

Методичка по подготовке к лабораторным работам
.pdfРис. 35
Рис. 36
51
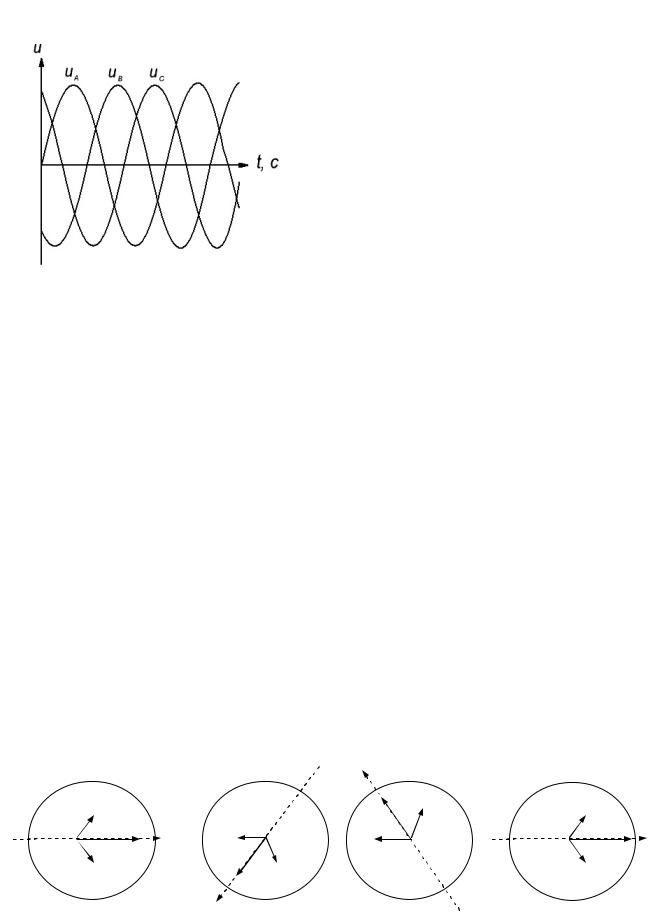
Рис. 37
Если подключить катушки статора АХ,ВY,CZ (рис.35) к 3-х фазному напряжению, то ток в каждой из катушек будет изменяться в соответствии с временной диаграммой изменения 3-х фазного напряжения (рис.37) , соответственно магнитное поле создаваемое этими токами будет изменяться аналогичным образом. В каждый момент времени магнитные поля каждой из катушек суммируются и дают результирующее поле. Рассмотрим процесс получения результирующего поля в моменты времени когда токи в фазах А, В и С максимальны и положительны ( интервал времени составит одну треть периода Т/3) .
Пусть в момент времени t1 ток катушки АХ IA положительный и поле этой катушки направлено вдоль оси этой катушки. В это же время токи катушек фаз В и С отрицательны и их магнитные поля
направлены |
противоположно их осям. Оси катушек расположены |
|||||
под углом |
120°. |
Сумма 3х-полей дает |
магнитное |
поле |
||
направленное вдоль оси катушки АХ (рис.38). |
|
|
||||
t1 |
|
t2=t1+T/3 |
Y |
t3=t2+T/3 |
t4= t3+T/3 |
|
|
|
|
C |
|
|
|
ВB |
|
|
|
ВC |
|
ВB |
|
|
|
ВB |
|
||
Х |
ВA А |
ВA |
|
ВA |
Х |
ВA А |
ВC |
|
ВB |
|
|
|
ВC |
|
ВC |
|
|
|
||
|
|
|
|
|
|
|
|
|
B |
|
|
Z |
|
|
|
B |
|
|
|
|
Рис. 38 |
|
|
Рис. 40 |
Рис. 41 |
||
|
Рис. 39 |
|
||||
|
|
|
52 |
|
|
|
Аналогичные рассуждения в моменты времени |
t2=t1+T/3 и |
||
t3=t3+T/3 |
дают результирующие поля вдоль осей |
BY |
второй |
катушки |
и CZ третьей катушки соответственно. |
Через |
время |
равное периоду Т вектор магнитного поля вновь будет расположен вдоль оси АХ первой катушки. Таким образом, мы получили вращающееся магнитное поле. В каждый момент времени поле направлено перпендикулярно продольной оси статора.
Часть магнитного поля статора выходит из статора и замыкается по воздуху. Это поля рассеяния. Они не участвуют в процессе передачи энергии от статора к ротору.
Вопрос 4. Как осуществить реверс двигателя?
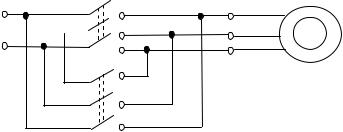
Ответ 4. Для осуществления реверса двигателя необходимо сменить направление вращения магнитного поля статора. Это достигается изменением порядка чередования фаз питания (рис.42). Включение Q1 прямой ход , включение Q2 – обратный ход.
Q 1
А
В 

С
Q 2
Рис. 42
Вопрос 5. Что такое режим идеального холостого хода в двигателе?
Ответ 5. Режим идеального холостого хода двигателе – это режим работы в отсутствии нагрузки на валу. При этом частота вращения ротора совпадает с частотой вращения магнитного поля и скольжение S=0.
Вопрос 6. Почему ток холостого хода асинхронного двигателя больше тока холостого хода трехфазного трансформатора такой же мощности?
1. В АД , так же как и в трансформаторе , ток роторе возникает благодаря процессу взаимоиндукции. В режиме холостого хода
53

ротор АД вращается, преодолевая момент сил сопротивления в подшипниках и трение о воздух. На создание этого момента
необходим ток в роторе. |
Следовательно, по обмотке ротора (аналог |
|||||
вторичной обмотки |
трансформатора) |
протекает |
ток |
IАД20., а в |
||
обмотке статора ток |
IАД10 В трансформаторе в режиме холостого |
|||||
хода |
ток во вторичной обмотке отсутствует |
IТР |
20= 0 , а в |
|||
первичной обмотке |
IТР10 . Уравнения магнитного состояния |
|||||
трансформатора и АД |
одинаковы : I10 = I1- יI 2.→ : I1=I10 + יI 2. Из |
|||||
уравнений следует, |
что в АД ток IАД1 |
статора больше тока в |
||||
первичной обмотке трансформатора IТР1.
2. В АД имеется воздушный зазор между ротором и статором,
следовательно рассеяние магнитного потока |
больше |
чем |
трансформаторе, а значит и энергетические потери больше. |
Это |
|
требует увеличения тока статора. |
|
|
Вопрос 7. Чему равно скольжение в номинальном, критическом, пусковом режимах и при холостом ходе?
Ответ 7:
a) При пуске n2=0 s=(n1-n2)/n1= 1
б) При идеальном холостом ходе n2= n1, s=(n1-n2)/n1=0.
В) В номинальном режиме sном=ΔРэ2/Рэм= (Рномэм -Рноммех)/ Рномэм. Рэ2 электрические потери в роторе, Рэм- электромагнитная
мощность
Рномэм = 2π· n1 · Мном , Рноммех - указывается в техническом паспорте двигателя.
Обычно sном =1,5÷7%.
г) В критическом режиме Skp |
|
r2, |
|
|
, где r,2 = к·r2, r2 - |
|
|
|
|
|
|
||
|
|
|||||
|
|
r2 |
x2 |
|||
1 |
|
k |
||||
активное сопротивление ротора, к – обмоточный коэффициент, r1 – активное сопротивление статора, хК= х1+х,2 – сумма индуктивных сопротивлений статора и приведенного индуктивного сопротивления ротора.
Вопрос 8. Показать на механической характеристике основные режимы работы асинхронного двигателя.
Ответ 8 . Механическая характеристика двигателя это зависимость числа оборотов ротора от момента на валу n2=f(Мн).
54
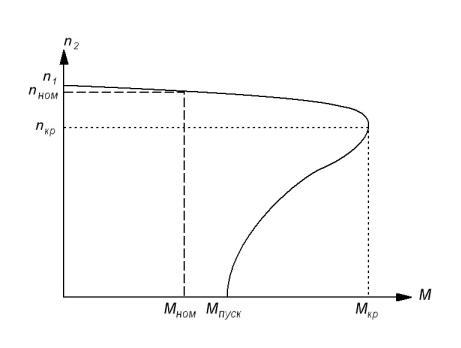
В установившемся (статическом) режиме электромагнитный момент на валу двигателя равен моменту сил нагрузки (моменту сил сопротивления) Мэм=Мн . На графике механической характеристики (рис.42) можно выделить характерные области:
1.М=0, М → Мпуск →пуск двигателя , разгон от n2=0 до n2= n1 (1-S). Если нагрузка на валу МН=0, то n2=n1 →холостой ход.
2.Если 0<М<Мном → область недогрузки, 3.М=Мном→номинальный режим ,
4.Мкр>М>Мном →область перегрузки, 5.М >Мкр → n2→0, остановка двигателя.
Рис. 43
Асинхронный двигатель может работать в 3-ех режимах.
55
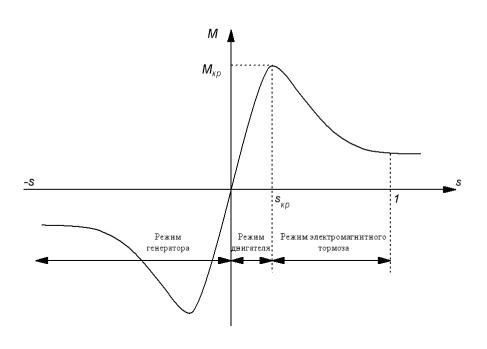
Рис. 44
Вопрос 9. Перечислить и объяснить основные способы регулирования частоты вращения асинхронного двигателя.
Ответ 9 : Частота вращения АД с кз ротором дается формулой:
n2=60f(1-s)/p,
где f – напряжения питающей сети; s – скольжение;
р – число пар полюсов статора.
Следовательно, частоту вращения асинхронного двигателя можно регулировать изменяя:
а) частоту f напряжения питающей сети. Для этого применяют полупроводниковые преобразователи;
б) изменяя число пар полюсов (ступенчатое регулирование).
в) скольжение можно изменять только в асинхронном двигателе с фазным ротором.
Вопрос 10: В чем особенности пускового режима асинхронного двигателя?
Ответ 10 : При прямом пуске АД ток потребляемой из сети в 5-8 раз превышает номинальный ток, при этом пусковой момент мал.. Поэтому применяют различные способы уменьшения
56

пускового тока .
1)Уменьшают напряжения питающей сети используя переключение с треугольника на звезду, используя автотрансформаторы.
2)Используют роторы в виде 2-го беличьего колеса. В момент пуска при больших токах суммарное индуктивное
сопротивление ротора зависит от скольжения. |
С увеличением |
скольжения оно увеличивается, при уменьшении |
уменьшается. |
Это позволяет создавать хороший пусковой момент и уменьшать пусковой ток.
Вопрос 11. Перечислить и сравнить различные способы пуска асинхронного двигателя с короткозамкнутым ротором.
Ответ 11: Пусковые свойства АД определяются следующими величинами:
Пусковым током, начальным пусковым вращающим моментом, плавностью и экономичностью пускового процесса, длительностью пуска.
Способы пуска асинхронного двигателя с короткозамкнутым ротором:
1)Прямойнепосредственное подключение к сети. При этом пусковой ток IП составляет 6-8 Iном, пусковой момент 1-2 Мном. Метод применим для двигателей малой и средней мощности <200квт. Частые прямые включения мощного двигателя могут привести к колебаниям энергии в силовой сети, что опасно для нее.
2)Уменьшают напряжение питающей сети используя переключение с треугольника на звезду, Метод применим для двигателей малой и средней мощности <200квт. Уменьшение
напряжения на обмотках происходит в 
 3 раз, а пусковой ток в 3 раза.
3 раз, а пусковой ток в 3 раза.
**) Уменьшение напряжения на обмотках может уменьшать пусковой момент и он станет меньше требуемого т.е меньше момента нагрузки. Ротор просто не сможет вращаться.
3) используя регулируемые автотрансформаторы, при этом уменьшение напряжения в 
 2 раз вызывает уменьшение пускового тока и пускового момента в 2 раза.
2 раз вызывает уменьшение пускового тока и пускового момента в 2 раза.
4. Включают в каждую фазу по дросселю (реактору). Дроссель ограничивает пусковой ток, но одновременно уменьшается
57
пусковой момент.
5) Используют роторы в виде двойного беличьего колеса. В таком роторе суммарное индуктивное сопротивление 2-х беличьих колес зависит от скольжения. С увеличением скольжения оно увеличивается, при уменьшении уменьшается. Это позволяет создавать хороший пусковой момент и уменьшать пусковой ток.
Вопрос 12: Объяснить особенности рабочих характеристик асинхронного двигателя.
Ответ 12: Рабочие характеристик асинхронного двигателя это зависимости n, M, сosφ, I1, P1 , КПД – η от полезной мощности на валу Р2. представлены на рис.45.
n
|
Р1 |
cosφ |
I1 |
|
η |
|
М |
|
Р2 |
Р2ном |
|
Рис. 45 |
|
а) Зависимость η=f(P2)
КПД двигателя η= P2/ P1= P2/ Р+ P2
P1 – мощность, поступившая из сети в двигатель, P2 – полезная мощность на валу двигателя,
P1= Р+ P2
Р= мощность всех потерь в двигателе: электрических и магнитных потерь в статоре, электрических потерь в роторе и механических потерь ( трение в подшипниках , трение о воздух)
.Потери в обмотках изменяются как I2 . Т.о. по мере роста нагрузки
ток двигателя растет, а потери растут |
быстрее. Поэтому в начале |
по мере роста нагрузки КПД растет |
быстро, а затем медленно и |
достигает максимума при 70-75% |
нагрузки. При дальнейшем |
58

увеличении нагрузки |
Р2 потери значительно возрастают и КПД |
уменьшается. |
|
б) Зависимость М=f(P2) |
|
По определению |
в статическом режиме Мэм=Мнагрузки |
поэтому М эм= P2/ ω2
где ω2= ω1 ·(1-S) угловая частота вращения ротора.
ω1- угловая частота вращения магнитного поля , S-скольжение. Поэтому зависимость М=f(P2) линейная.
в) Зависимость сosφ =f(P2)
В АД имеет место два энергетических процесса: а) Необратимый расход активной энергии Р1 и
б) Обратимый процесс периодического изменения запаса энергии магнитного поля, мерой которая является реактивная мощность Q1,
Соотношение между активной мощностью и реактивной
мощностью оценивается |
|
коэффициентом мощности |
двигателя |
|
сosφ =Р / S, где S UI |
P |
2 Q 2 |
|
|
1 |
1 |
1 |
|
|
Коэффициент мощности |
двигателя зависит от нагрузки на его |
|||
валу. При холостом ходе, энергия расходуется только на |
покрытие |
|||
небольших электрических и магнитных потерь в статоре и незначительных механических потерь в подшипниках., Это означает, что активная мощность мала, а реактивная велика, поэтому сosφ мал. Обычно сosφхх =0,08÷0,15. С увеличением нагрузки активная мощность Р1 так же увеличивается , а реактивная Q1 изменяется незначительно. При нагрузке Р2 =Р2ном сosφ достигает максимума сosφmax =0,75÷0,95. ри дальнейшем увеличении нагрузки из за увеличения потоков рассевания Q1
растет и сosφ |
уменьшается. |
|
|
|
|
В виду |
массового |
применения |
АД |
в |
производстве, |
использование их с сosφ<0,45 нежелательно, |
такие двигатели надо |
||||
заменить на более экономичные. |
|
|
|
||
г) Зависимость n2 =f(P2) |
связаны |
зависимостью |
|||
Скорость |
вращения |
и скольжение |
|||
n2=n1(1-S).
В режиме холостого хода скольжение S~0 и скорость вращения ротора близка к скорости вращения магнитного поля: n2~n1. С
59
увеличением нагрузки ток ротора возрастает и вызывает нагрев его обмотки. На этом участке электрические потери в роторе Р2э пропорциональны скольжению:
Р2Э=s·Р2ЭМ
где Р2ЭМ – электромагнитная мощность, предаваемая от статора к ротору.
При нагрузке Р2 =Р2ном |
скольжение так же номинальное sном, |
=1.5÷7%, при это этом n2 |
= n2ном незначительно отличается от n1 . |
Можно говорить , что АД имеет жесткую характеристику. При
увеличении нагрузки |
выше номинальной ( |
область перегрузки ) |
||
скорость n2 |
начинает |
уменьшаться и при |
нагрузки |
выше |
критической Р2> Р2крит двигатель останавливается . |
|
|||
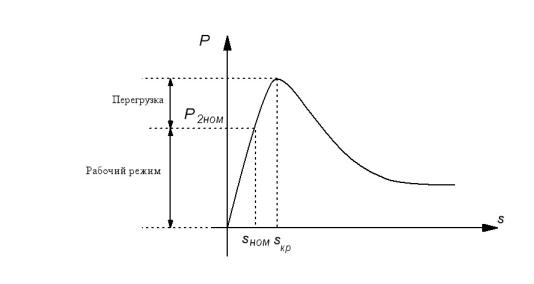
д) Зависимость S =f(P2) |
|
|
||
Зависимость |
скольжения S =f(P2) имеет вид (рис. 46): |
|
||
Рис. 46
В режиме холостого хода скольжение
S = 0. С увеличением нагрузки скольжение увеличивается. При нагрузке Р2 =Р2ном скольжение номинальное sном, =1.5÷7%. При дальнейшем увеличении нагрузки P2
(область перегрузки) скольжение быстро возрастает и достигает критического значения Sкр. Дальнейшее увеличение нагрузки приводит к увеличению скольжения и неустойчивому режиму работы двигателя или к его остановке.
е) Зависимость I1=f(P2)
60