

9716
.pdf[Введите текст] |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
M 2 |
|
|
|
L2 |
L1 |
|
|
|
|
|
|
|
|
|
|
|
M 0 |
|
|
|
|
|
|
|
|
S2 |
|
M 1 |
|
|
|
|
S1 |
|
|
|
|
|
|
|
|
|||
|
|
|
|
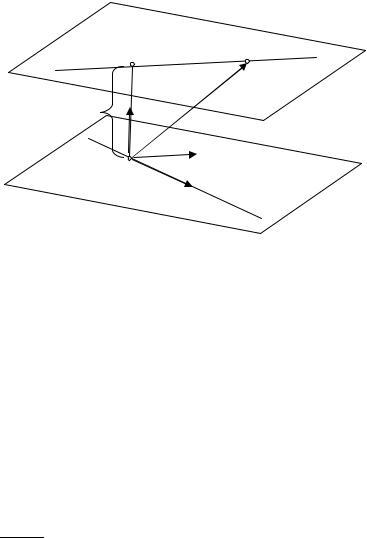
Рис. 12.6 |
|
|
|
|
|
Ясно, что прямые будут принадлежать одной плоскости, а значит пе- |
|||||||||
ресекаться в точке M 0 , тогда и только тогда, |
когда три вектора S1 , S2 и |
||||||||
M1M2 ={x2 − x1, y2 − y1, z2 − z1} |
компланарны. |
В координатной форме это |
|||||||
условие выглядит так |
− x |
|
− y z |
− z |
|
|
|||
|
x |
y |
|
|
|||||
|
|
||||||||
|
2m 1 |
|
2 n |
1 |
2 p |
1 |
|
= 0 . |
|
|
|
1 |
|
1 |
|
1 |
|
|
|
|
m2 |
|
n2 |
|
p2 |
|
|
|
|
Как найти координаты точки пересечения прямых? Проведём через каждую прямую плоскость, проецирующую эту прямую на какую-нибудь из координатных плоскостей. Например, рассмотрим плоскости, проецирующие эти прямые на плоскость xOy . Пересечение этих плоскостей – это прямая, перпендикулярная плоскости xOy . Координаты точки пересечения этой прямой с плоскостью xOy совпадают с соответствующими координатами точки пересечения данных прямых (см. рис. 12.7).
z |
L2 |
L1
M 0
y
x |
( x0 |
, y0 ) |
|
Рис.12.7
Нахождение координат точки (x0 , y0 ) сводится к решению системы
90

[Введите текст]
x − x |
= |
|
y − y |
|
|
|||||
|
1 |
|
|
1 |
|
|
||||
|
m1 |
|
|
n1 |
|
|
||||
|
|
|
|
|
|
|
|
|||
|
|
x − x |
|
|
|
|
y − y |
, |
||
|
|
2 |
|
= |
|
|
2 |
|
||
|
|
|
|
|
|
|
|
|||
|
|
m |
|
|
|
|
n |
|
|
|
|
2 |
|
|
|
|
2 |
|
|
||
а третья координата может быть найдена из уравнения прямой L1 или L2 . Пример. Доказать, что прямые
L : |
x + 5 |
= |
y − 4 |
= |
z + 5 |
, L : |
x + 5 |
= |
y −16 |
= |
z + 6 |
|
−6 |
|
|
−12 |
|
||||||
1 |
3 |
|
2 |
2 |
4 |
|
3 |
||||
|
|
|
|
||||||||
пересекаются и найти координаты точки их пересечения M 0 (x0 , y0 , z0 ) Про-
веряем компланарность тройки векторов S1 = {3, −6, 2}, S2 = {4, −12,3} и
M1M2 = {0,12,−1}, вычисляя определитель:
0 |
12 |
−1 |
|
−6 |
2 |
|
3 |
−6 |
|
|
|
|
|||||||
|
|
|
|||||||
3 |
−6 2 |
= −12 |
− |
= 0 . |
|||||
4 |
−12 |
3 |
|
−12 |
3 |
|
4 |
−12 |
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
Следовательно, эти прямые пересекаются. Координаты точки пересечения находим, решая, например, систему
x + 5 |
= |
|
y − 4 |
|
|||||
|
|
|
|
|
|
|
|
|
|
3 |
|
|
|
−6 |
. |
||||
|
|
x + 5 |
|
|
|
y −16 |
|||
|
|
= |
|
|
|||||
|
4 |
|
|
−12 |
|
||||
|
|
|
|
|
|
||||
Её решение x0 = 7, y0 = −20 . Из уравнения, допустим, первой прямой найдем третью координатуz0 = 3 . Итак, точка пересечения этих прямых
M 0 (7, −20,3).
12.4. Расстояние между двумя прямыми. Случай параллельных прямых мы рассматривали в п.12.2. Поэтому пусть прямые скрещивающиеся, следовательно, расположены в параллельных плоскостях (см. рис. 12.8), расстояние между которыми и будет искомым расстоянием между прямыми.
91
[Введите текст]
Рис.12.8
Пусть прямые заданы каноническими уравнениями
|
|
L : |
x − x1 |
= |
y − y1 |
= |
z − z1 |
, |
L : |
x − x2 |
= |
y − y2 |
= |
z − z2 |
|
||||||||||||||||||
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||
|
|
|
1 |
|
|
|
m1 |
|
|
|
n1 |
|
p1 |
|
|
2 |
|
|
m2 |
|
|
n2 |
|
|
|
|
|
p2 |
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
4 5 6 5 |
|
|
|
|
|
|
|
|
|
|
||||||||
Кратчайшее расстояние между прямыми найдём как абсолютную величину |
|||||||||||||||||||||||||||||||||
проекции вектора |
|
|
|
|
|
на вектор |
|
|
|
|
|
. |
|
|
|
|
|
|
|
|
|
||||||||||||
|
Пример. Найти расстояние между прямыми |
|
|
2 |
|
|
|||||||||||||||||||||||||||
|
|
|
|
|
|
8 1 |
|
1 |
|
|
|
|
|
|
8 1 |
|
|
|
|
||||||||||||||
|
|
1 : |
|
|
1 |
|
1 |
|
2 |
|
; 1 : |
1 |
|
3 |
|
|
|
|
4 |
|
|
; |
|
||||||||||
|
|
|
|
|
|
|
>1, 1,1? |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
|
Вектор |
|
|
|
|
|
|
|
|
|
|
. |
Находим векторное произведение |
||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
A |
|
|
B |
|
|
|
|
|
|
|
|
|
|
|
|
. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
C |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
@1 |
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
4 5 |
|
6 5 |
|
2@ 2A 2B 8 2C |
|
|
|
|
|||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
1 |
|
3 |
4 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
тору |
4 |
. Тогда |
|
|
|
|
|
|
|
|
|
|
|
|
2 >1, 1, 1? |
, коллинеарный век- |
|||||||||||||||||
Удобнее находить проекцию на вектор |
|
|
|
|
|
|
|
||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|1 1 8 1| |
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
2 · |
|
I 0.58. |
|||||||||||||||||||
|
|
|
- ПрE |
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
√3 |
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
92
[Введите текст]
Лекция 13. Взаимное расположение прямых и плоскостей
13.1. Угол между прямыми в пространстве. Пусть заданы две пря-
мые L1 и L2 своими каноническими уравнениями
|
|
|
|
|
|
L : |
|
x − x1 |
|
= |
y − y1 |
|
= |
z − z1 |
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
|
|
|
|
|
|
1 |
|
m1 |
|
|
n1 |
|
|
|
p1 |
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
L : |
x - x2 |
= |
y - y2 |
|
= |
z - z2 |
. |
|||||||
|
|
|
|
|
|
|
|
|
|
|||||||||||
|
|
|
|
|
|
2 |
|
m2 |
|
|
n2 |
|
|
|
p2 |
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
Если |
m1 |
= |
n1 |
= |
p1 |
, что означает коллинеарность направляющих векторов |
||||||||||||||
m2 |
n2 |
p2 |
||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
S1 ={m1, n1, p1} |
и S2 ={m2 , n2 , p2}, то прямые L1 и L2 параллельны и угол |
|||||||||||||||||||
между ними полагают равным нулю. Параллельные прямые, очевидно, принадлежат одной плоскости.
Под углом между пересекающимися прямыми будем понимать угол
ϕ между их направляющими векторами |
S1 ={m1, n1, p1} |
и S2 ={m2 , n2 , p2}, |
|||||||||||||||||
если он острый, и угол α = π − ϕ в противном случае. Следовательно, |
|||||||||||||||||||
cos a =| cos j |= |
|< S1, S2 >| |
= |
|
| m1 × m2 + n1 × n2 + p1 × p2 |
| |
|
. |
(13.1) |
|||||||||||
|
UUR |
|
× |
UUR |
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
|
S |
|
S |
2 |
|
|
|
m 2 |
+ n 2 + p 2 × m 2 |
+ n 2 |
+ p 2 |
|
||||||
|
|
1 |
|
|
|
|
|
|
1 |
1 |
1 |
|
2 |
2 |
2 |
|
|
|
|
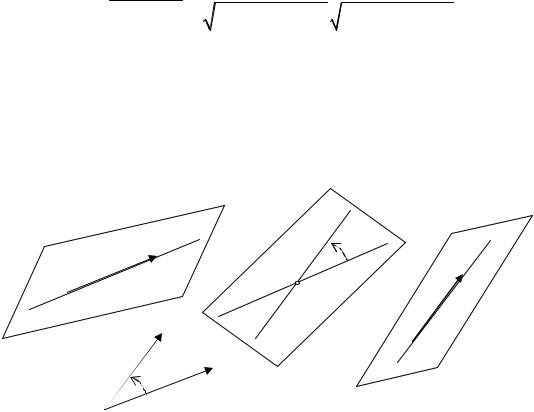
Прямые, не лежащие в одной плоскости, называются скрещиваю- |
|||||||||||||||||||
щимися прямыми. Определим понятие угла |
между скрещивающимися |
||||||||||||||||||
прямыми. Под углом |
α между двумя прямыми |
L1 и L2 будем понимать |
|||||||||||||||||
наименьший из углов |
|
между пересекающимися |
прямыми L ′ и |
L ′ , им |
|||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1 |
2 |
||
параллельными (см. рис.13.1).
|
L ′ |
α |
|
2 |
|
S1 |
L1 |
L2 |
L ′ |
||
|
|
1 |
S2
S2
ϕ
S1
Рис. 13.1
93
[Введите текст] |
|
|
|
|
|
|
|
|
|
В частности, условие перпендикулярности двух прямых |
имеет |
||||||||
вид |
|
L1 L2 m1m2 + n1n2 + p1 p2 = 0 . |
|
||||||
|
|
|
|||||||
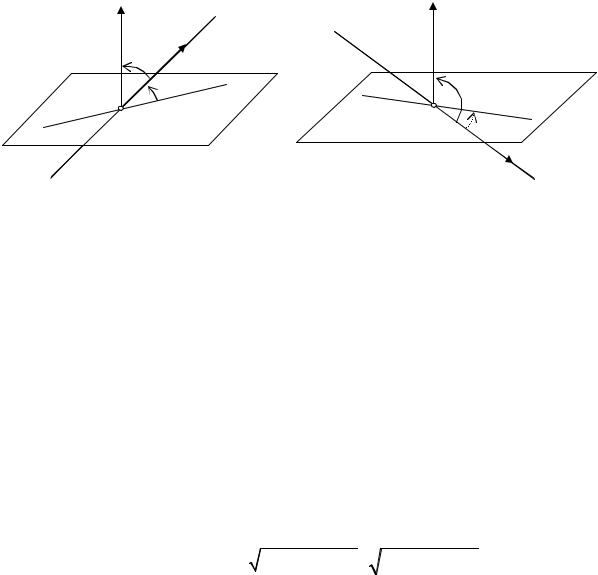
13.2. Угол между прямой и плоскостью. Найдем теперь угол между |
|||||||||
прямой |
|
x − x0 |
|
|
y − y0 |
|
z − z0 |
|
|
|
L : |
|
= |
= |
|
(13.2) |
|||
|
m |
|
p |
||||||
|
|
|
n |
|
|||||
и плоскостью П : Ax + By + Cz + D = 0 . |
Напомним, что под углом между |
||||||||
прямой и плоскостью понимают наименьший положительный угол |
α |
||||||||
между проекцией |
′ |
|
L на плоскость П и прямой L (см. рис. |
||||||
L прямой |
|
||||||||
13.2). |
|
|
|
|
|
|
|
|
|
N L L N
ϕS
α |
′ |
|
|
|
|
|
ϕ |
L′ |
||||
|
|
|
|
|
|
|
|
|
||||
|
L |
|
|
|
|
|
|
|
α |
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
S |
|
|
|
|
Рис. 13.2 |
|
|
|
|
|
|
|
||
Вычисление угла |
α можно свести к вычислению угла |
ϕ между |
||||||||||
направляющим вектором S = {m,n, p} |
прямой |
L и нормальным к |
||||||||||
плоскости П вектором N = {A, B,C}. |
В случае острого угла |
0 < ϕ < π / 2 |
||||||||||
имеем |
|
|
|
|
|
|
|
|
|
|
|
|
|
sinα = cosϕ = |
< N , S > |
|
|
|
|
||||||
|
UUR |
|
UR . |
|
|
|
|
|||||
|
|
|
|
|
| N | ×| S | |
|
|
|
|
|||
В случае тупого угла |
π / 2 < ϕ < π , |
так как |
|
j = π + a (см. рис. 13.2), по- |
||||||||
лучим sin a = sin(j - π) = -cos j . |
|
|
2 |
|
|
|
|
|||||
Таким образом, |
для вычисления угла |
|||||||||||
|
2 |
|
|
|
|
|
|
|
|
|
|
|
между прямой и плоскостью получаем формулу |
|
|
|
|
||||||||
sin a =| cos j |= |
|
|
| mA + nB + pC | |
|
|
. |
|
|||||
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
A2 |
+ B2 + C 2 |
|
× m2 + n2 + p2 |
|
|||||
|
|
|
|
94 |
|
|
|
|
|
|
|
|

[Введите текст]
В частности, условие перпендикулярности и условие параллельности прямой и плоскости имеют вид
L П |
|
A |
= |
B |
= |
C |
; |
m |
|
|
|||||
|
|
|
n p |
||||
L || П |
Am + Bn + Cp = 0 . |
||||||
В последнем случае, если дополнительно выполняется равенство
Ax0 + By0 + Cz0 + D = 0 ,
которое означает, что точка (x0 , y0 , z0 ) прямой L принадлежит плоскости П , то прямая лежит в этой плоскости. Таким образом, принадлежность прямой, заданной каноническими уравнениями (13.2), плоскости П : Ax + By + Cz + D = 0 определяется выполнением условий
{Am + Bn + Cp = 0
Ax0 + By0 + Cz0 + D = 0 .
Если прямая L задана как линия пересечения двух плоскостей
A1 x + B1 y + C1 z + D1 = 0
A2 x + B2 y + C2 z + D2 = 0 ,
то ее направляющий вектор может быть получен как векторное произведение нормальных векторов этих плоскостей (см. рис. 12.3), т.е.
S= N1 ´ N2 ,
изадача нахождения угла между прямой и плоскостью сводится к преды-
дущей. В этом случае
sin j = |
< N ´ N |
, N > |
= |
(N , N |
, N ) |
|||||||||
R |
1 R 2 |
R |
R |
1 R 2 |
|
R |
. |
|
||||||
|
| N1 |
´ N2 | ×| N | |
|
| N1 ´ N2 | ×| N | |
||||||||||
13.3. Пересечение прямой с плоскостью. Вычислим теперь коорди- |
||||||||||||||
наты точки пересечения прямой |
L : |
x − x0 |
|
= |
y − y0 |
= |
z − z0 |
и плоскости |
||||||
|
|
|
||||||||||||
|
|
|
|
|
m |
|
n |
|
|
|
p |
|||
П : Ax + By + Cz + D = 0 |
при условии, что они пересекаются. Перейдём от |
|||||||||||||
канонических уравнений прямой к параметрическим
95
[Введите текст] |
|
|
|
|
|
|
|
|
|
|
|
x− x |
|
y− y |
|
z − z |
|
|
|
x = mt + x |
|
|
= |
= |
0 |
=t |
|
|
0 |
|||
|
0 |
0 |
|
|
y =nt + y0 |
|||||
|
m |
n |
p |
|
||||||
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
z = pt + z0 |
|
Найдем значение параметра t1 , при котором соответствующая точка прямой принадлежит плоскости, т.е. удовлетворяет уравнению
A(mt + x0 ) + B (nt + y0 ) + C ( pt + z0 ) + D = 0
или, что тоже,
( Am + Bn + Cp)t = -( Ax0 + By0 + Cz0 + D) . |
(13.2) |
Если Am + Bn + Cp = 0 и Ax0 + By0 + Cz0 + D ¹ 0 , то это уравнение не имеет решений. Эти условия соответствуют тому, как мы выяснили выше, что прямая и плоскость параллельны и, следовательно, не пересекаются. Если Am + Bn + Cp = 0 и Ax0 + By0 + Cz0 + D = 0 , то уравнение (13.2) имеет бесчисленное множество решений, т.е. прямая принадлежит плоскости. И, наконец, если Am + Bn + Cp ¹ 0 , то
t1 |
= − |
Ax0 |
+ By0 |
+ Cz0 |
+ D |
|
|
|
|
|
. |
||
|
|
|
|
|||
|
|
Am + Bn + Cp |
||||
Подставим это значение в параметрические уравнения прямой и найдем x1, y1, z1 – координаты точки пересечения прямой L с плоскостью П .
Если прямая L задана как линия пересечения двух плоскостей
A1 x + B1 y + C1 z + D1 = 0
A2 x + B2 y + C2 z + D2 = 0 ,
а плоскость задана уравнением Ax + By + Cz + D = 0 , то координаты точки их пересечения находим, решая следующую систему трех линейных уравнений:
Ax + By + Cz + D = 0 |
|||
|
|
|
|
A1x + B1 y + C1z + D1 = 0 . |
|||
A x + B y + C |
2 |
z + D = 0 |
|
2 |
2 |
2 |
|
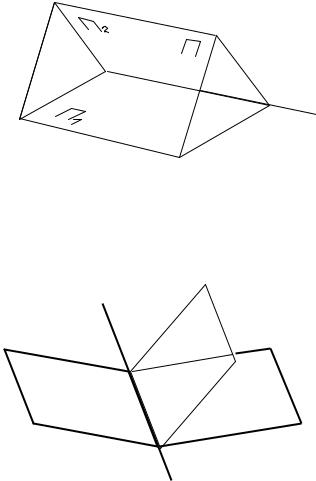
Здесь возможны варианты. Если определитель матрицы этой системы не равен нулю, то искомая точка пересечения единственна и находится, например, по правилу Крамера. Если определитель матрицы этой системы
96
[Введите текст]
равен нулю, что означает компланарность нормальных векторов к этим плоскостям, то система может быть несовместна (см., например, рис. 13.3)
Рис. 13.3
или иметь бесчисленное множество решений, когда эти три плоскости пересекаются по одной прямой (см. рис. 13.4).
Рис. 13.4
97

[Введите текст]
Лекция 14. Другие задачи о прямых и плоскостях
Рассмотрим несколько типичных задач получения уравнений прямых или плоскостей, обладающих заданными свойствами.
Задача 1. Составить уравнения прямой L , |
проходящей через данную |
||
точку M ( x0 , y0 , z0 ) |
перпендикулярно |
к |
данной плоскости |
П : Ax + By + Cz + D = 0 . |
|
|
|
2 >, , ?
0 0 0 0
L 
Рис. 14.1
Очевидно, что в качестве направляющего вектора прямой можно взять нормальный вектор к плоскости, т.е. S = N = {A, B,C}. Отсюда следует, что уравнения искомой прямой имеют вид
x − x0 |
= |
y − y0 |
= |
z − z0 |
. |
(14.1) |
A |
B |
|
||||
|
|
C |
|
|||
Задача 2. Составить уравнение плоскости П , проходящей через данную точку M 1 ( x1 , y1 , z1 ) перпендикулярно к данной прямой L
|
x − x0 |
= |
y − y0 |
= |
z − z0 |
. |
|
|
m |
n |
|
|
|||
|
|
|
p |
|
|||
Очевидно (см. рис. 14.2), что в качестве нормального вектора плоско- |
|||||||
|
|
|
|
|
|
R |
= { m,n, p } . От- |
сти можно взять направляющий вектор прямой, т.е. N = s |
|||||||
сюда следует, что уравнения искомой плоскости имеет вид |
|
||||||
m ( x − x1 ) + n ( y − y1 ) + p ( z − z1 ) = 0 . |
(14.2) |
||||||
98

[Введите текст]
M 0 (x0 , y0 , z0 )
M 1 ( x1 , y1 , z1 )
R |
= { m, n, p } |
s |
Рис. 14.2
Задача 3. Найти проекцию точки M 0 (x0 , y0 , z0 ) на плоскость
П : Ax + By + Cz + D = 0 .
Напомним, что проекцией точки M0 на плоскость называют основание перпендикуляра M1 , опущенного из этой точки на плоскость (см. рис.14.3). Очевидно, что эта проекция будет точкой пересечения плоскости П и прямой (14.1), проходящей через точку M0 перпендикулярно к этой плоскости.
N = { A, B,C }
M 0 (x0 , y0 , z0 )
M 1 ( x1 , y1 , z1 )
|
|
|
Рис. 14.3 |
|
|
|
|
Задача 4. Найти проекцию точки |
M 1 ( x1 , y1 , z1 ) на прямую L |
|
|||||
|
x − x0 |
= |
y − y0 |
= |
z − z0 |
. |
|
|
|
|
|
|
|||
|
m |
n |
p |
|
|||
Проекцией точки M1 на прямую L в пространстве служит точка M2 |
пере- |
||||||
сечения прямой L и плоскости, проходящей через данную точку M1 |
пер- |
||||||
пендикулярно прямой L (см. рис. 14.4). |
|
|
|
||||
|
|
|
99 |
|
|
|
|