adambaev_avtomatty
.pdfАвтоматты басқару теориясы
каналы бойынша, дифференциалды те»деудi» нормаль т¾рiнäå
жазамыз, егер T = 12,5 ìèí, t з |
= 10 ìèí, k = 8,5 |
кВт |
болса. |
|
|||
|
|
т / саг |
|
e-10 p Пад ºатарына жiктеп, бiр м¾шесiн ¹ана алып, диiрменнi» берiлiс функциясын мына т¾рде аламыз:
W (p )= |
Pa (p) |
|
= |
8,5 |
|
×e-10 p = |
8,5 ×(1 - 5 p) |
|
= |
|
Q(p ) |
(12,5 p +1) |
(12,5 p +1)× (5 p + 1) |
||||||||
|
|
|
(3.98) |
|||||||
-42,5 p + 8,5
=×
62,5 p2 + 17,5 p + 1
Онда оны» дифференциалды те»деуi (62,5- ке б¼лiп):
·· |
· |
|
|
|
|
|
|
|
· |
(3.99) |
P a + 0,28 × P a + 0,016 × Pa = -0,68 ×Q+ 0,136 ×Q |
||||||||||
немесе жалпы т¾рде: |
|
|
|
|
|
|
|
|
|
|
·· |
· |
|
|
|
· |
|
|
|
|
|
x+ a2 × x+ a1 × x = b1 ×u+b2 ×u . |
(3.100) |
|||||||||
Iзделген нормаль те»деулердi» ж¾йесi былай болады: |
||||||||||
· |
|
|
|
|
|
|
|
|
ü |
|
x1 = a11 × x1 + a12 |
× x2 |
|
|
|
||||||
+ c1 ×u; ï |
(3.101) |
|||||||||
· |
|
|
|
|
|
|
|
|
ý |
|
= a |
|
× x + a |
|
× x |
|
+ c |
|
|
||
x 2 |
21 |
22 |
2 |
2 |
×uï |
|
||||
|
|
1 |
|
|
þ |
|
||||
aij аныºтау ¾шiн, сипаттамалыº аныºтауышты º½рамыз:
D = |
a11 -a |
a12 |
|
|
= (a -a )× |
(a -a )- a |
|
|
× a |
= |
(3.102) |
||||||||||||||||
|
0 |
|
|
a21 |
|
|
a22 -a |
|
|
|
|
11 |
|
|
22 |
|
|
21 |
12 |
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
= a 2 -a × (a |
22 |
+ a )- a |
22 |
× a |
|
+ a |
× a |
22 |
. |
|
|
|
|
|
|
||||||||||||
|
|
|
|
|
|
|
|
11 |
|
|
|
12 |
|
11 |
|
|
|
|
|
|
|
|
|||||
(3.102) сипаттамалыº те»деу коэффициенттерiн, (3.100) |
|||||||||||||||||||||||||||
¼рнектi» сол б¼лiгiнi» коэффициенттерiмен те»естiремiз: |
|||||||||||||||||||||||||||
|
|
a2 |
|
= -(a11 + a22 ); |
|
|
|
a1 |
= a11 × a22 - a21 × a12 . |
|
|
|
(3.103) |
||||||||||||||
Екi коэффициенттi кез келген сан ретiнде алу¹а болады, |
|||||||||||||||||||||||||||
сонда a = 0 |
, a |
21 |
= 1 |
, àë a |
22 |
= -a |
2 |
, a |
= -a . |
|
|
|
|
|
|
||||||||||||
11 |
|
|
|
|
|
|
|
|
|
|
|
|
12 |
|
|
1 |
|
|
|
|
|
|
|||||
(3.96)-дан ºосалºы аныºтауышты табамыз: |
|
|
|
|
|||||||||||||||||||||||
|
|
D |
1 |
= |
|
- c1 |
a12 |
|
|
= c |
× a |
22 |
+ c |
×a + c |
2 |
× a . |
|
(3.104) |
|||||||||
|
|
|
|
|
|
||||||||||||||||||||||
|
|
|
|
|
- c2 |
a22 -a |
|
|
|
1 |
|
|
1 |
|
|
12 |
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
(3.100)-дi» о» б¼лiгiмен (3.104) ¼рнегiн салыстырып жазамыз:

М.Д. Адамбаев, Т.С. Малдыбаева
|
c |
= b |
; |
c2 |
= |
b2 × a2 |
- b1 |
. |
(3.105) |
|
|
1 |
1 |
|
a1 |
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
(3.99)-äàí a1 , a2 , b1 , b2 коэффициенттерiнi» белгiлi |
||||||||||
ì¸íäåðií, c1 , c2 , a12 , a22 |
|
¾шiн ¼рнектерге ºояìûç: |
|
|||||||
· |
|
|
|
|
|
|
|
ü |
|
|
x1 = -0,016 × x2 - |
0,68 × u; |
|
||||||||
ï |
(3.106) |
|||||||||
· |
|
|
|
|
|
|
|
ý |
||
x 2 |
= x - 0,281× x |
2 |
+ 44,34 × uï |
|
||||||
|
1 |
|
|
|
|
|
þ |
|
||
Егер объект кiрiсiне бiрнеше u1 , u2 , …, uk айнымалылар
мен оларды» туындылары ¸сер етсе, онда ºосалºы аныºтауыш келесi т¾рде жазылады:
|
|
|
|
|
|
- (c11 ×u1 +... + c1k ×uk )× a12 |
... |
a1n |
|
|
|||||||||
|
|
|
|
|
|
|
|
||||||||||||
|
|
D1 = |
- (c21 × u1 + ... + c2 k × uk )× a22 -a ... |
a2n |
|
(3.107) |
|||||||||||||
|
|
|
|
|
|
- (cn1 ×u1 + ... + cnk ×uk )× an 2 |
... |
ann |
-a |
|
|||||||||
Êîøè |
|
ò¾ðiíå |
|
ò½ðàºòû |
òîê |
ºоз¹алтºышыны» |
|||||||||||||
дифференциалды те»деуiн ºоямыз: |
|
|
|
|
|
|
|
|
|||||||||||
æ |
2 |
|
1 |
1 |
ö |
1 |
|
æ 1 |
|
1 |
ö |
. (3.108) |
|||||||
ç |
|
|
|
|
|
|
|
÷ |
|
|
|
ç |
|
|
|
|
÷ |
||
ç p + |
|
T |
× p + T ×T |
÷ × x1 |
= T ×T |
×u1 - |
çT |
× p + |
T ×T |
÷ |
× u2 |
||||||||
è |
|
|
|
|
|
|
M |
ø |
|
M |
|
è M |
|
M ø |
|
|
|||
ì½íäà |
x1 |
= c ×w - ºоз¹алтºыш якорiнi» Э²К. Ол б½рыштыº |
|||||||||||||||||
жылдамдыººа w пропорционал; c - ºоз¹алтºышты» моментiмен тогi арасында¹ы (немесе Э²К пен б½рыштыº жылдамдыº арасында¹ы) пропорционал коэффициентi; u1 - ºоз¹алтºыш якорiндегi кернеу; u2 = I c × R Д -ºоз¹алтºыш якорiндегi кернеудi»
ò¾ñói; Ic - ºоз¹алтºыш якорiнi» тогi. Ол ºоз¹алтºыш бiлiгiндегi статикалыº ж¾ктеменi» моментiне байланысты; R Д -ºîç¹àëòºûø
якорiнi» кедергiсi; T |
= |
J × R Д |
- ºоз¹алтºышты» электромехани- |
|||||
M |
|
c 2 |
|
LД |
|
|
|
|
êàëûº óàºûò ò½ðàºòûñû; |
T = |
|
-ºîç¹àëòºûø |
ÿêîðiíi» |
||||
RД |
||||||||
|
|
|
|
|
|
|||
электромагниттiк уаºыт т½раºтысы; LД |
-ºîç¹àëòºûø |
ÿêîðiíi» |
||||||
индуктивтiлiгi; J –инерция моментi. |
|
|
||||||
44

Автоматты басқару теориясы
Т½раºты ток ºоз¹алтºышыны» кiрiс ¸серi ретiнде u1 , u2 айнымалылары, ал шы¹ыс координат ретiнде – б½рыштыº жылдамдыº w (немесе x1 ) àëûí¹àí.
Берiлген мысал ¾шiн:
|
|
|
|
|
|
· |
|
|
|
|
|
|
|
|
|
|
|
|
ü |
|
|
|
|
|
|
|
x1 = a11 |
× x1 + a12 × x2 + c11 ×u1 + c12 ×u2 ; |
|
||||||||||||
|
|
|
|
|
|
ï |
(3.109) |
|||||||||||||
|
|
|
|
|
|
· |
|
|
|
|
|
|
|
|
|
|
|
|
ý |
|
|
|
|
|
|
|
= a |
|
× x + a |
× x + c |
|
×u + c |
|
×u |
|
|
|||||
|
|
|
|
|
|
x2 |
21 |
21 |
22 |
2 |
ï |
|
||||||||
|
|
|
|
|
|
|
|
1 |
22 |
2 |
1 |
|
þ |
|
||||||
ж¾йенi» бас ж¸не ºосалºы аныºтауыштары: |
|
|
|
|||||||||||||||||
|
D = |
|
a11 -a |
a12 |
|
= a 2 |
- |
(a11 + a22 )×a + a11 × a22 |
|
- a12 × a21 (3.110) |
||||||||||
|
|
|
|
|||||||||||||||||
|
|
|
|
|
|
a21 |
a21 -a |
|
|
|
|
|
|
|
|
|
|
|
||
D1 |
= |
|
- c11 ×u1 - c12 ×u2 |
|
a12 |
|
= |
|
|
|
|
|
|
|
(3.111) |
|||||
|
|
|
|
|
|
|
|
|
|
|||||||||||
|
- c21 |
×u1 - c22 ×u2 |
a22 -a |
|
|
|
|
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
= (- c11 × a22 + c21 × a12 )×u1 + (- b12 × a22 + c22 × a12 )×u2 + (c11 ×u1 + c21 ×u2 )×a
(3.110)-ын коэффициенттерiн, (3.108) те»деудi» сол б¼лiгiнi» коэффициенттерiне те»естiрiп табамыз:
a |
× a |
|
- a |
× a |
|
= |
1 |
; - (a |
+ a |
|
) = |
1 |
. (3.112) |
22 |
21 |
|
22 |
|
|||||||||
11 |
|
12 |
|
|
T ×TM |
11 |
|
|
T |
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
М½нда екi коэффициент кез келген м¸н ретiнде алынады,
сонымен a11 = 0 , a21 = 1, îíäà: |
|
||||||
a22 = - |
1 |
; |
a21 |
= |
1 |
. |
(3.113) |
|
|
||||||
|
T |
|
|
T ×TM |
æ¸íå p |
||
Åíäi (3.111)-äåãi áið |
|
д¸режелi a |
|||||
коэффициенттерi мен (3.108) ¼рнектi» о» жа¹ында¹ы коэффициенттердi, (3.113)-тi ескере отырып, те»естiремiç:
c = 0 |
; |
|
c |
= - |
1 |
; |
c |
|
= |
1 |
; c |
22 |
= 0 . |
||||
|
|
|
|||||||||||||||
|
|
|
|
|
|
||||||||||||
11 |
|
|
|
|
|
|
|
21 |
|
|
|
|
|
||||
|
|
12 |
|
|
TM |
|
|
|
|
|
T ×TM |
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
Сонымен: |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
· |
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|
ü |
|
|
x1 = x2 |
- |
|
×u1 ; |
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
ï |
|
||||
|
TM |
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
ï |
(3.114) |
|
· |
|
1 |
|
|
1 |
|
|
|
1 |
|
|
ý |
|||||
|
|
|
|
|
|
|
|
ï |
|
||||||||
x 2 = - |
|
× x - |
× x |
|
+ |
|
×u |
|
|||||||||
|
|
|
2 |
|
|
|
|
||||||||||
|
T ×TM |
1 |
|
T |
|
|
T ×TM |
1 ï |
|
||||||||
|
|
|
|
|
|
|
|
|
þ |
|
|||||||


Автоматты басқару теориясы
Объектiнi» ж½мыс режимi y(t) ºобалжу ыºпал түðiíå
байланысты. Б½л ыºпалдар: ñûðòºû æ¸íå параметрлiк ыºпалдар¹а
á¼ëiíåäi.
Кен-байыту к¸сiпорындарында сыртºы ыºпалдар, ¸детте шикiзатты» физика-механикалыº ж¸не химия-минералогиялыº ºасиеттерiнi» ¼згеруiне, сусымалы материалды» шы¹ынына, реагенттердi» ºасиеттерiне, т.б байланысты. Параметрлiк ыºпалдар – технологиялыº процестi» параметрлерiне т¸уелдi болады. Мысалы, барабанды диiрменнi» шарлары мен шегенiнi» ескiруiмен, аппараттарды» кiрленуiмен, реагенттер ºасиеттерiнi» т¼мендеуiмен, т.б. аныºталады.
Егер екi сыртºы ыºпалдар арасында¹ы уаºыт tu интервалы ж¸не объектiдегi ауыспалы процесс уаºыты Tp , tu ññTp
ºатысымен байланысты болса, онда ºарастырылып отыр¹ан технологиялыº процесс, статикалыº режимде ж½мыс iстейдi деуге
болады. Б½л жа¹дайда объектiнi» Dt операторын ж¸не басºару
Dt-1 операторын статикалыº операторлар класынан iздейдi. Егерде tu ìåí Tp ¼лшемдес болса, онда басºарылатын
объектiнi» негiзгi ж½мыс режимi - динамикалыº режим болады. Б½л жа¹дайда, объектiнi» Dt операторы динамикалыº жағынан сипатталады (мысалы, берiлiс функциямен) да, басºару блогыны» Dt-1 операторын динамикалыº операторлар класынан iздейдi.
Параметрлiк ыºпалдар ж¸й ¼згерген кезде (мысалы, барабанды диiрменнi» шарлары мен шегенiнi» ескiруi), осы ыºпалдар¹а ºатысты технологиялыº процесс – квазистатикалыº болады. Сонымен, объектiнi» ж½мыс режимi – басºару каналы бойынша объектiнi» динамикалыº ºасиеттерiн зерттеу негiзiнде, əрі
ºобалжу u(t) ыºпалын статикалыº анализдеу арºылы аныºталуы м¾мкiн.
tu áTp кезiндегi со»¹ы жа¹дайды ºарастырамыз. Б½л - ºобалжу интенсивтi екенiн бiлдiредi (ºобалжулар объектiге, басºару u(t) ¸серiнi» ¼згеруi арºылы игерiп алуынан, жиi берiледi). Сондыºтан, шы¹ыс айнымалыны» ºажеттi басºару


Автоматты басқару теориясы
ºобалжулар тез ¼згередi, ал кешiгу tз уаºыты басºару каналы
бойынша ¾лкен болады, я¹ни, tз ñtсп сонымен басºарушы
¸сердi» ¼згеруiмен ºобалжуларды компенсациялау¹а м¾мкiндiк жоº ж¸не объектiнi басºару¹а болмайды.
4.1ə-суретте ¾лкен т¾су уаºыты tсп бар автокорреляциялыº функция берiлген. Б½л объектiге ¸сер ететiн ºобалжуды» жиiлiгi т¼мен (аз) екендiгiн бiлдiредi. Егер t з át сп болса, онда объектiнi»
шы¹ысында¹ы ºобалжуды реттеушi ¸сердi» ¼згеруi арºылы компенсациялау¹а м¾мкiндiк туады.
Кен-байыту аппараттарыны» наºты типтерi ¾шiн ºобалжу ¸серлер т¾рi бiршама т½раºты болатынäûºòàí, åãåð
tсп шамасы белгiлi болып, объектiдегi таза кешiгу tз белгiлi болса, онда t з át сп шартты – АБЖ-iн º½ру м¾мкiндiк екенiн
бiлдiретiн шарт. М½ндай АБЖ керi байланыс принципiне негiзделген. Бiраº ол шарт осындай ж¾йенi» сапалы ж½мыс iстеуiне кепiлдік бермейдi.
Æàáûº æ¾éåäå, t з át сп шарты орындал¹ан кезде,
технологиялыº процестi басºару сапасы туралы алдын ала ба¹аны, квадраттыº орта м¸ннi» ауытºу шамасы бойынша беруге болады:
s y = 2 ×[Rxx (0)- Rxx (t з )], |
(4.1) |
ì½íäà Rxx (t з ) - t = t з áîë¹àíäà, áàñºàðó æ¾éåñií |
àøºàíдағы |
алын¹ан шы¹ыс шаманы» автокорреляциялыº функциясыны» м¸нi; Rxx (0) -t = 0 бол¹анда, басºару ж¾йесiн ашºан кезде
алын¹ан, шы¹ыс шаманы» автокорреляциялыº функциясыны» м¸нi.
Rxx (0) ìåí Rxx (t з ) арасында¹ы айырым ¾лкен бол¹ан
сайын, (4.1) ¼рнек бойынша есептелген ºатенi» орта м¸нi де ¾лкен болады.
Егер объектiнi» екпiн ºисы¹ы S- ò¾ðãå èå áîëып кешiгуi жоº жо¹ары реттi дифференциалды те»деумен ¼рнектелсе, онда (4.1) ¼рнегi негiзделетiн ал¹ышарттар б½зылады. Дегенмен, б½л жа¹дайда объектiнi» реттеу ºасиеттерi, кешiгуi бар объектiмен салыстыр¹анда, жаºсы болады.
Автоматты басқару теориясы
Процестi сипаттайтын ºарапайым ж¸не к¾рделi шектеулерге
èå áîëó ºàæåò. X æà¹äàé áà¹ûòы м¸нiнi» ауданы Õ1,…..,Õm компоненттерiне шектеу түðiíäå áåðiëåäi:
Õ1 min £ X1 £ X1 max
………. |
(4.3) |
Xm min £ Xm £ Xm max
Ñîë ñèÿºòû, U ,Y векторларыны» м¾мкiн жа¹дайыны»
ауданын жазу¹а болады. Кейбiр жа¹дайларда тиiмдеу критерийi ретiнде, объектiнi» кез келген шы¹ыс айнымалысы бола алады. Онда (4.2) маºсатты функциясы ретiнде (3.1)-(3.4) т¾рiндегi объектiнi» статикалыº сипаттамасы болады. Объект
ж½мысыны» оптимальды режимі äåï U * , X * ба¹ыттарыны» мына жа¹дайын түсiнемiз, я¹ни берiлген шектеу жа¹дайында маºсатты функцияны» экстремумiне ºол жеткiзу.
Статикалыº т¸ртiбiн басºару, адам-машина ж¾йесі негiзiнде ж¾ргiзiледi. Объект те»деуiн ЭЕМ-да есептейдi, ал объектiдегi
оптимальды ыºпалды ºолмен º½рады. Объектiнi» ж½мыс процесiнде статикалыº сипаттамаларды» коэффициенттерi жа»артылып, оптимальды ыºпалды аныºтау процесi ºайталанады.
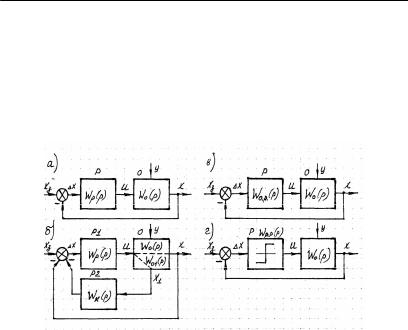
2. Ауытºу бойынша басºару ж¾йесi:
а) технологиялыº объектiлердi» шы¹ыс айнымаларыны»
автоматты т½раºтандыру ж¾йесi, òàó-êåí ¼íåðê¸ñiáiíäå êå» òàðà¹àí (4.2à-сурет). Басºару Î объектiсiне U (t) áàñºàðó
ûқïàëы ¸сер етедi, ол ¼з кезегiнде x(t ) шы¹ысыны» объект берiлген õç ì¸íiíåí Dx àóûòºóû.
Еãåð áåðãiøòi» æîºòû¹ûíàí Y (t) ¸рекетiндегi ºобалжу
¼лшенбесе, м½ндай ж¾йелердi мына жа¹дайда ºолданған дұрыс. М½ндай ж¾йелер келесi шарт орындал¹анда ºолданады. Я¹íè,
tи æ¸íå Òè ¼лшемдес болса, онда объект ж½мысыны» негiзгi т¸ртiбi, динамикалыº т¸ртiп болып табылады. Объект W0 (p)
берiлiс функциясымен суреттеледi. Сонымен ºатар, реттегiште W p (p) берiлiс функциясы ретiнде ½сынылады (реттеу за»ы).
Тау-кен к¸сiпорындарында стандартты реттегiштер ке» тарал¹ан. Оларды» мынадай реттеу за»дары бар: пропорционалды
(П), пропорционалды-интегралды (ПИ), пропорционалды-