

15. Запаздывание в объектах и регуляторах
В реальных объектах (регуляторах) изменение регулируемого параметра начинается не сразу после нанесения возмущения, а спустя некоторое время. Это время называют запаздыванием. Различают 2 вида запаздывания: чистое (транспортное) – τ0; ёмкостное - τё.
В одноёмкостном объекте имеется только чистое запаздывание τ0. Оно вызывается наличием в регулируемом объекте участков, по которым распространение сигнала требует некоторого времени.
В многоёмкостном, (двух и более объектов), кроме чистого имеется еще и ёмкостное запаздывание τё. Оно обусловлено гидравлическими тепловыми и другими сопротивлениями. Эти сопротивления вызывают замедленный переход вещества из одной емкости в другую.
16. Влияние емкости на постоянную времени объекта
Рассмотрим динамическую характеристику одноёмкостного объекта с самовыравниванием с учётом запаздывания (рис. 2.9).
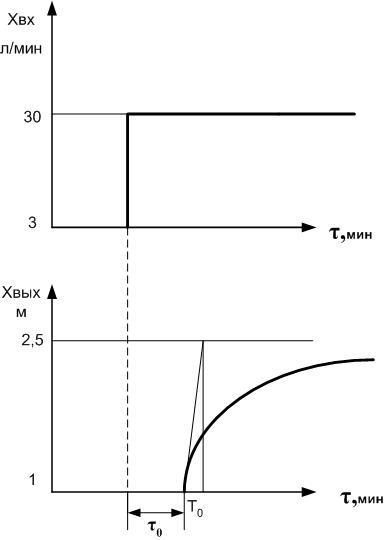
Рис. 2.9. Динамическая характеристика одноёмкостного объекта
с самовыравниванием с учётом запаздывания.
Как следует из рис.2.9 кривая разгона смещается вправо на время чистого (транспортного) запаздывания τ0.
17. Автоматические регуляторы. Определение закона регулирования регулятора (на примере сар теплообменника). Классификация линейных регуляторов. Нелинейный регулятор (пример)
Автоматический регулятор – это совокупность устройств, при помощи которых автоматически поддерживается значение регулируемой величины с той или иной точностью по отношению к заданному значению. По роду используемой энергии регуляторы подразделяют на:
пневматические;
гидравлические;
электрические;
электрогидравлические.

Зависимость μ = f (σ) в неустановившемся режиме называется законом регулирования регулятора, где σ = (Ттек – Тзад) – сигнал рассогласования, μ – закон перемещения затвора регулирующего органа, t – время. Здесь:
Ттек – текущее значение регулируемого параметра;
Тзад– заданное значение регулируемого параметра.
Динамическая характеристика регулятора как динамического звена рассматривается всегда в следующих координатах:


В зависимости от закона регулирования регулятора бывают линейные и нелинейные.
В настоящее время роль регуляторов выполняют программируемые контроллеры. В них запрограммирован закон регулирования (чаще всего – ПИД закон).
Классификация линейных регуляторов
П-регулятор (пропорциональный);
И-регулятор (интегральный);
ПИ-регулятор (пропорционально-интегральный (изодромный));
Регуляторы с предварением (с опережением):
ПД-регулятор (пропорционально-дифференциальный);
ПИД-регулятор (пропорционально-интегрально-дифференциальный).
з нелинейных регуляторов самый популярный позиционный регулятор.
18. Законы регулирования: п, и, пи, пд, пид-регуляторы. Их достоинства и недостатки (на примере сар температуры теплообменника)
П-регулятор
Это регулятор, у которого μ пропорционально σ, т.е.
μ = – Кσ.
При скачке входной величины σ на значение (–10ºС) затвор регулирующего органа переходит в новое μ - положение скачком (рис.2.10).

Рис.2.10. Закон регулирования П-регулятора.
Достоинство такого регулирования: регулирующий орган быстро перемещается на новое положение, т.е. высокая скорость регулирования (t – время).
Недостаток: имеет место остаточное отклонение, т.е. имеет место некоторая ошибка регулирования
И-регулятор
Это регулятор, у которого μ пропорционально интегралу σ

При скачке входной величины на значение (–10ºС) затвор регулирующего органа медленно переходит в новое положение (рис.2.11).

Рис.2.11. Закон регулирования И-регулятора.
Достоинство: отсутствие остаточного отклонения регулируемого параметра от заданного значения.
Недостаток: низкая скорость регулирования, т.е. затвор в новое положение перемещается медленно.
ПИ-регулятор
Это параллельное соединение предыдущих двух регуляторов (П и И - регуляторов). Этот регулятор сочетает положительные моменты П и И -регуляторов. У ПИ-регулятора (рис.2.12) регулирующее воздействие μ перемещает затвор пропорционально отклонению параметра σ и интегралу отклонения σ.
 ,
,
где: К, Ти – параметры настройки регулятора. Как видим, формула данного закона – это сумма двух предыдущих формул. Затвор регулирующего органа часть пути пройдет скачком по П-закону, а оставшуюся часть – медленно по И - закону.

Рис.2.12. Закон регулирования ПИ-регулятора.
Регуляторы с предварением
ПД-регулятор
Это такой регулятор (рис.2.13), у которого выходной сигнал μ пропорционален входному сигналу σ и производной dσ/dt, т.е.
 .
.
 Рис.2.13.
Закон регулирования ПД-регулятора.
Рис.2.13.
Закон регулирования ПД-регулятора.
Производная dσ/dt характеризует тенденцию изменения (отклонения) регулируемой величины. Величина и знак воздействия от производной позволяют регулятору как бы предвидеть в какую сторону и на сколько отклонилась бы регулируемая величина под действием данного возмущения. Это предвидение позволяет регулятору предварять своим воздействием возможное отклонение регулируемой величины. В результате процесс регулирования завершается в более короткое время.
Сначала затвор скачком переходит из точки а в точку в (П – закон), т.е. больше чем надо, затем отскакивает назад в точку б (дифференциальное действие), и остаётся в этом положении.
ПИД-регулятор.
У него 3 родителя: П-регулятор, И-регулятор, ПД-регулятор. Соответственно складываются 3 формулы (рис.2.14.)
 .
.
Здесь: К, Ти, Тд – параметры настройки, которые можно настроить вручную.
 Рис.2.14.
Закон регулирования ПИД-регулятора.
Рис.2.14.
Закон регулирования ПИД-регулятора.
ПИД - закон используется во всех контроллерах. Сначала затвор скачком переходит из точки а в точку в (П – закон), т.е. больше чем надо, затем отскакивает назад в точку б (дифференциальное действие), а далее затвор медленно перемещается в конечное положение (И – закон). В результате процесс регулирования завершается в более короткое время и с меньшей погрешностью регулирования.