

ЗАСТЕЛА М.Ю. Основы радиоэлектроники и связи
сти объекта управления. Для решения задач управления необходимо установить взаимосвязь «подвижной» системы координат с неподвижной земной системой. Проекции осей XC, YC, ZC на плоскости XЗOY, YЗOZЗ, XЗOZЗ образуют с осями XЗ, YЗ, ZЗ три угла: угол тангажа , угол крена и курсовой угол (см. рис. 17.39) последний
не показан, но смысл его понятен). Проекции вектора скорости V , определяющего траекторию движения объекта управления, образуютсосямиземнойсистемыкоординатв вертикальной плоскостиугол наклона траектории и в горизонтальной плоскости –путевой угол .
Углы между траекториями V и проекциями осей ЛА на те же плоскости определяют угол атаки C = – и угол скольжения C = – Ф (возникает при боковом сносе, например от ветра).
При отсутствии воздействия автопилота движение объекта управленияописываетсясистемой дифференциальныхуравнений,имеющих в векторной форме вид
dV |
|
|
|
|
|
dK |
|
|
|
|
|
|
|||||||
m |
|
|
V |
|
R, |
|
M , |
(17.60) |
|
|
|
||||||||
dt |
|
|
|
|
|
dt |
|
|
|
|
|
|
|
|
|||||
где V(x, y, z) – вектор скорости движения центра масс; R(x, y, z) – вектор внешних сил;
M(x, y, z) – главный момент внешних сил; K(x, y, z) – кинематический момент системы;
– вектор угловой скорости объекта управления.
Решая систему (17.60), можнонайти взаимосвязь междувходными координатами h, Z, L и отклоняющими рулями объекта (в широком смысле). Эти решения очень сложны, движение объекта приходится представлять в виде совокупности простых уравнений, осуществлять линеаризацию и делать ряд допущений. Результатом является структурная схема объекта управления, позволяющая выявить требования к специфическим особенностям объекта управления, например, к необходимости стабилизации крена для сохранения управления в вертикальной и горизонтальной плоскостях.
308
Глава 17. Радиосистемы радиоуправления, извлечения и разрушения информации
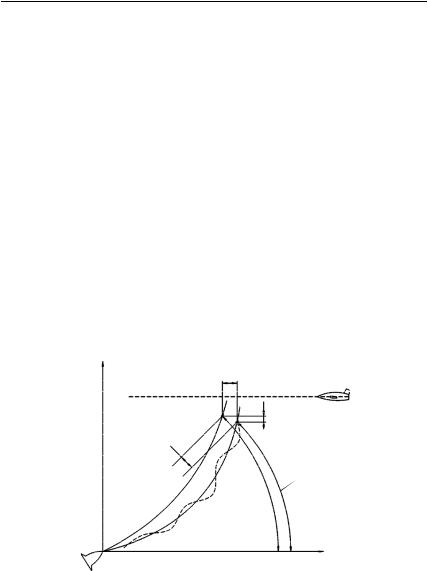
Автоматическоенаведениеобъекта управления на цель осуществляется непрерывным измерением текущих координат цели ц(x, y, z) и объекта управления Р(x, y, z). Если рассматривать систему наведения как систему автоматического регулирования (см. рис. 17.41), мгновенная разница координат цели и ракеты (t) = вх (t) – вых(t) образует сигнал рассогласования, который используется для управления движением ракеты таким образом, чтобы свести рассогласование до нуля и обеспечить наибольшую вероятность поражения цели ракетой. Закон образования сигнала рассогласования зависит от метода наведения или способа задания кинематической траектории, по которой происходит сближение объекта с целью. Кинематической траекторией (КТ) ракеты называется путь ее движения до встречи с целью, при котором ракета, цель и пункт управления представлены в видегеометрических точек, размещенных в их центрах масс. Реальное движение ракеты происходит по динамической (ДТ) и фактической (ФТ) траектории, учитывающей инерционность ракеты, свойства системы управления, внешние возмущения и помехи (рис. 17.42).
h
l Цель
l
ДТ
вых(t)
ФТ
КТ вх(t)
l
Рис. 17.42. Траектория движения ракеты
309
ЗАСТЕЛА М.Ю. Основы радиоэлектроники и связи
Траекторию движения объекта управления целесообразно разбить на три участка: выведение на траекторию наведения, движение потраектории наведения, движениек цели после прекращения рабо- тысистемыуправления(старт–сближение–попаданиев цель). Участокдвиженияпотраектории наведенияможетбытьфиксированным и подвижным (жестким и гибким). Жесткая траектория задается заранее и используется для наведения в неподвижную цель. В случае подвижной цели (может также быть подвижным и пункт управления) используется гибкая траектория.
Гибкую траекторию можно создать трехточечным методом. Он заключается в удержании в течение всего времени полета ракеты на линии, соединяющий пункт управления и цель. С помощью трехточечного метода можно осуществлять наведение ракеты в упрежденную точку. В случае, когда невозможно участие пункта управления к коррекции траектории, используется двухточечный метод. В нем участвуют только ракета и цель. В нем также возможно наведение в упрежденную точку, причем в нескольких вариантах:метод постоянного упреждения, методы параллельногои пропорциональногосближения.
Суть метода постоянного упреждения заключается в сохранении постоянным значения угла между линией визирования (линия ракета-цель) и вектором путевой скорости ракеты. Частным случаем является нулевой угол упреждения. Этот метод называется наведением по кривой погони. На рис. 17.43 изображены траектории наведения по кривой погони и параллельном сближении.
|
|
|
|
y = Vy t |
y = Vy t |
|
|
|
||
5 |
4 |
3 |
2 |
1 0 |
|
Цель |
1 2 |
3 |
4 |
5 |
|
0 |
|||||||||
Линия визирования |
2 |
3 |
|
Линия |
|
|
4 |
|
||
|
|
|
|
3 |
|
|||||
|
|
визирования |
|
|
|
|||||
p = Vp t |
1 |
|
|
Ф = |
Vp |
t |
2 |
|
Ф |
|
|
|
|
1 |
|
|
|
||||
|
|
|
|
x3 |
|
|
|
|||
|
0 |
|
|
|
0 |
|
|
|
x3 |
|
|
а |
|
|
|
|
|
б |
|
|
|
Рис. 17.43. Траектории наведения: а – кривая погони; б – параллельное сближение
310

Глава 17. Радиосистемы радиоуправления, извлечения и разрушения информации
На рис.17.43, апоказана траекториякривой погони при наведении на цель, движущуюся навстречу. Из рисунка видно, что траектория движения ракеты сильноискривлена, причем кривизна при приближении ракеты к цели сильно возрастает, на этом участке ракета может оказаться неспособной к столь крутому повороту и сойти с кинематической траектории движения. При параллельном сближении (рис. 17.43, б) линиявизирования всевремяостается параллельной самой себе. Этот метод характеризуется минимальными маневрами ракеты и, следовательно, нет опасности схода ракеты с траектории движения.
Наиболее общим методом наведения является метод пропорционального сближения, при котором отношение угловой скорости ракеты к угловой скорости линии визирования постоянно: в аналитическом виде метод описывается уравнением:
dФ |
A |
d |
, |
(17.61) |
dt |
|
|||
|
dt |
|
||
приводящим при интегрировании к виду
Ф A |
|
, |
(17.62) |
|
|
0 |
|
где Ф – путевой угол ракеты;
и 0 – угол и начальный угол визирования цели;
А– постоянная.
Уравнение (17.61) достаточно универсально. Если положить
А= 1; 0 0, то получаем наведение с постоянным углом упреждения; при А = 1; = 0 – наведение по кривой погони; при = 0 или
А= – наведение по методу параллельного сближения. Методы параллельногои пропорциональногосближенияпри реализациитребуют измерений угловой скорости линии визирования , а технически это намного более сложная задача, чем измерение угла визирования при наведении по кривой погони.
Для построения кинематических траекторий для различных методов наведения необходимо решить ряд дифференциальных и тригонометрических уравнений. Результатом решения является уп-
311

ЗАСТЕЛА М.Ю. Основы радиоэлектроники и связи
равляющаяфункция вх(t)или закон отклонениякинематической траектории от линии визирования в момент старта ракеты. Управляющая функция определяет маневры ракеты в процессе наведения и раcсчитывается либо в угловых, либо в линейных величинах в зависимости отвыбранногометода управления ракетой. При использовании трехточечногометода (управлениев лучеили покомандам)предпочтительно рассчитать функцию вх(t) в виде линейного перемещенияракетыотносительнолиниивизированияцелисточкиуправления. В результате получаем уравнение:
t |
|
вх угл dt , |
(17.63) |
0 |
|
где – угловая скорость движения луча, следящего за целью.
Для двухточечных методов управляющая функция имеет сложную форму, решениедля кривой погони получается в неявном видеи управляющая функция вх = r(t) выражается в виде степенного ряда, позволяющего приближенно описать управляющую функцию для ограниченного интервала времени.
Конечный результат – зависимость вх(t) – представляют в виде таблицилиграфиков.Длярасчетов вх(t)апроксимируетсяввидесмешанных рядов.
При выборе системы наведения центральным вопросом является определение наилучшей траектории движения ракеты. Она должна обладать минимальной протяженностью и кривизной, так как в этом случае снижаются требования к двигателю и конструкции ракеты.
Для системы наведения рассчитываются динамические ошибки наведения с учетом всего комплекса наведения и объекта управления – ракеты. При этом оптимизируют методы управления ракетой. Отметим, что необходимость записи функции передачи контура управления делает это выражение сложным даже в случае линейных характеристик элементов, входящих в него. Исследование устойчивости системы управления проводится также, как системы с обрат-
312

Глава 17. Радиосистемы радиоуправления, извлечения и разрушения информации
ной связью. Как говорилось ранее, основным уравнением системы наведения является выражение:
вх (t) вых (t), |
(17.64) |
где – ошибка управления (см. рис. 17.42).
При управлении ракетой ее кинематическая траектория изменяется и должна вычисляться заново, исходя из движения по динамической траектории. Кроме динамической ошибки имеют место ошибки, вызванные внешними воздействиями. Система управления характеризуетсясуммарнойошибкойивероятностьюпораженияцели. Более просто использовать понятие «промах», под которым понимают минимальноерасстояниемеждуцелью и ракетой в момент пролета ракеты вблизи цели rпр.
Вконечном счете можно подсчитать вероятность поражения цели, учитывая размеры, эффективность боевого заряда ракеты и закон распределения ошибок.
17.3.2.Описание систем управления
Всистемах управления ракетами для определения параметров движения как самих ракет, так и цели, используются разнообразные типыизмерителей(радиотехнические, оптические,гироскопические, инерциальные и т.д.), являющиеся в совокупности функциональными преобразователями и специализированными вычислителями-ко- ординаторами, сигналы которых – команды на управлениеракетами.
По признакам места установки координаторов (управляемый объектили пунктуправления)и взаимосвязяммеждуобъектомипунктом управления выделяют четыре основных типа систем управления: автономное, радиотеленаведение, радиотелеуправление и самонаведение.
Системыавтономногоуправления–этоспособуправленияпод- вижным объектом по программе, задающей необходимую траекторию движения. Все отклонения от траектории определяются с помощьюсредств, находящихсяна подвижномобъектеинеимеющихконтакта с целью и каким-либо пунктом управления. В число бортовых
313

ЗАСТЕЛА М.Ю. Основы радиоэлектроники и связи
координаторов входят гироскопические и инерциальные координаторы. Система автономногоуправления может быть многоконтурной и содержать, например, контуры рулевогоуправления, стабилизации объекта управления относительно центра масс и управления движения центра масс в заданном направлении. Первые два контура составляют системуавтопилота, обеспечивающеговыполнениекоманд координатора, входящего в третий контур.
Измерение угловых координат объекта управления можно осуществитьспомощьюгироскопа,используясвойствосохраненияглавной осью гироскопа начального положения, при котором он был стабилизирован. В дальнейшем, используя неизменноеположение главной оси и перемещение внутренней и внешней рамок, измеряют попарно углы: тангажа и курса, тангажа и крена, курса и крена – в зависимости отспособа установки гироскопа на объектеуправления. Главная ось гироскопа подвержена медленным уходам, для коррекции которых предпринимаются специальные меры.
Часто в контур управления включают высотомеры для обеспечения полета на заданной высоте и датчики перегрузок, дающих информациюопоперечныхлинейныхперемещениях.Возможноиспользование доплеровских измерителей бокового сноса. Датчики ускорений, для сохранения ими положения в пространстве, устанавливают на гиростабилизированныеплатформы.
Основные достоинства систем управления, использующих гироскопические и инерциальные координаторы – отсутствие какихлибо связей с внешней средой, т.е. они полностью автономны.
Системы, использующие астронавигационные и доплеровские системы, тожеотносятся к классуавтономных, так как ненуждаются в связи с пунктом управления.
Основноедостоинствоавтономных систем – неограниченность зоны действия и высокая помехоустойчивость – нет возможности создать организованные помехи. Недостаток – накопление ошибки в определении координат. Проблема решается комплексированием с другими системами управления для периодического уточнения координат.
314

Глава 17. Радиосистемы радиоуправления, извлечения и разрушения информации
Как правило, автономные системы стабилизации объекта управления сочетаются с другими типами систем управления.
Системы радиотеленаведения – это способ радиоуправления с командного пункта, заключающийся в измерении на борту объекта управления бокового отклонения от создаваемой на командном пунктерадионавигационнымисистемамилинииположения(радиозоны). При радиотеленаведении объект управления наводят на неподвижную цель по фиксированной траектории, определяемой линиями положения радионавигационной системы.
В случаях, когда линия положения исходит из пункта управления и является прямой линией, бортовая часть системы теленаведения близка к структуреавтономного управления по заданному курсу. При теленаведении боковое отклонениеот линии положения измеряется радиотехническими координаторами и масштабный коэффициент между измеряемым отклонением Z и необходимым значением команды U Z зависит от дальности. Возможно, учитывая непрямолинейность линий положения, вносить поправки в сигналы управления. Система телеуправления, как правило, работает в комплексе с элементами автономной системы управления. В системах теленаведениявкачествелинииположенияиспользуютравносигнальнуюзону в радиолуче. Управление в луче позволяет осуществлять наведение по гибкой траектории на подвижную цель.
Система состоит из РЛС, находящейся в пункте управления и формирующейравносигнальнуюзону,осьсимметриикоторойнаправлена на движущуюся цель, и бортового координатора, измеряющего отклонения объекта управления от оси равносигнальной зоны. При поддержании совмещения равносигнальной оси РЛС с направлениемнацельи устранениембортовымкоординаторомотклоненийобъекта управления (ракеты) от этой оси обеспечивается попадание ракеты в цель. Как правило, кривизна траектории наведения с использованиемРЛСидлявизированияцелиисозданияравносигнальнойзоны велика. Для снижения требований к маневренности ракеты целесообразно использовать упрежденный метод наведения. Для реализа-
315

ЗАСТЕЛА М.Ю. Основы радиоэлектроники и связи
ции этого метода необходимо наличие в пункте управления РЛС визирования цели (определение ее координат), РЛС управления ракетой и специализированноговычислителя для определения направления и величины упреждения. При усложнении наземногооборудования бортовое остается простым, что существенно с точки зрения его однократного применения. Работа бортового координатора подобна работе измерительной части следящего измерителя направления с коническим сканированием луча. В бортовом координаторе формируются сигналы рассогласования по тангажу и курсу или высоте и угловому отклонению. Они поступают в автопилот, который с помощью рулей удерживает ракетуна оси равносигнальной зоны. Для работы бортового координатора на борт поступают опорные сигналы, определяющие привязку к началу отсчета X и Y. Опорные сигналы передаютсяс пункта управлениядополнительной модуляцией сигналов, измеряемых РЛС для создания равносигнальной зоны. Для правильного управления по азимуту (курсу) и углу места (тангажу) ракета стабилизируется по крену.
Особенность управления ракетой в радиолуче заключается в задании ее траектории изменением направления оси равносигнальной зоны по азимуту и углу места , так как РЛС визирования цели определяет ее угловые перемещения.
|
|
|
Z |
и |
hц |
, |
(17.65) |
|
ц |
|
D |
|
D |
|
|
|
|
|
ц |
|
ц |
|
|
где Dц – дальность до цели;
Zz и hц – перемещение цели по координате Z и по высоте. Приращениемуглов ц и ц задаетсяновоенаправлениелуча.
В результате луч в районе ракеты смещается на величины
Zp цDp и hp цDp , |
(17.66) |
где Dр – дальность до ракеты от пункта управления.
Ракета, перемещаясь в сторону нового положения луча, в соответствии с выражением (17.66) в связи с увеличением Dр должна
316

Глава 17. Радиосистемы радиоуправления, извлечения и разрушения информации
проходить большиерасстояния Zр и hр. Следовательно, померероста Dр необходимоувеличиватьинтенсивностьсигналов управления. Это достигается введением в контур управления ракетой двух интеграторов, фазоопережающего звена и устройства, увеличивающего коэффициент управления пропорционально дальности. С помощью интеграторов осуществляется запоминание текущих значений курса и тангажа.
Система наведенияс двумяРЛС обладает устойчивостьюк случайным флуктуациям сигналов от цели, их можно отфильтровать и исключить из сигналов управления лучом, задающим траекторию движения ракеты. Вблизи цели целесообразно, для повышения точности, переводить ракету в режим самонаведения. В системе необходимо учитывать помехи приему бортовой аппаратуры, создаваемые ионизацией, порождаемой работой реактивных двигателей ракеты.
Достаточно сложен начальный (стартовый) участок полета ракеты. Переход от автономного управления на наведение по лучу должен быть плавным, он возможен при входе ракеты в луч под малым углом, исключающим «проскок» ракетой луча. При очень малых углах возможен «захват» ракеты боковыми лепестками. Для предотвращения этих явлений используют специальные меры.
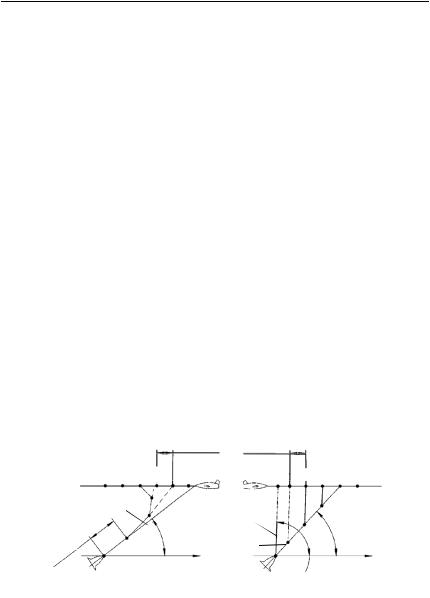
Системы командного управления реализуют способ наведения, заключающийся в подаче радиокоманд с пункта управления на ракету для удержания ее на кинематической траектории. Различают два типа командного управления. В системах типа I измерение координат цели и ракеты производится относительно пункта управления (рис.17.44,а),авсистемахтипаII–относительноракеты(рис.17.44,б), причем результаты измерений передаются с ракеты в пункт управления, где формируются команды управления. Формирование команд управления может осуществляться автоматически или оператором вручную. Особенностью систем командного управления является возможность визирования процесса наведения ракеты на цель в широком секторе пространства, окружающего цель.
Система ручного управления используется при относительно небольших расстояниях до цели и возможности визуального наблю-
317