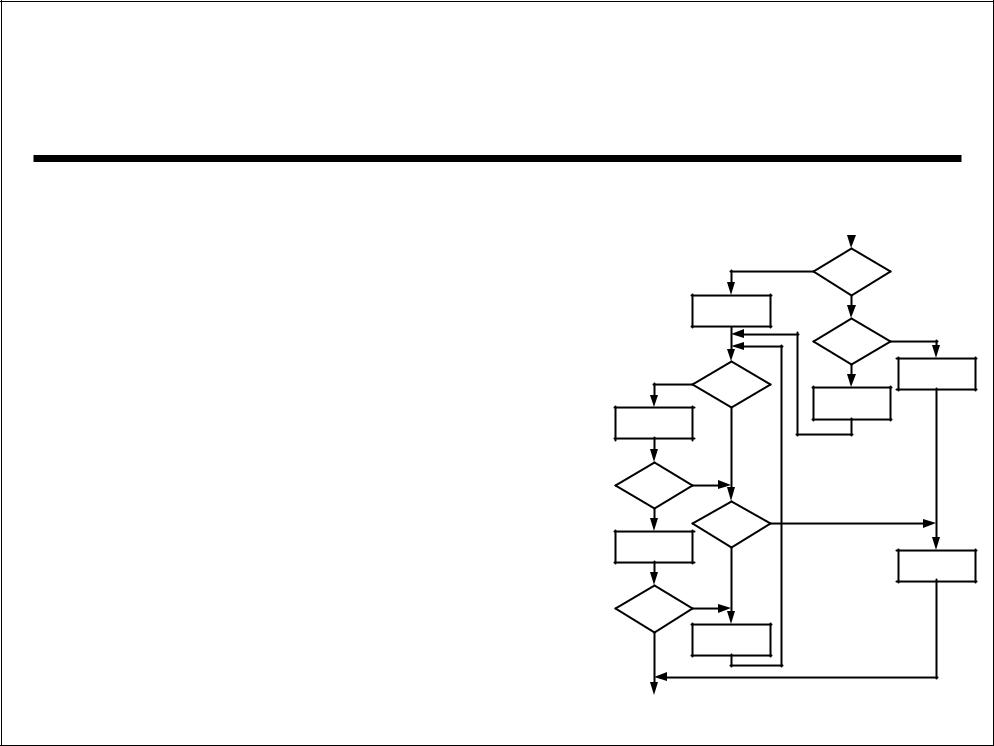
Лекция 7. Устройство управления:
с жесткой логикой
Синтез микропрограммного автомата Мура |
|
|
|
Начало |
a1 |
||
|
|
|
|
1 |
x1 |
|
Построение графа автомата Мура начинают с нахождения в отмеченной ГСА путей перехода.
Состояниями графа являются полученные отметки а1, а2, …
|
|
a2 |
y1y2 |
0 |
|
0 |
|
|
|
|
|
x2 |
|
||
|
|
|
|
|
|
|
|
|
|
1 |
x3 |
1 |
a8 |
|
y6y7 |
|
|
|
y1y3 |
|
a |
|
|
a3 |
|
y4 |
0 |
|
6 |
||
|
|
|
|
||||
|
|
|
|
|
|||
|
|
x4 |
0 |
|
|
|
|
|
|
|
0 |
|
|
|
|
|
1 |
|
x1 |
|
|
|
|
|
|
|
|
|
|
||
a4 |
y5y6y7 |
1 |
|
a7 |
|
y3y4 |
|
|
|
|
|
|
|||
|
|
x5 |
0 |
|
|
|
|
|
|
|
|
|
|
|
|
|
1 |
a5 |
y8 |
|
|
|
|
|
|
|
196 |
|
© С. Г. Мосин, 2007 |
a1 |
Конец |
||
|
Лекция 7. Устройство управления:
с жесткой логикой
Синтез микропрограммного автомата Мура Правила определения переходов и выходных сигналов в автомате Мура по ГСА:
1.Каждому пути перехода amX(am,as) as ставят в соответствие переход автомата S из состояния аm в состояние as под действием входного сигнала X(аm, as);
2.Каждому пути перехода amas ставят в соответствие переход автомата S из состояния аm в состояние as под действием сигнала единицы.
3.В каждом состоянии независимо от того, откуда в него произошел переход, выдается выходной сигнал, записанный в операторной вершине, отмеченной символом этого состояния.
197
© С. Г. Мосин, 2007
Лекция 7. |
|
Устройство управления: |
|
|
|||||||||||
|
|
|
|
с жесткой логикой |
|
|
|
||||||||
|
Синтез микропрограммного автомата Мура |
|
|
||||||||||||
|
|
x1x2 |
|
|
|
|
|
|
|
|
Начало |
a1 |
|||
|
a1 |
|
a8 |
y6y7 |
|
|
|
|
1 |
|
|
|
|||
|
|
|
1 |
|
|
|
|
|
x1 |
|
|
||||
|
1 |
|
|
|
1 |
|
|
|
|
a2 |
y1y2 |
0 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
x |
|
|
x |
|
|
|
|
|
x2 |
|
0 |
||||
|
|
x1x3 |
|
1x |
|
|
y3y4 |
|
|
|
|
|
|
|
|
y1y2 |
a2 |
|
2 |
|
a7 |
|
|
|
1 |
x3 |
1 |
a8 |
y6y7 |
||
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
x4 |
|
3 |
3 |
|
|
|
|
0 |
y1y3 |
|
a6 |
|
3 |
|
x |
|
x |
x |
a3 |
|
y4 |
|
|
|
|||
|
|
|
1 |
|
|
|
|
|
|
||||||
x |
|
|
|
|
1 |
1 |
|
|
|
|
|
|
|
|
|
|
|
|
x3 |
x |
x |
|
|
|
|
0 |
|
|
|
||
y4 |
a3 |
|
|
|
a6 |
y1y3 |
|
|
|
x4 |
|
|
|
||
|
|
|
|
|
|
|
0 |
|
|
||||||
|
|
x |
x |
|
|
1 |
|
x1 |
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
x |
|
1x |
3 |
|
a |
|
y y y |
|
|
|
|||
|
|
|
3 |
3 |
|
|
|
|
|
|
|||||
|
4 |
x |
x |
|
4 |
|
|
|
|
||||||
|
1 |
|
|
1 |
|
|
5 |
6 7 |
|
|
a7 |
|
|||
x |
4 |
|
|
x |
|
|
|
|
|
1 |
|
y3y4 |
|||
y5y6y7 |
a4 |
x5 |
|
|
a5 |
y8 |
|
|
|
x5 |
0 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
1 |
a5 |
y8 |
|
|
|
||
|
|
|
|
|
|
x1x3 |
|
|
|
|
|
|
|||
© С. Г. Мосин, 2007 |
|
|
|
|
|
a1 |
Конец |
|
|
|
198 |
||||
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
||||

Лекция 7. Устройство управления:
с жесткой логикой
Синтез микропрограммного автомата Мура
|
am |
K(am) |
|
as |
|
K(as) |
|
X(am, as) |
Y(am, as) |
Сигнал |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Q3 |
Q2 Q1 |
Q3 |
Q2 |
Q1 |
возбуждения |
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
a4 |
1 |
0 |
0 |
a1 |
0 |
0 |
1 |
x5 |
– |
D1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
a7 |
0 |
0 |
0 |
1 |
– |
D1 |
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
a1 |
0 |
0 |
1 |
a2 |
1 |
0 |
1 |
x1 |
y1y2 |
D3 D1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
D3 = a1x1 a1x1x2 a2x4 |
|
|
|
|||||||||||||||||||
|
a2 |
1 |
0 |
1 |
|
|
|
|
x3 |
y4 |
D3 D1 |
|
|
|
|
||||||||
|
a5 |
0 |
1 |
0 |
a2 |
1 |
0 |
1 |
x3 |
y4 |
D3 D1 |
|
a5x4 a6x4 = |
|
|
|
|
|
|
||||
|
a6 |
1 |
1 |
0 |
|
|
|
|
x3 |
y4 |
D3 D1 |
|
(a |
|
|
|
)= |
||||||
|
|
|
|
|
|
|
|
|
|||||||||||||||
|
|
|
|
|
|
= a x a x x |
|
x |
|
|
a a |
|
|||||||||||
|
a3 |
1 |
1 |
1 |
a4 |
1 |
0 |
0 |
x4 |
y5 y6 y7 |
D3 |
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
1 1 |
1 1 |
2 |
|
4 |
|
2 |
5 |
6 |
|
|
|
a2 |
1 |
0 |
1 |
|
|
|
|
x3x1 |
|
D2 |
|
= y1 x4(a2 a5 a6 ) |
|
|
|
|
||||||
|
a3 |
1 |
1 |
1 |
|
|
|
|
x4 x1 |
y8 |
D2 |
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
||||||||||||||
|
a4 |
1 |
0 |
0 |
a5 |
0 |
1 |
0 |
x5 |
D2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
a5 |
0 |
1 |
0 |
|
|
|
|
x3x1 |
|
D2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
a6 |
1 |
1 |
0 |
|
|
|
|
x3x1 |
|
D2 |
|
y1 = a1x1 a1x1x2 = a1(x1 x1x2 ) |
|
|||||||||
|
a1 |
0 |
0 |
1 |
a6 |
1 |
1 |
0 |
x1x2 |
y1y3 |
D3 D2 |
|
|
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||
|
a2 |
1 |
0 |
1 |
|
|
|
|
x3x1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
a3 |
1 |
1 |
1 |
|
|
|
|
x4 x1 |
y3 y4 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
a5 |
0 |
1 |
0 |
a7 |
0 |
0 |
0 |
x3x1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
a6 |
1 |
1 |
0 |
|
|
|
|
x3x1 |
|
|
|
|
|
|
|
|
|
|
|
199 |
|
|
|
a8 |
0 |
1© С. Г1. |
Мосин |
, 2007 |
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
a1 |
0 |
0 |
1 |
a8 |
0 |
1 |
1 |
x1x2 |
y6 y7 |
D2 D1 |
|
|
|
|
|
|
|
|
|
|
|
|
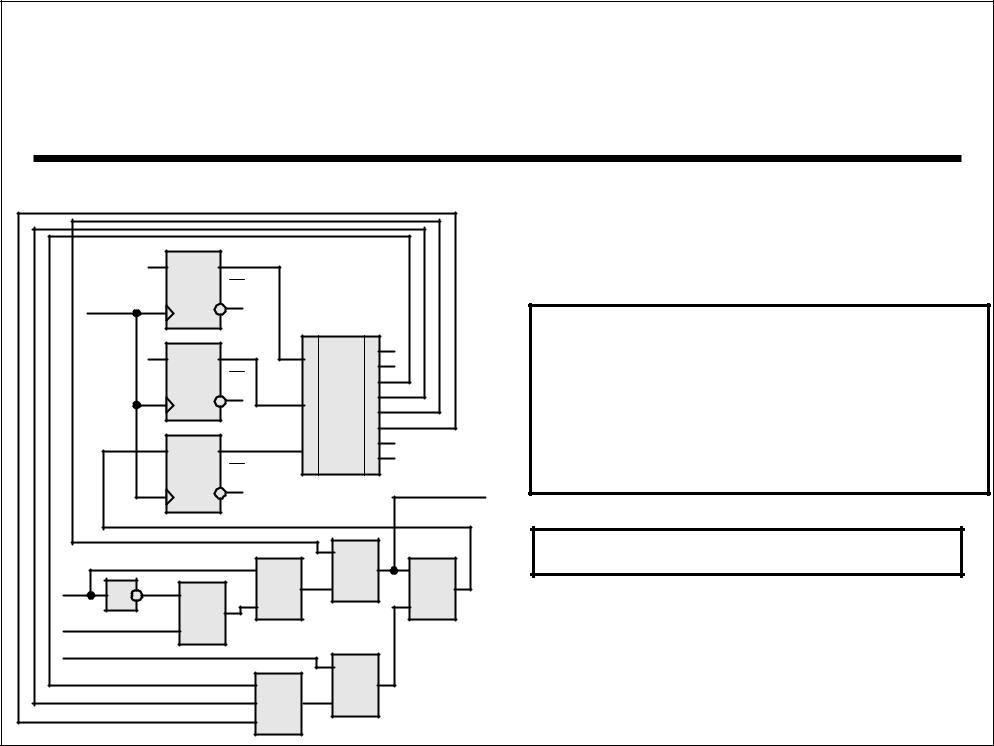
Лекция 7. Устройство управления:
с жесткой логикой
Синтез микропрограммного автомата Мура
|
|
|
D1 |
Q1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Q1 |
|
|
|
|
|
|
|
|
|
|
||
|
|
clk |
|
|
|
|
D3 = a1x1 a1x1x2 a2x4 |
|
|||||||
|
|
|
D2 |
Q2 |
1 |
DC 0 7 |
|
||||||||
|
|
|
Q |
|
|
4 |
a5x4 a6x4 = |
|
|
|
|||||
|
|
|
|
|
|
2 5 |
|
|
|
||||||
|
|
|
|
|
|
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
2 |
2 |
3 |
6 |
= a x a x x x (a a a )= |
||||||
|
|
|
|
|
|
|
1 |
||||||||
|
|
|
|
|
|
|
5 2 |
||||||||
|
|
|
|
Q3 |
|
4 |
|
1 1 |
1 1 |
2 |
4 |
2 |
5 |
6 |
|
|
|
|
D3 |
3 |
6 |
8 |
|||||||||
|
|
|
Q3 |
3 |
= y1 x4(a2 a5 a6 ) |
|
|
||||||||
|
|
|
|
|
7 |
y1 |
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
a1 |
|
|
|
|
& |
|
y1 = a1x1 a1x1x2 = a1(x1 x1x2 ) |
|||||||
|
x1 |
|
|
|
|
1 |
1 |
||||||||
|
1 |
& |
|
|
|
|
|
|
|
|
|
|
|||
|
x2 |
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
x4 |
|
|
|
|
|
& |
|
|
|
|
|
|
|
|
a6 |
a5 |
|
|
|
|
1 |
|
|
|
|
|
|
|
200 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
a2 |
|
© С. Г. Мосин, 2007 |
|
|
|
|
|
|
|
|
|
|
|
|
|