

4. 3. Гармонический осциллятор. Примеры гармонических осцилляторов. @
Тела, которые при движении совершают гармонические колебания, называют гармоническими осциляторами. Рассмотрим ряд примеров гармонических осциляторов.
Пример1. Пружинный маятник – это тело массой m, способное совершать колебания под действием силы упругости невесомой (mпружиныmтела) пружины (рис.4.2).
Рис.4.3. Физический
маятник.

![]() , гдеk
- коэффициент упругости
(жесткости) пружины. По второму закону
Ньютона
, гдеk
- коэффициент упругости
(жесткости) пружины. По второму закону
Ньютона ![]() .
Отсюда
.
Отсюда![]() и, если обозначить
и, если обозначить![]() ,
тогда получим
,
тогда получим![]() дифференциальное уравнение
гармонических колебаний. Его решения
имеют вид
дифференциальное уравнение
гармонических колебаний. Его решения
имеют вид![]() либо
либо![]() .
Таким образом, колебания пружинного
маятника - гармонические с циклической
частотой
.
Таким образом, колебания пружинного
маятника - гармонические с циклической
частотой![]() и периодом
и периодом![]() .
.
Пример
2. Физический
маятник - это твердое тело, совершающее
колебания под действием силы тяжести
вокруг подвижной горизонтальной
оси, не совпадающей с его центром
тяжести С (рис. 4. 3).
Ось проходит через точку О. Если маятник
отклонить от положения равновесия
на малый угол
и отпустить, он будет совершать
колебания, следуя основному уравнению
динамики вращательного движения твердого
тела
![]() ,
гдеJ
- момент инерции
маятника относительно оси, М ‑ момент
силы, возвращающей физический маятник
в положение равновесия. Он создается
силой тяжести
,
гдеJ
- момент инерции
маятника относительно оси, М ‑ момент
силы, возвращающей физический маятник
в положение равновесия. Он создается
силой тяжести
![]() ,
ее момент равен
,
ее момент равен![]() (l=ОС).
В результате получаем
(l=ОС).
В результате получаем ![]() . Это
дифференциальное уравнение колебаний
для произвольных углов отклонения. При
малых углах, когда
. Это
дифференциальное уравнение колебаний
для произвольных углов отклонения. При
малых углах, когда
![]() ,
,![]() или, принимая
или, принимая![]() ,
получим дифференциальное уравнение
колебания физического маятника
,
получим дифференциальное уравнение
колебания физического маятника![]() .
Его решения имеют вид
.
Его решения имеют вид![]() или
или![]() .
Таким образом, при малых отклонениях
от положения равновесия физический
маятник совершает гармонические
колебания с циклической частотой
.
Таким образом, при малых отклонениях
от положения равновесия физический
маятник совершает гармонические
колебания с циклической частотой![]() и периодом
и периодом![]() .
.
Пример3. Математический маятник - это материальная точка с массой m (тяжелый шарик малых размеров), подвешенная на невесомой (по сравнению с m шарика), упругой, нерастяжимой нити длинною l. Если вывести шарик из положения равновесия, отклонив его от вертикали на небольшой угол , а затем отпустить, он будет совершать колебания. Если рассматривать данную систему как физический маятник с моментом инерции материальной точки J = ml2, то из формул для физического маятника получим выражения для циклической частоты и периода колебаний математического маятника
![]() ,
,
![]() .
.
4. 4. Затухающие колебания. @
В рассмотренных примерах гармонических колебаний единственной силой, действующей на материальную точку (тело), была квазиупругая сила F и не учитывались силы сопротивления, которые присутствуют в любой реальной системе. Поэтому рассмотренные колебания можно назвать идеальными незатухающими гармоническими колебаниями.
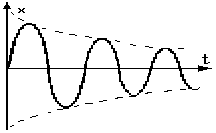
Наличие в реальной колебательной системе силы сопротивления среды приводит к уменьшению энергии системы. Если убыль энергии не пополнять за счет работы внешних сил, колебания будут затухать. Затухающими называются колебания с уменьшающейся во времени амплитудой.
Рассмотрим
свободные затухающие колебания. При
небольших скоростях сила сопротивления
FC
пропорциональна скорости v
и обратно пропорциональна ей по
направлению
![]() ,
гдеr
- коэффициент
сопротивления
среды. Используя второй
закон Ньютона,
получим дифференциальное уравнение
затухающих колебаний
,
гдеr
- коэффициент
сопротивления
среды. Используя второй
закон Ньютона,
получим дифференциальное уравнение
затухающих колебаний
![]() ,
,![]() ,
,![]() .
Обозначим
.
Обозначим![]() ,
,![]() .
Тогда дифференциальное уравнение
приобретает вид:
.
Тогда дифференциальное уравнение
приобретает вид:
Рис.4.4. Зависимость
смещения и амплитуды затухающих
колебаний от времени.
![]() .
.
Это дифференциальное уравнение затухающих колебаний. Здесь 0 - собственная частота колебаний системы, т.е. частота свободных колебаний при r=0, - коэффициент затухания определяет скорость убывания амплитуды. Решениями этого уравнения при условии 0 являются
![]() либо
либо
![]() .
.
График
последней функции представлен на
рис.4.4. Верхняя пунктирная линия дает
график функции
![]() ,
А0
- амплитуда в начальный момент времени.
Амплитуда во времени убывает по
экспоненциальному закону,
- коэффициент затухания по величине
обратен времени
релаксации ,
т.е. времени за которое амплитуда
уменьшается в e
раз, так
как
,
А0
- амплитуда в начальный момент времени.
Амплитуда во времени убывает по
экспоненциальному закону,
- коэффициент затухания по величине
обратен времени
релаксации ,
т.е. времени за которое амплитуда
уменьшается в e
раз, так
как
 ,
,
![]() , = 1,
, = 1,
![]() .
Частота и период затухающих колебаний
.
Частота и период затухающих колебаний![]() ,
,![]() ;
при очень малом сопротивлении среды
(202)
период колебаний практически равен
;
при очень малом сопротивлении среды
(202)
период колебаний практически равен
![]() .
С ростом
период колебаний увеличивается и при
>0
решение
дифференциального уравнения показывает,
что колебания не совершаются, а происходит
монотонное движение системы к положению
равновесия. Такое движение называют
апериодическим.
.
С ростом
период колебаний увеличивается и при
>0
решение
дифференциального уравнения показывает,
что колебания не совершаются, а происходит
монотонное движение системы к положению
равновесия. Такое движение называют
апериодическим.
Для характеристики скорости затухания колебаний служат еще два параметра : декремент затухания D и логарифмический декремент . Декремент затухания показывает во сколько раз уменьшается амплитуда колебаний за время одного периода Т.

Н
Рис.4.5. Вид
резонансных кривых.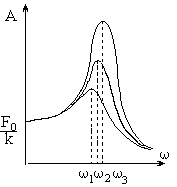
![]() .
Так как
.
Так как![]() ,
то
,
то ,
гдеN
- число колебаний за время
,
гдеN
- число колебаний за время![]() .
.