

ЗАСТЕЛА М.Ю. Основы радиоэлектроники и связи
хронизатор; УЗ – устройство задержки; СГ – синхронизируемый гетеродин;ПГ –перестраиваемый генератор;ИЗМ–измерительфазы).
С помощью перестраиваемого генератора осуществляется переход бортового приемника на разные частоты. В системе всестанции – ведущаяиведомые–работаютна одинаковойчастотеfT.Сигналыимеют вид импульсов длительности Ти и излучаются с периодом Тсл. Сигналведущей станцииуправляетработой ведомыхстанцийи бортовым устройством. Для выделения этих импульсов на фоне сигналов ведомыхстанцийониотличаютсяподлительности.Нарис.17.34показаны
сигналы ведущей Sвщ и ведомых Sвм1, Sвм2 станций.
Сигналыотвсехстанций приходятна входбортовогоустройства поочередно, не накладываясь друг на друга. Сигналы имеют разные фазы; в фазовом сдвиге содержится информация о разности расстояний.Предполагаяналичиепоправкинафазовыйсдвиг,возникшийпри распространениисигналаотведущейстанции вдольбазовыхлинийБ1
и Б ,можем записать: D |
1 c |
и |
D2 |
2 c |
, |
где |
1 |
и |
2 |
– |
|
|
|||||||||||
|
|
||||||||||
2 |
1 |
Т |
|
|
Т |
|
|
|
|||
|
|
|
|
|
|
|
|
|
|||
сдвиг фаз междусигналами ведомых станций (ведомая 1 и ведомая 2) исигналомведущейстанции.Ноприразновременномприходеимпульсных сигналов измерение фазового сдвига невозможно. Для решения этойзадачи необходимозапомнитьфазуодногоизсигналов, например от ведущей станции. Это решается с помощью следящей системы, состоящей из синхронизирующего гетеродина СГ и фазового детектора ФД. Сигналы ведущей станции синхронизируют гетеродин и его частота и фаза управляются принятым сигналом. Он создает непрерывное гармоническое колебание Sсг. Напряжение с входа гетеродина СГ подается на измерители фазы ИЗМ1 и ИЗМ2, в которыхизмеряется фазовый сдвигмеждусигналами ведомыхстанций и запомненной фазой сигнала ведущей. Для обеспечения прихода соответствующих сигналов на фазометры и синхронизирующий гетеродин используется коммутатор КОМ, управляемый от синхронизатора СИНХ, в котором используется отличиеподлительности сигнала ведущей станции от сигналовведомых.УвеличениепериодаповторенияТслведеткувеличению
278

Глава 17. Радиосистемы радиоуправления, извлечения и разрушения информации
длительностиимпульса.ПриТсл=1с,Ти=200мсполоса,занимаемаясистемой,составляет10Гц.ПриТс=20с,Ти=1сполосасоставляет1Гц.Однако какотрицательноеявлениепроявляетсядискретностьизмерений–завремя дискрета объект может переместиться на недопустимое расстояние. Фазоимпульсные системы характеризуются высокой аппаратурной точностью, так как информация содержится в разности фаз и случайныефлуктуации фазывприемномустройственеоказываютвлияниянарезультат.
|
|
Ведущая |
РНТв |
|
|
|
ЗГ |
М |
|
УМ |
|
|
|
|
Б1 |
Б2 |
|
|
|
|
|
|
|
|
|
|
|
РНТ2 |
Ведомая |
ЕО |
ПР |
РНТ1 |
D2 |
2 |
|
|
|||||
ФД |
СИ |
УМ |
D1 |
|
|
|
|
1 |
|||
|
УЗ |
|
|
|
|
|
|
ПРМ |
ИЗМ1 |
||
|
|
|
2 |
||
СГ |
М |
|
|
КО |
|
|
|
М |
ИЗМ2 |
||
|
|
|
|
ПГ |
|
|
|
|
|
Синх. |
ФД СГ |
|
Рис. 17.33. Фазоимпульсная РНС |
||||
Тив |
|
|
Sвщ |
|
|
Тсл |
t |
|
Sвм1 |
||
Ти |
t |
|
Sвм2 |
||
|
||
|
t |
|
|
Sсг |
|
|
t |
Рис. 17.34. Временные диаграммы работы фазоимпульскной РНС
279

ЗАСТЕЛА М.Ю. Основы радиоэлектроники и связи
Рассмотренному варианту реализации фазоимпульсной РНС присущ недостаток – неоднозначность определения дальности. Крометого, имеетместоявление, связанноесналожениемпространственной волны на поверхностную при дальностях более 150 км, и изменение условий распространения радиоволн в течение суток, снижающих точность измерений. Для устранения многозначности измерений система усложняется, при этом используют паузы между импульсами (см. рис. 17.34)и вводятв нихдополнительныесигналы на частотах fг и fсг. Тогда сигналы ведущих и ведомыхстанций будут иметь вид, как показано на рис. 17.35.
f |
т |
fг |
f |
f |
f |
f |
сг |
Sвщ |
|
|
сг |
г |
г |
|
|
||
|
|
|
|
|
|
|
|
t |
|
|
fт |
f |
f |
fт |
|
S |
вм1 |
|
|
|
г |
сг |
|
|
|
|
|
|
|
|
|
|
|
|
t |
|
|
|
fт |
f |
f |
f |
Sвм2 |
|
|
|
|
|
г |
сг |
т |
|
|
t
Рис. 17.35. Устранение неоднозначности в фазоимпульсных РНС
Естественно, бортовой приемник принимает сигналы на всех трех частотах и измеряет соответствующие фазовые сдвиги:
• на частоте fT
|
Т1 |
|
D1 T |
|
|
и |
|
|
D2 T |
; |
|
|
||||||
|
|
|
|
c |
|
|
|
Т2 |
|
|
c |
|
|
|
|
|||
• на частоте fГ |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
Г1 |
D |
и |
|
Г2 |
D2 |
Г |
; |
|
|
(17.47) |
||||||||
|
|
1 Г |
|
|
|
|
|
|
|
|||||||||
|
|
|
c |
|
|
|||||||||||||
|
|
c |
|
|
|
|||||||||||||
• на частоте fСГ |
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
D1 СГ |
|
и |
СГ2 |
|
D2 СГ |
. |
|
|||||||
|
|
|
|
|
||||||||||||||
СГ1 |
|
|
c |
|
|
|
|
|
|
c |
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
280

Глава 17. Радиосистемы радиоуправления, извлечения и разрушения информации
Если выявить разность от разности фаз на частотах Т и Г, а также Т и СГ, то, например, для D1 получим
1 T1 Г1 |
D1 T Г |
|
, |
(17.48) |
|
|
|||||
откуда следует |
c |
|
|
||
|
|
|
|
||
D1 c Т1 Г1 |
Т Г |
|
(17.49) |
||
Следовательно, разность разности фазовых сдвигов эквивалентна измерению фазового сдвига на разностных частотах fТ – fГ и fТ – fСГ. Так как все три частоты находятся в одном диапазоне, например fТ =100 кГц, fГ=110 кГц и fСГ=101 кГц, и распространяются в одинаковых условиях, то используются как бы разностные колебания на частотах 10 и 1кГц. Естественно, чем меньше разностная частота, темменьшеточность, унасв 10и 100раз, норасширяется зона однозначных измерений в 10и 100раз. Врезультатеполучаютсятри шкалы, и если идти от сверхгрубой к точной, то последовательно сужается область однозначности с сохранением результирующей точности. Вприведенномпримереобластьоднозначности составляетболее300 км.
Безусловно, появление трех каналов вместо одного увеличивает объем аппаратуры. Имеется возможность, используя импульсный характер сигналов, разделить поверхностные и отраженные радиоволны. Однакозаэтоприходитсярасплачиватьсярасширениемполосычастот, занимаемой системой и, устраняяпомехи отдругихрадиосистем, на порядок усложнять аппаратуру.
17.2.4. Доплеровские измерители скорости и угла сноса
Доплеровские измерители скорости и угла сноса (ДИСС) относятсякклассуавтономныхрадионавигационныхсистем. Такиепредставители этого класса, как РЛС, высотомеры (импульсные и с частотной модуляцией) ранее уже были рассмотрены. Поэтому остановимся на автономном измерителе скорости и угла сноса, работа которого основана на эффекте доплеровского смещения частоты. Измерение горизонтальной скорости vГ и угла сноса УС с устранением
281
ЗАСТЕЛА М.Ю. Основы радиоэлектроники и связи
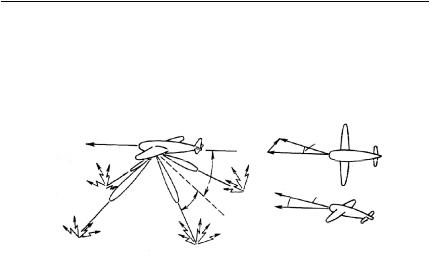
влияния угла тангажа , вертикальной составляющей vВ, крена и наклона подстилающей поверхности достигается использованием непрерывных и импульсных сигналов, трех- и четырехлучевых антенных систем, гиростабилизированных антенн, а также раздельного определения доплеровских частот в многолучевых системах. На рис. 17.36 представлена ДИСС с четырьмя лучами.
vВ |
|
v |
vГ У.С. |
|
|
вет |
|
РВ |
Л2 |
Л |
v |
2 |
3 |
С |
|
ТО2 |
Л1 Л4 |
РВ3 ТО3 |
Ось |
|
|||
РВ1 |
РВ4 |
|
vГ |
|
|
||
ТО1 |
ТО4 |
|
Рис. 17.36. ДИСС с четырьмя лучами
На данном рисунке Л1 – Л4 – диаграммы направленности четырехлучевой антенны, расположены под углами в горизонтальной ив вертикальной плоскостях от оси самолета, находящейся в горизонтальномположении. РадиосигналыРВ, излучаемыебортовымпередатчиком через четырехлучевую антенну, достигают земную поверхность в участках ТО1 – ТО4. При диффузном отражении часть энергии от облучаемых участков возвращается обратно. При движении самолета с горизонтальной скоростью vГ частота принимаемого отраженного сигнала в каждом луче отличается от частоты излучаемого сигнала на доплеровский сдвиг частоты. Для лучей Л1 и Л3
f |
|
|
2fS0 |
v |
cos cos ; |
f |
|
|
2fS0 |
v cos cos . (17.50) |
|||||
|
|
|
|||||||||||||
|
Д1 |
|
c |
Г |
|
|
|
|
|
|
Д3 |
|
c |
Г |
|
Аналогична запись fД2 и fД4 для лучей Л2 и Л4. |
|
||||||||||||||
Разность частот сигналов, отраженных от участков ТО1 |
и ТО3: |
||||||||||||||
|
|
|
|
|
f |
|
f |
|
|
4fS0 |
cos cos v . |
(17.51) |
|||
|
|
|
|
|
|
|
c |
||||||||
|
|
|
|
|
|
Д1 |
|
Д3 |
|
|
|
Г |
|
||
282

Глава 17. Радиосистемы радиоуправления, извлечения и разрушения информации
Такую же запись можно сделать и для fД2 fД4 в ДИСС пос-
лепредварительной селекции и усиления. Так как значения , , fS0 и с известны, то можно определить горизонтальную скорость vГ:
vГ |
c fД1 |
fД3 |
|
. |
(17.52) |
|
4 fS0 cos cos |
||||||
|
|
|||||
Реально режим полета самолета более сложный. В горизонтальной плоскости направление движения самолета отличается от направления его продольной оси на угол сноса (УС), причиной которого является боковой ветер. В вертикальной плоскости может наблюдаться движение с вертикальной скоростью vВ. Даже при горизонтальном движении ось самолета отличается от горизонтального направления на угол тангажа – при горизонтальном полете нос самолета несколько задран. С учетом вертикальной составляющей скорости vВ и углов сноса УС и тангажа выражениепринимает более сложный вид:
|
2f |
S0 |
|
|
1 |
sin2 cos УС vB |
|
|
||
fД1 fД3 |
|
|
|
vГ |
cos |
|
sin |
; |
||
c |
|
|||||||||
|
|
|
|
2 |
|
|
|
|||
|
2f |
S0 |
|
|
1 |
sin2 cos УС vB |
|
|
||
fД1 fД3 |
|
|
|
vГ |
cos |
|
sin |
. (17.53) |
||
c |
|
|||||||||
|
|
|
|
2 |
|
|
|
|||
Значения угла тангажа и вертикальной скорости можно определитьнерадиотехническимиметодами.Послеэтогоизвыражения(17.53) можно определить горизонтальную скорость vГ и угол сноса УС. Безусловно, эти операции реализуются с помощью специализированного вычислителя.
Отметим, что погрешности в определении скорости и угла сноса связаны сизменением характера подстилающей поверхности, воздействием внешних помех и нестабильностью аппаратуры. Как правило, они лежат в пределах (0,1 – 0,3)% для скорости и (0,1 – 0,3)% для угла сноса. Однаконеобходимо помнить, чтопри использовании счисления координат самолета, интегрируя скорость, погрешности вовремени накапливаются.
283

ЗАСТЕЛА М.Ю. Основы радиоэлектроники и связи
17.2.5. Радионавигационные системы, использующие искусственные спутники Земли
Развитие космической техники позволило создать глобальные РНС на новых принципах. Появиласьпринципиальная возможность отказаться от поверхностных радиоволн: искусственные спутники Земли можно рассматривать как движущиеся РНТ, положение которых известно в любой момент с высокой точностью.
В декабре 1976 г. было принято Постановление о развертывании Единой космической навигационной системы ГЛОНАСС (ГЛОбальная НАвигационная Спутниковая Система). Это постановление по сути лишь узаконило уже начавшиеся работы по созданию новой системы и определило порядок ее разработки и испытаний. Система ГЛОНАСС представляет второе поколение отечественных спутниковых навигационных систем. Создание этой навигационной системы было предопределено потребностями новых потенциальных потребителей, нуждавшихся в высокоточной привязке своего положения во времени и пространстве. В качестветаких потребителей выступали авиация, морской флот, наземные транспортные средства, космические аппараты, а также специальные боевые комплексы (в частности, мобильные МБР средней и большой дальности). Широкое внимание к спутниковой навигации привлекла успешная эксплуатация низкоорбитальных навигационных спутниковых систем морскими потребителями. В 1976 г. в СССР на вооружениебыла принята нави- гационно-связная система «Циклон-Б»в составе шести космических аппаратов «Парус», обращающихся на околополярных орбитах высотой 1000 км. Через три года была сдана в эксплуатацию спутниковая радионавигационная система (СРНС) «Цикада» в составе четырех КАна орбитахтогожекласса, чтои уКА«Парус». Иесли первая система использовалась исключительно в интересах МО СССР, то вторая предназначалась, главнымобразом, для навигации гражданских морских судов. Оснащениеспутниковой навигационной аппаратурой судов торгового флота оказалось очень выгодным, поскольку благодаря повышению точности судовождения удавалось настолько
284

Глава 17. Радиосистемы радиоуправления, извлечения и разрушения информации
сэкономить время плавания и топливо, что бортовая аппаратура потребителя окупила себя послепервогоже года эксплуатации. В ходе испытаний этих и предшествовавшей им системы «Циклон» было установлено, что погрешность местоопределения движущегося судна по навигационным сигналам этих спутников составляет 250...
300 м. Выяснилось также, что основной вклад в погрешность навигационных определений вносят погрешности передаваемых спутникам собственных эфемерид, которые рассчитываются и закладываются на борт КА средствами наземного комплекса управления (НКУ). С целью повышения точности определения и прогнозирования параметров орбит навигационных спутников была отработана специальнаясхемапроведенияизмеренийпараметроворбитсредствами НКУ, разработаны более точные методики прогнозирования. Для выявления локальных особенностей гравитационного поля Земли, оказывающихвоздействиена выбранныеорбитынавигационныхКА (НКА), на такие же орбиты были запущены специальные геодезические спутники «Космос-842» и «Космос-911». Комплекс принятых мер позволил уточнить координаты измерительных средств и вычислить параметры согласующей модели гравитационного поля, предназначенной специально для определения и прогнозирования параметров движения НКА. В результате точность передаваемых в составе навигационного сигнала собственных эфемерид была повышена практически на порядок, так что их погрешность на интервале суточного прогноза не превышала 70...80 м. Как следствие, погрешность определения морскими судами своего местоположения уменьшилась до 80... 100 м.
Однако выполнить требования всех потенциальных классов новых потребителей низкоорбитальные системы не могли в силу принципов, заложенных в основу их построения. Так, если для неподвижных потребителей, имеющих двухканальную приемную аппаратуру, погрешность определения местоположения удалось снизить до 32 м (данныедляамериканскойСРНС«Транзит»),топридвижении погрешности сразуженачинаютвозрастать из-за неточности счисления пути – низкоорбитальныеСРНСнепозволялиопределятьскоростьдвижения.
285

ЗАСТЕЛА М.Ю. Основы радиоэлектроники и связи
Более того, по получаемым измерениям можно определить только две пространственные координаты. Вторым недостатком низкоорбитальных систем было отсутствие глобальности покрытия, поскольку, например, на экватореспутники проходили череззонувидимости потребителя в среднем через 1,5 часа, чтодопускает проведение толькодискретных навигационных сеансов. Наконец, ввиду использования в сеансе лишь одного НКА продолжительность измерений может доходить до 10 ... 16 мин. Большая длительность сеансов и значительные интервалымеждунимиделаютнеизбежнымприменениеспециальных мероприятий для счисления пути. При этом ошибки счисления ограничивают точность местоопределения. Тем не менее была испытана самолетнаяаппаратураприменительноксигналамкаксистемы«Транзит», так и системы «Цикада». При этом подтвердилось, что погрешность определения местоположения слабо зависит от маневров самолета и действительно определяется преимущественно погрешностями знания путевой скорости, невыходя за пределы 1,8 км.
СРНС второго поколения изначальнопроектировались как системы, которые свободны от перечисленных недостатков. Главным требованием при проектировании было обеспечение потребителю в любой момент времени возможности определения трех пространственных координат, вектора скорости и точноговремени, чтодостигаетсяпри одновременномприемесигналов от какминимум четырех НКА. В конечном итоге, этопривело к реализации важной технической идеи – координации пространственного положения НКА на орбитах и координации по времени излучаемых спутниками сигналов. КоординациядвижениявсехНКАпридаетсистемесетевыесвойства, которых она лишается при отсутствии коррекции положения НКА.
Вкачествеорбитдляновойсистемыпервоначальнобыливыбраны средневысокие (20 000км) полусуточные орбиты, которые обеспечивали оптимальноесоотношение между количеством КАв системе и величиной зоны радиообзора. Однако впоследствии высота рабочей орбитыбыла уменьшенадо19100км. Этобылосделаноисходя из того, чтодляКА, имеющих период обращения, равный половине суток, проявляется резонансный эффект влияния определенных гар-
286

Глава 17. Радиосистемы радиоуправления, извлечения и разрушения информации
моник геопотенциала, приводящий к достаточно быстрому «разрушению» заданного относительного положения НКА и конфигурации системы в целом. Очевидно, что в этом случае для поддержания системы пришлось бы чаще проводить коррекции орбиты каждого КА. При выбранной высоте орбиты для гарантированной видимости потребителем не менее четырех спутников их количество в системе должно составлять 18, однако оно было увеличено до 24 с целью повышения точности определения собственных координати скорости потребителя путем предоставления емувозможности выбора из числа видимых спутников четверки, обеспечивающей наивысшую точность. Следует отметить, что в настоящее время это требование потеряло актуальность, поскольку современная стандартная навигационная аппаратура потребителя (НАП) имеет возможность принимать сигналы от 8 до 12 НКА в зоне радиовидимости одновременно, чтопозволяетнезаботитьсяовыбореоптимальной четверки, а просто обрабатывать все принимаемые измерения.
Одной из главных проблем создания СРНС, обеспечивающей беззапросныенавигационныеопределенияодновременнопонескольким спутникам, является проблема взаимной синхронизации спутниковых шкал времени с точностью до миллиардных долей секунды (наносекунд, нс), поскольку рассинхронизация излучаемых спутниками навигационных сигналов всего в 10 нс вызывает дополнительнуюпогрешностьв определении местоположенияпотребителядо10...
...15 м. Для решения задачи высокоточной синхронизации бортовых шкалвремени потребоваласьустановка наспутникахвысокостабильных цезиевыхстандартов частотыи наземноговодородногостандарта(напорядокболеестабильного),а такжесозданияназемныхсредств сличения шкал с погрешностью 3...5 нс.
Принципыпостроения спутниковыхрадионавигационныхсистем
В составе современной спутниковой радионавигационной системы (СРНС) типа ГЛОНАСС и GPS функционируют три основные подсистемы космических аппаратов (ПКА): состоящая из навигаци-
287