

ЗАСТЕЛА М.Ю. Основы радиоэлектроники и связи
и импульсы постоянной амплитуды от неподвижных целей. Затем сигнал поступает на схему вычитания по двум путям – напрямую и через линию задержки со временем задержки, равным периоду следования зондирующих импульсов. Сигналы от неподвижных целей имеют постоянную амплитуду одной полярности и взаимно компенсируются, а модулированные по амплитуде разнополярные импульсы от подвижной цели остаются в видеразности двух соседних отраженных сигналов.
Как уже было сказано, у когерентно-импульсных РЛС с СДЦ частота биения связана с доплеровской частотой неоднозначно. Частота биений и частота Доплера связаны однозначно в случае, если fД < fСЛ/2. Если же fД > fСЛ/2, то можно выделить только огибающую модуляции, импульсов, частота которых fб < fД.
Если же fД =k fСЛ, k = 1,2,…, т.е. доплеровская частота кратна частотеследования зондирующихимпульсов, томодуляции биений не будет. Возникает явление, аналогичное строб-эффекту, когда при кратности оборотов колеса числу кадров в кинопроекторе вращающееся колесо воспринимается как неподвижное. Такие скорости целей называют «слепыми». Для устранения этого явления осуществляют скачкообразное изменение частоты следования зондирующих импульсов.
Обратим внимание на особенность использования РЛС с СДЦ на самолетах. В этом случаеподвижны все цели и более эффективно использование импульсно-доплеровских РЛС.
В импульсно-доплеровских РЛС используется когерентно-им- пульсныйсигналсбольшой частотойпосылки зондирующихимпульсов, достигающей величины в сотни килогерц. При таком малом периоде ТСЛ нарушается условие однозначности измерения дальности, однако доплеровская частота определяется однозначно. Зондирующий сигнал по своим свойствам подобен непрерывному и его называют «квазинепрерывным».
Рассмотримслучай установкиимпульсно-доплеровской РЛС на самолете. Цель движется между самолетом и земной поверхностью, отражение от которой затрудняет наблюдение за целью (рис. 17.18).
238

Глава 17. Радиосистемы радиоуправления, извлечения и разрушения информации
c 0
|
|
|
|
|
|
|
ц |
|
|
|
|
|
|
vц |
|
|
|
|
Элемент земной |
|
|
|
|
поверхности |
|
|
а |
|
|
1) |
|
|
|
f |
|
FS0 |
|
|
fДmax |
|
|
|
|
fДЦ |
2) |
|
|
|
f |
f |
– F |
f |
S0 |
fS0 + Fс |
S0 |
сл |
|
|
|
|
|
|
|
2/ТИ |
3) |
|
|
|
f |
fДmax
fДЦ
4)
f
fДЦ
Fсл
б
Рис. 17.18. Принцип действия импульсно-доплеровской РЛС: а – пространственное расположение; б – спектры сигналов и помех
Зондирующий сигнал условно считаем непрерывным гармоническим колебанием. Сигнал, отраженный от земной поверхности (рис. 17.18, а), имеет доплеровское смещение по частоте, значение
239

ЗАСТЕЛА М.Ю. Основы радиоэлектроники и связи
которого определяется скоростью самолета и ориентацией рассматриваемого элемента земной поверхности:
|
2vc |
|
|
|
fД |
cos , |
(17.13) |
||
S |
||||
|
|
|
где – угол между вектором скорости самолета vс и элементом земной поверхности.
Отраженные от Земли сигналы принимаются всеми элементами диаграммы направленности, включая боковые лепестки. Максимум доплеровскогосмещения частота достигает при = 0 и . Следовательно:
f |
2vc |
. |
(17.14) |
Дmax S
Спектр сигнала, отраженногоот земной поверхности, занимает
полосу шириной 2fДmax с центром 1), совпадающим с частотой зон-
дирующегосигнала fS0 (рис. 17.18, б). Положим, чтоцельи РЛС дви-
жутся навстречу друг другу (соответствует максимальной взаимной скорости). Частота сигнала, отраженного от цели, определяется с помощью выражения:
2 vc vЦ |
|
|
|
||
F |
|
cos |
Ц |
. |
(17.15) |
|
|||||
ДЦ |
S |
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
Переходим к зондирующему сигналу в виде последовательности радиоимпульсов 2), имеющих линейчатый спектр (рис. 17.18, б). На рис. 17.18, б изображен результат 3) – суммарный спектр, полученный в результате суммирования отраженных сигналов при учете частоты их посылки fсл. Обратим вниманиена избыточность инфор-
мации в спектре. Достаточно использование полосы частот 4) от fS0
до fS0 Sсл (рис. 17.18, б). Это ограничение позволяет, пожертвовав
частьюэнергии отраженногосигнала,упроститьегообработкувприемнике РЛС.
240

Глава 17. Радиосистемы радиоуправления, извлечения и разрушения информации
Задачуобнаруженияиизмерениясигналовсдоплеровскимсдвигом частот можнорешать разбиением оси частот полосовыми фильтрами на участки. Очевидно, ширина полос фильтров определяет разрешение по скорости (частоте). Спектры сигнала от цели и земной поверхности разделяются полосовыми фильтрами. С помощью порогового устройства осуществляется фиксация сигнала цели в доплеровском канале.
Сигналы, соответствующие цели, пропускаются на выход временным селектором, а сигналы, время прихода которых соответствует дальности от земли, в схему обработки не попадают.
Особое место среди обзорных РЛС занимают РЛС бокового обзора. Они используютсядлякартографированияземной поверхности с движущегося летательного аппарата. Основная их особенность – высокая разрешающая способность.
Антенна формирует плоский луч с меньшим углом в горизонтальной плоскости. В результате в направлении перпендикулярном вектору скорости самолета, формируется облучаемая РЛС узкая дорожка. Сама антенна неподвижна, но перемещается самолет. В РЛС бокового обзора используют когерентные импульсы с целью повышения разрешающей способности по углу. Это достигается при использовании зависимости доплеровского смещения частоты и угловых координат.
Так как общее разрешение зависит от двух координат, то для получения высокого разрешения по дальности в поперечном движению носителя РЛС используют либо зондирующие импульсы малой длительности, либо сложные сигналы, в дальнейшем подвергающиеся сжатию.
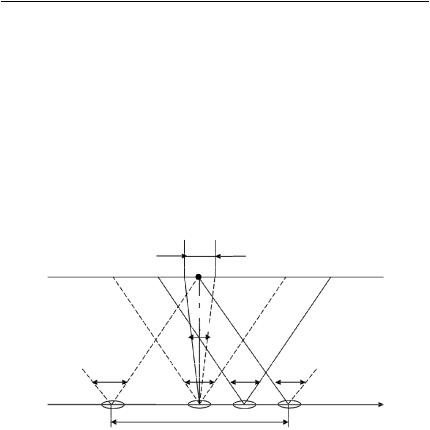
По угловой координате необходимы высокие направленные свойства. Однако она нереализуема при создании остронаправленных антенн, что связано с трудностями их размещения на летательномаппарате– существуетограничениена размер антенны. Рассмотрим принцип действия РЛС бокового обзора (рис. 17.19).
Положим, что имеется некий элемент поверхности – цель Ц. При движении РЛС относительноцели принимается, пока РЛС нахо-
241
ЗАСТЕЛА М.Ю. Основы радиоэлектроники и связи
дится в пределах участка x, на котором цель захватывается лепестком A антенны, пачка радиоимпульсов. С учетом расстояния D0 до цели можно записать:
x 2 D |
tg |
|
А |
|
D |
А |
. |
(17.16) |
|
||||||||
0 |
|
|
2 |
|
0 |
|
|
|
|
|
|
|
|
|
|
|
Угол A изображен столь большим только из соображений наглядности рисунка. Длительность приема пачки импульсов равна:
TS |
x |
D0 |
А |
, |
(17.17) |
v |
v |
|
|||
где – скорость носителя РЛС.
xсж
Ц
D0
Aсж
|
A |
D |
|
|
A |
A |
A |
||
|
x = Vt
x = D0 A
Рис. 17.19. Принцип действия РЛС бокового обзора
Цели, находящиеся на расстоянии, меньшем x, в некогерентной РЛСвоспринимаютсякакодна цель. Если в когерентнойимпульсной РЛС используетсясогласованнаяобработка принятыхсигналов, то сигналы от близко расположенных целей разделяются и повышается разрешение по координате x. Такое повышение разрешающей способности эквивалентно повышению направленности антенны, недостижимой при ограничениях на габариты антенны.
242

Глава 17. Радиосистемы радиоуправления, извлечения и разрушения информации
Согласованная обработка заключается в следующем. Радиаль-
ная скорость между целью и движущейся РЛС, равная v d |
D |
и |
||||||||
|
||||||||||
|
|
|
|
|
|
|
|
r |
dt |
|
имеющая вид |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
d |
|
|
|
|
|
v2t |
, |
|
|
v |
|
D2 |
v2t2 |
|
|
|
|
|||
|
|
|
|
|
||||||
r |
dt |
0 |
|
|
|
D02 v2t2 |
|
|
|
|
есть функция координаты x = v t. С учетом малости отрезка пути
|
x |
|
x 2 А |
D |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
0 |
радиальная скорость |
|
|
|
||||||||||||
|
|
2 |
|
|
|
|||||||||||||
|
|
|
|
|
vr |
|
|
v0 |
|
x |
v2 |
t |
(17.18) |
|||||
|
|
|
|
|
|
|
|
|||||||||||
|
|
|
|
|
|
|
D |
|
D |
|||||||||
|
|
|
|
|
|
|
|
|
|
0 |
0 |
|
|
|
||||
и соответствующая ей доплеровская частота: |
||||||||||||||||||
|
|
|
|
|
fД |
|
v |
r |
|
|
|
2 v2 x |
|
2 v2 t |
||||
|
|
|
|
|
|
|
|
|
|
|
|
(17.19) |
||||||
|
|
|
|
|
S |
|
S D0 |
|
||||||||||
|
|
|
|
|
|
|
|
|
|
|
S D0 |
|||||||
являются линейными функциями координаты x и времени t. В результате гармонический зондирующий сигнал при приеме будет иметь вид ЛЧМ-сигнала.
Ранее рассматривалось сжатие ЛЧМ-сигнала. Пачку когерентныхимпульсов такжеможнорассматриватькакЛЧМ-сигнал, длякоторого можно создать согласованный сжимающий фильтр.
Длительность сигнала на выходе фильтра обратно пропорциональна ширине спектра ЛЧМ-сигнала и, следовательно, равна
T |
1 |
,где fД |
–девиациячастотыврезультатеэффектаДоп- |
|||||
|
||||||||
Sсж |
2 fД |
max |
|
|
|
|
|
|
|
max |
|
|
|
|
|
|
|
лера. Учитывая, что |
fДmax |
|
fД t |
|
при t TS |
, а также выражения |
||
|
|
|||||||
(17.16) и (17.18), запишем: |
|
|
|
2 |
|
|||
|
|
|
|
|
||||
243

ЗАСТЕЛА М.Ю. Основы радиоэлектроники и связи
T |
S |
|
, |
|
(17.20) |
Sсж |
2 v А |
|
|||
так как за TSсж РЛС перемещается на величину |
|
||||
xсж v TSсж |
S |
. |
(17.21) |
||
2 А |
|
||||
Линейное разрешение когерентной РЛС вдоль линии ее движения определяется длиной пройденного отрезка в пределах принятия
сигналаотцели x |
сж |
x.Учтем,что |
А |
|
S |
,ивыражение(11.25): |
|||
|
|||||||||
|
|
|
|
|
|
dА |
|||
|
|
x |
|
dА |
. |
|
|
(17.22) |
|
|
|
|
|
|
|||||
|
|
сж |
2 |
|
|
|
|
|
|
Линейное разрешение не зависит от дальности до цели (элемента разрешения), длины волны и равнополовине длины раскрыва
антенны, установленной на летательном аппарате dА .
2
Положив, что реальная система является сжимающим фильтром, рассмотрим, какая же воображаемая антенна обеспечит разре-
шение xсж . У такой антенны ширина ДН
|
Acж |
|
xсж |
|
|
|
S |
|
|
, |
(17.23) |
||
|
|
D |
|
|
|
2 |
А |
D |
|
||||
|
|
0 |
|
|
|
|
|
0 |
|
|
|||
отсюда ее раскрыв |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Acж |
|
S |
|
. |
|
(17.24) |
|||
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
2 dАсж |
|
||||||
Можно сделать вывод, что кажущийся раскрыв антенны равен отрезку пути, на котором принимаются отраженные сигналы от точечной цели Ц:
Acж А D0 x. |
(17.25) |
244

Глава 17. Радиосистемы радиоуправления, извлечения и разрушения информации
Этот кажущийся раскрыв называют синтезированным, а коге- рентно-импульсную РЛС бокового обзора – РЛС с синтезированным раскрывом антенны.
Во многих типах РЛС имеется необходимость перемещать ДН антенн. Нарядус механическими методами управлениялучом антенны, достаточнопростыми в реализации, нообладающими инерционностью и требующими поворота антенны, развиваются и электронныеметоды. В их основележит использование фазированных антенных решеток (ФАР).
ФАР представляет собой конструкцию, состоящую из большого числа однотипных излучающих элементов. Это могут быть полуволновые вибраторы, щелевыеизлучатели, рупоры, открытые концы волноводов. Решетки могут быть одно- и двухкоординатными. Наибольшее применение нашли двухкоординатные решетки, позволяющиеформировать остронаправленныедиаграммы и управлять ими в двухплоскостях.Отметим, чтов зависимости отрежима работыРЛС, ФАР позволяют менять и форму диаграмм, и их количество. Число элементарных излучателей в двухкоординатных ФАР достигает тысяч единиц. Раздельным управлением амплитудой и фазой в каждом элементе ФАР можно изменять положение фазового фронта всей решетки. Если все элементы решетки возбудить синфазно, то фазовый фронт параллелен плоскости решетки, а ДН перпендикулярна фазовому фронту. Меняя величины фазовых сдвигов в соседних элементах решетки, меняем и положениеглавного лепестка ДН относительно плоскости решетки.
Управление фазовым сдвигом можно осуществлять частотным и фазовымметодами. Наиболееинтересен вариантсактивными ФАР, в которых каждый элемент ФАР является отдельным передатчиком, а в системуих объединяетобщееуправлениекак поизлучаемым сигналам, так и по фазовым сдвигам. После когерентного сложения в пространствесигналовканальныхпередатчиков можнополучитьсигнал большой мощности при ограничении на мощность отдельного канала. Крометого, РЛС, оснащенные ФАР, выполненными потакой схеме, обладают высоким уровнем надежности. Недостатком являет-
245

ЗАСТЕЛА М.Ю. Основы радиоэлектроники и связи
ся сложность антенн на основеФАР посравнению с использованием классических (например, параболических) антенн.
Ярким примером объединения многих достижений являются РЛС для загоризонтной радиолокации. В основе создания таких РЛС лежит внесенное в реестр открытий СССР № 1 с приоритетом от 15 марта 1947 года открытие Н.И. Кабанова. Его формулировка звучит так «Сверхдальнее КВ-рассеивание радиоволн земной поверхностью».
Вгл. 11 ужерассматривался характер распространения радиоволн различныхдиапазонов. Короткиеволныспособны«перекрыть» всю земную поверхность за счет многократногоотражения от ионосферы и Земли. КВ-рассеивание происходит во всех направлениях и, следовательно, часть первоначально излученной электромагнитной энергии возвращается в точку излучения. При этом отраженный сигнал несет информацию о радиолокационных целях. Основная проблема заключается в обработке принятых сигналов, которая невозможна безвысокоскоростныхвычислительныхсистем. Используются достижения и в теории сложных сигналов, доплеровской се-
лекции целей.
Например, РЛС, размещеннаяв Туле(Гренландия), имеетвысотудесятиэтажногодома, содержитдва рабочих полотна ФАР, каждое из которых перекрывает сектор в 120 градусов и состоит из 2 560 активных и 1 024 пассивных элементов (прием и передача). Дальности обнаружения целей превышают три тысячи километров, но это далеконепредел. Активныеэлементы обеспечиваютмощности в сотни ватт, выполнены на полупроводниковых элементах. Наработка на отказпревышает100000часов. Уязвимостьспутниковыхсистемслежения делает загоризонтные локаторы необходимой составляющей системы обороны развитых стран.
17.1.4.Радиолокационные станции следящего типа
Вряде практически важных случаев необходимо измерение координат цели с повышенной точностью с непрерывной выдачей информации об их значениях. Такие задачи решаются с помощью РЛС
246

Глава 17. Радиосистемы радиоуправления, извлечения и разрушения информации
следящего типа, которые осуществляют слежения за угловыми координатами целей, ихдальностью, а такжерадиальной скоростью. При использовании импульсно-доплеровскихРЛС возможноодновременное слежение за всеми параметрами, характеризующими цель.
Слежениеза координатами, внезависимости отихвида, осуществляется с помощью замкнутой системы автоматического управления – следящей системы (рис. 17.20).
|
|
Устройство |
Cy |
|
Дискриминатор |
управления |
|
|
|
|
ˆ
Исполнительное
устройство
Рис. 17.20. Замкнутая следящая система
В дискриминаторе осуществляется сравнение текущего значе-
ния измеряемого параметра с оценкой ˆ , полученной при преды-
дущемизмерении, и выработка сигнала рассогласования ˆ . В устройстве управления осуществляется интегрирование рассогласования. Так как сигнал на выходе устройства управления должен соответствовать значению измеряемой координаты, осуществляется запоминание с помощью интеграторов. Исполнительное устройство преобразует сигнал управления в физическую величину, являющуюся оценкой измеряемой координаты.
Рассмотрим амплитудный моноимпульсный суммарно-разно- стный следящий измеритель направления. Так как слежение и измерение угловых координат в азимутальной и угломестной плоскостях осуществляется идентичными устройствами, ограничимся только азимутальной плоскостью.
В амплитудном моноимпульсном следящем измерителе для измерения угловой координаты используется метод сравнения (равно-
247