

9698
.pdfобозначим (xў; yў). Поскольку имеет место векторное равенство
OM = OOў+ OўM (рис. 26.2), то можно записать в координатах
м |
x |
ў |
x |
|
пx = |
+ |
|
||
п |
|
|
0 |
(26.3) |
н |
y |
ў |
y0 |
|
п |
|
|||
опy = |
+ |
|
Формулы |
(26.3) |
позволяют находить |
исходные |
координаты x; y |
) |
по |
||||
|
|
|
|
|
|
|
|
( |
|
|
известным |
xў; yў |
при параллельном |
переносе. |
«Новые» координаты |
||||||
|
( |
) |
|
|
|
|
|
|
|
|
выражаются через исходные следующим образом: |
|
|
|
|||||||
|
|
|
м |
ў |
x - |
x |
|
|
|
|
|
|
|
пx |
= |
|
|
|
|
||
|
|
|
п |
|
|
0 |
, |
(26.4) |
||
|
|
|
н |
ў |
y - |
y0 |
||||
|
|
|
п |
|
|
|
|
|||
|
|
|
опy |
= |
|
|
|
|
||
Пусть, например, исходное уравнение имеет вид
x2 + 2x + 4 y2 - 16 y = 8 |
или |
x + 1 2 |
+ 4 y - |
2 |
2 |
= 25 . |
|
|
|
( |
) |
( |
|
) |
|
После выполнения параллельного переноса, задаваемого формулами
|
м |
|
ў |
x + 1 |
|||||
|
пx |
|
= |
||||||
|
п |
|
|
|
|
|
|
, |
|
|
н |
|
ў |
|
|
||||
|
п |
|
y - 2 |
||||||
|
опy |
|
= |
||||||
оно приобретёт вид |
|
|
|
|
|
|
|
||
|
′2 |
|
|
|
|
y |
′2 |
|
|
|
x |
+ |
|
|
|
= 1. |
|||
25 |
25 / 4 |
||||||||
|
|
|
|||||||
Видим, что в новых координатах получилось каноническое уравнение эллипса с полуосями a = 5 и b = 5 / 2 с центром в начале координат Oў.
Рис. 26.3
180
Из формул (26.4) ясно, что точка Oў в исходной системе имеет
координаты |
( |
) |
. |
На |
рисунке 26.3 отражено |
построение, |
- 1;2 |
|
|||||
соответствующее такому преобразованию. |
|
|||||
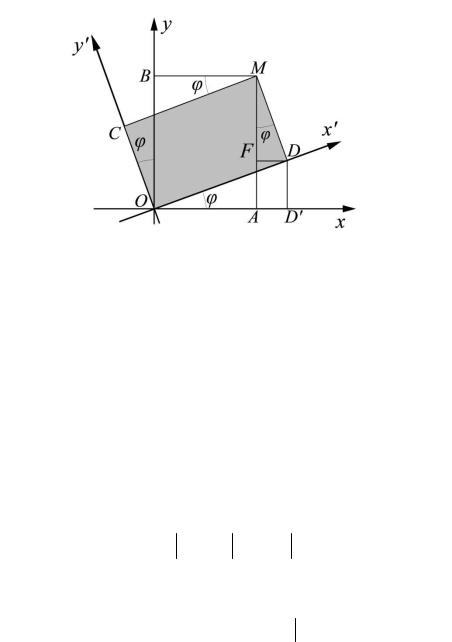
26.5. Преобразование поворота системы координат. Повернём |
||||||
исходную систему координат |
xO y вокруг начала координат |
на угол j |
||||
(положительным считается поворот против часовой стрелки) в положение
O xўyў (рис. 26.4).
|
|
|
Рис. 26.4 |
|
|
|
Пусть |
точка |
|
M имеет в исходной системе координаты |
x; y |
) |
и |
|
|
|
|
( |
|
|
координаты |
xў; yў |
в «новой» системе координат O xўyў. Чтобы установить |
||||
|
( |
) |
|
|
|
|
связь между исходными и новыми координатами точки M , выполним дополнительные построения. Через A и B обозначим проекции точки M
на координатные оси O x и O y , а через D и C — |
проекции её на оси O xў |
|||||||||||||||||||||||||||||||
и O yў (рис. 26.4). Из точки D опустим перпендикуляры на отрезок |
AM |
|||||||||||||||||||||||||||||||
(основание перпендикуляра |
|
— |
|
|
точка |
|
|
F ) и |
|
ось O x |
(основание |
|||||||||||||||||||||
перпендикуляра – точка Dў). |
|
Тогда из геометрических |
соображений |
|||||||||||||||||||||||||||||
получаем, что |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
x = |
OA |
= |
ODў- |
|
|
ADў= |
ODў- |
FD |
= |
|
|
|
||||||||||||||||||||
= |
|
OD |
|
cos j |
- |
|
|
|
MD |
|
|
sin j |
= xўcos j |
|
- yўsin j , |
|
|
|
||||||||||||||
|
|
|
|
|
|
|
||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||
y = |
AM |
= |
|
AF |
+ |
|
|
|
FM |
= |
DDў+ |
MF |
= |
|
|
|
||||||||||||||||
= |
|
OD |
|
sin j |
+ |
|
|
|
MD |
|
cos j |
= xўsin j |
|
+ yўcos j . |
( |
|
) |
|||||||||||||||
|
|
|
|
|
|
|
||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
Таким образом, формулы, выражающие исходные координаты x; y |
|
|||||||||||||||||||||||||||||||
произвольной точки M через её новые координаты при повороте осей на угол j , имеют вид
181
м |
x |
ў |
- |
y |
ў |
|
пx = |
cos j |
sin j |
||||
п |
|
|
|
|
|
(26.5) |
н |
x |
ў |
+ |
y |
|
|
п |
ў |
|||||
опy = |
sin j |
|
cos j |
|||
Исходная система xO y получается поворотом новой системы O xўyў
на угол |
- j |
) |
. Поэтому, |
если в |
равенствах (26.5) поменять |
местами |
||||||||||||||
|
( |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
исходные и новые координаты, заменяя |
|
одновременно |
j |
на |
- j |
) |
, то |
|||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
( |
|
|
можно |
выразить |
новые |
координаты |
точки |
M |
|
через |
её |
исходные |
|||||||||||
координаты |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
м |
ў |
x cos j |
+ y sin j |
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
п |
x = |
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
п |
|
|
|
|
|
. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
н |
ў |
x sin j + |
y cos j |
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
п |
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
опy = - |
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
x2 |
y2 |
|
|
|
|
||
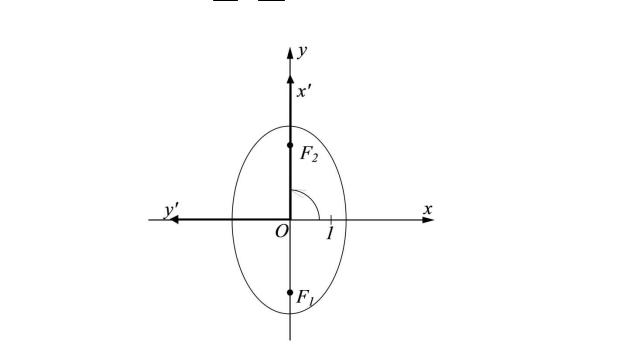
Рассмотрим, |
например, уравнение |
|
эллипса |
|
|
+ |
|
|
= 1. |
Оно не |
||||||||||
|
2 |
|
4 |
|||||||||||||||||
является каноническим, поскольку в |
|
|
a < b . |
|
|
|
|
|
|
|||||||||||
нём |
Чтобы |
поменять |
|
оси |
||||||||||||||||
местами, выполним поворот на угол |
j |
|
= 900 |
и |
|
перейдём к системе |
||||||||||||||
координат Оxўyў(рис. 26.5). В формулы (26.5) подставим |
cos ϕ = 0 и |
|||||||||||||||||||
sin ϕ = 1: |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
м |
|
ў |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
пx = - y |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
п |
|
. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
н |
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
п y = |
xў |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
оп |
|
|
|
|
|
|
|
|
|
|
|
|
|
Теперь, действительно, получилось каноническое уравнение
xў2 + yў2 = 1. 4 2
Рис. 26.5
182
|
|
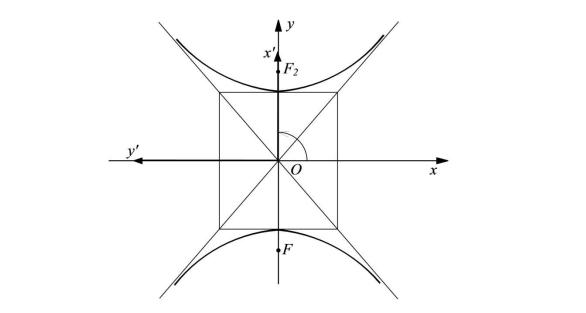
Аналогично рассмотренному примеру для приведения |
уравнения |
||||||
|
y2 |
− |
x2 |
= 1 к каноническому виду тоже выполним поворот на угол j = 900 |
|||||
|
b2 |
|
|||||||
|
|
a2 |
x′2 |
|
y′2 |
|
|||
В новой системе координат уравнение приобретёт вид |
− |
=1. Оно |
|||||||
|
|
||||||||
|
|
|
|
|
b2 |
a2 |
|||
определяет гиперболу, вершины и фокусы которой лежат на оси Oy . Эта гипербола называется сопряжённой по отношению к гиперболе (25.3). Они имеют одинаковые асимптоты (рис. 26.6).
Рис. 26.6
Для знакомого по школьной программе уравнения параболы y = x2
выполним тот же поворот на угол j = 900 (рис. 26.7) и получим в новых координатах каноническое уравнение xў= yў2 .
183
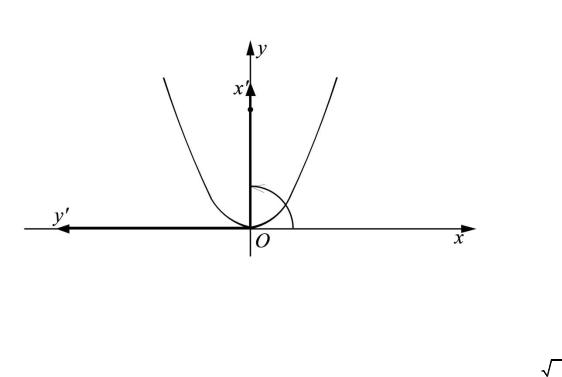
Рис. 26.7
Для приведения уравнения xy = 3 к каноническому виду рассмотрим
|
|
|
|
|
|
|
0 |
|
|
2 |
|
||
поворот на угол j = 45 |
|
. Подставив в формулы |
(26.5) cos 450 = sin 450 = |
|
|
||||||||
|
2 |
||||||||||||
и |
проделав соответствующие преобразования, |
получим в новой системе |
|||||||||||
координат |
каноническое уравнение |
равносторонней гиперболы |
|||||||||||
|
xў2 |
|
|
yў2 |
|
|
|
|
|
|
|
||
|
|
- |
|
|
= 1. Её асимптотами являются исходные оси координат O x и Oy |
||||||||
6 |
6 |
||||||||||||
|
|
|
|
|
|
|
|
|
|||||
(рис. 26.8). |
|
|
|
|
|
|
|
||||||
|
|
|
Итак, |
преобразования поворота и (или) |
параллельного переноса осей |
||||||||
координат используются для того, чтобы уравнение (26.2) в новой системе координат приобрело канонический вид. Проанализируем возникающие ситуации. Для этого рассмотрим коэффициенты A и C при квадратах переменных в канонических уравнениях основных линий и найдём их
произведение. Для канонического уравнения эллипса |
A = |
1 |
, C = |
1 |
, т.е. |
||||
a2 |
|
||||||||
|
|
|
|
|
|
|
b2 |
||
произведение AC > 0 ; для гиперболы |
A = |
1 |
, C = − |
1 |
, т.е. |
AC < 0; для |
|||
|
|
||||||||
параболы A = 0 , C = 1, т.е. AC = 0 . |
|
a2 |
b2 |
|
|
|
|||
Остальные |
виды |
канонических |
|||||||
уравнений можно распределить по типам таким образом, чтобы для каждого из уравнений первого типа число AC было положительно, отрицательно для второго и равно нулю для уравнений третьего типа.
184
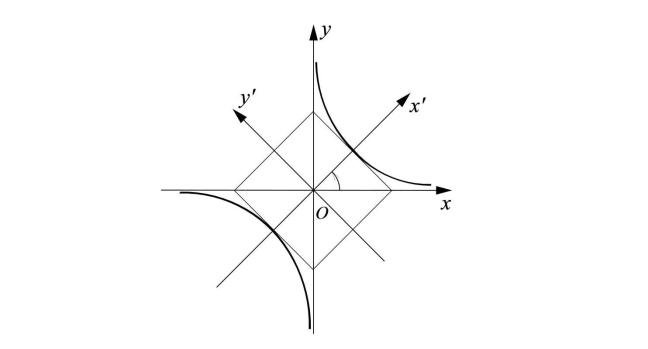
Рис. 26.8 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Тогда получаем классификацию: |
|
|||||||||||||||||||||
I. Эллиптический тип |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1) |
|
|
x2 |
|
|
+ |
|
|
y |
2 |
|
= 1 (эллипс), |
||||||||||
|
|
a2 |
|
|
|
|
b2 |
|
|
|||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
2) |
|
|
x2 |
|
+ |
|
y |
2 |
|
= 0 (точка), |
||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
a2 |
|
|
b2 |
|
||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||
3) |
|
|
x2 |
|
|
+ |
|
|
y |
2 |
|
= - 1 (пустое множество). |
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
a2 |
|
|
|
|
b2 |
|
|
||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
II. Гиперболический тип |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
4) |
|
x2 |
|
- |
|
|
y2 |
|
|
|
= 1 |
(гипербола), |
||||||||||
a2 |
|
|
b2 |
|
|
|
||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
5) |
|
x2 |
|
- |
|
y2 |
|
= 0 |
(пара пересекающихся прямых). |
|||||||||||||
|
a2 |
|
b2 |
|
|
|
||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
III.Параболический тип
6)y2 = 2 px (парабола),
7)y2 = a2 (пара параллельных прямых),
8)y2 = 0 (прямая),
9)y2 = - a2 (пустое множество).
185
Полученную классификацию можно использовать в любой задаче, связанной с уравнением второго порядка – даже если, например, в нём B ¹ 0 . Оказывается, по исходным коэффициентам уравнения (26.2), которые присутствуют в конкретной задаче, можно сразу определить, к какому типу относится линия, задаваемая этим уравнением:
I. |
Если |
AC − B2 > 0 , то уравнение задаёт линию, относящуюся к |
|||
эллиптическому типу. |
|
|
|
||
II. |
Если |
AC − B2 < 0 , то уравнение задаёт линию, относящуюся к |
|||
гиперболическому типу. |
|
|
|
||
III. |
Если |
AC − B2 = 0 , то уравнение задаёт линию, относящуюся к |
|||
параболическому типу. |
|
|
|
||
Например, |
уравнение xy = 3 , в котором A = C = 0, 2B =1, задаёт |
||||
линию гиперболического типа, так как в этом случае |
AC − B2 = − |
1 |
< 0 . |
||
|
|||||
Итак, |
|
проделали необходимую работу, |
4 |
|
|
мы |
чтобы полностью |
||||
разобраться с построением линий во всех ситуациях, к которым приводит уравнение второго порядка (26.2). Сначала определяем тип линии, задаваемой уравнением. Далее приводим его к каноническому виду, выполняя рассмотренные преобразования координат.
Лекция 27. Поверхности второго порядка
Переходим к изучению поверхностей в трехмерном пространстве. Будем рассматривать поверхности, задаваемые уравнениями, включающими вторые степени текущих координат x , y и z или их взаимное произведение. Уравнение вида
Ax2 + By2 + Cz2 + 2Dxy + 2Exz + 2Fyz + 2Gx + 2Hy + 2Kz + L = 0 , |
(27.1) |
где коэффициенты A, B,C, D, E ,F ,G , H ,K иL — любые действительные числа, но, по крайней мере, одно из чисел A, B или C отлично от нуля (т.е.
A2 + B2 + C 2 ¹ 0 ), называется общим уравнением поверхности второго порядка.
Также как и для кривых второго порядка, для поверхностей второго порядка существует полная классификация. С помощью подходящего параллельного переноса и поворота осей координат (теперь уже выполняемых в пространстве) любое уравнение второго порядка может быть приведено к одному из семнадцати видов. Этим уравнениям в пространстве отвечают классические поверхности: эллипсоид, однополостный и двуполостный гиперболоиды, конус, эллиптический и
186
гиперболический параболоиды, а также целая группа поверхностей, называемых цилиндрическими.
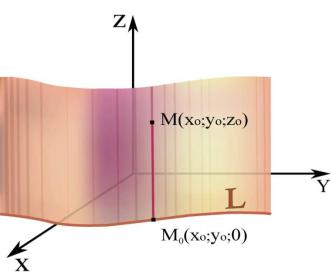
27.1. Цилиндрические поверхности. Поверхность, состоящая из параллельных прямых (так называемых образующих), проходящих через каждую точку заданной линии L (направляющей), называется
цилиндрической поверхностью. Образно можно представить, что цилиндрические поверхности образуются движением прямой, которая перемещается в пространстве вдоль кривой L , сохраняя постоянное направление (рис. 27.1).
В качестве направляющей цилиндрической поверхности рассмотрим расположенную в плоскости xOy линию L , которая задаётся уравнением
F(x, y) = 0. Пусть M 0 (x0 , y0 ,0) – |
произвольная точка направляющей (рис. |
27.1). Тогда F (x0 , y0 ) = 0 . |
Если рассматривать цилиндрическую |
поверхность, образующие которой параллельны координатной оси Oz , то уравнение образующей, проходящей через точку M 0 (x0 , y0 ,0) , примет вид
x = x |
|
|
0 |
y = y0 . |
|
|
|
Рассмотрим произвольную точку M ( x0 , y0 , z0 ) этой образующей. Её |
|
координаты удовлетворяют уравнению |
F ( x, y) = 0 при любом значении |
переменной z . Точка M 0 (x0 , y0 ,0) выбиралась произвольно, поэтому можно
утверждать, что координаты всех точек цилиндрической поверхности удовлетворяют уравнению F ( x, y) = 0 .
Рис. 27.1
187
Ясно, что уравнение вида F ( x, z) = 0 задаёт цилиндрическую поверхность с образующими, параллельными оси Oy , а уравнение вида
F ( y, z) = 0 задаёт цилиндрическую поверхность с |
образующими, |
параллельными оси O x . |
|
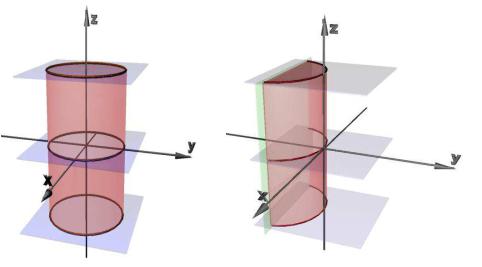
Рис. 27.2
Если направляющей цилиндрической поверхности является кривая второго порядка, то поверхность называется цилиндрической поверхностью второго порядка (или цилиндром второго порядка). В зависимости от конкретного вида уравнения получаются различные типы цилиндров второго порядка. Их названия соответствуют названиям направляющих линий L .
Например, уравнение |
x2 |
+ |
y2 |
= 1 задаёт в пространстве |
|
a2 |
b2 |
||||
|
|
|
цилиндрическую поверхность с образующими, параллельными оси Oz . Его направляющей является эллипс, а поверхность, задаваемая этим уравнением, называется эллиптическим цилиндром (рис. 27.2). Частным случаем эллиптического цилиндра является круговой цилиндр. Его
уравнение в каноническом виде имеет вид |
x2 + y2 = R2 . |
||||
Уравнение вида |
|
|
x2 = −2 py |
определяет в пространстве |
|
параболический цилиндр (рис. 27.2). |
|
||||
Уравнение вида |
y2 |
− |
x2 |
= 1 определяет в пространстве |
|
b2 |
|
||||
|
|
a2 |
|
||
гиперболический цилиндр (рис. 27.3).
188

Рис. 27.3
27.2. Поверхности вращения образуются вращением какой-либо плоской линии L (образующей) вокруг прямой (оси поверхности вращения), расположенной в плоскости этой линии. Примером служит сфера: её можно рассмотреть как поверхность, образованную вращением полуокружности вокруг её диаметра. Покажем, как можно получить уравнение поверхности вращения, исходя из уравнения образующей (лежащей в одной из координатных плоскостей) и уравнения оси вращения
(совпадающей с |
одной из координатных осей, расположенных в той же |
||||||
плоскости). |
|
|
|
|
|
|
|
Будем |
вращать |
|
расположенный в плоскости |
yOz эллипс с |
|||
уравнением |
|
y2 |
+ |
z2 |
= 1 |
вокруг координатной оси |
Oz . Полученную |
|
b2 |
c2 |
|||||
|
|
|
|
|
|
||
поверхность рассечём плоскостью, параллельной координатной плоскости xOy и проходящей через фиксированную точку O′(0, 0, z) (рис. 27.4).
Рис. 27.4
189