

1.4 Выводы.
Подобные системы открывают новую эру в технологии освещения, давая возможность использовать различные функции фар и позволяя автоматически регулировать освещение к дорожной ситуации.
Последнее поколение регулируемых фар связано с использованием светодиодных ламп, которые включаются группами в зависимости от режима движения автомобиля. Данное направление является наиболее перспективным. Однако поворотные фары также остаются актуальными, пока стоимость светодиодных ламп достаточно высока.
Система автоматического управления светом является сегодня одним из важных направлений повышения комфорта и надёжности автомобильных систем. Актуальность данной тематики очевидна, поскольку в настоящее время развитие автомобильной бортовой электроники имеет колоссальные масштабы. Главной идеей такого развития является роль человека в управлении агрегатами автомобиля с целью снижения утомляемости водителя, повышения комфортабельности и безопасности.
Согласно последним данным федерального бюро статистики Российской Федерации, более 40 процентов автомобильных аварий со смертельным исходом происходят ночью, несмотря на то, что в это время суток загруженность дорог на 80 процентов меньше, чем днем. И это неудивительно. Визуально водитель воспринимает 90 процентов всей необходимой дорожной информации. Научные исследования показали, что этот показатель снижается до 4-процентного уровня в условиях плохой видимости в ночное время суток. Адаптивная система головного освещения повышает безопасность в условиях плохой видимости, особенно осенью и зимой. Таким образом, применение новых фар позволяет взгляду водителя точно следовать траектории движения автомобиля в повороте и лучше концентрировать свое внимание на дороге. Поворотные фары с автоматическим управлением улучшают освещение дороги в направлении движения почти на 50 процентов.
Очевидно, что существует острая необходимость в создании устройств подобного типа, имеющих еще большую эффективность, поэтому целью данной работы является создание микроконтроллерной системы автоматической регулировки фар.
2. Разработка алгоритма работы системы
Система управления поворота фар по вертикали активируется при включении внешнего освещения при T=l, То есть при включении ближнего/дальнего света, и автоматически выходит в режим тестирования, тестируется контроллер, а так же все датчики и нагрузка системы. При Т=0 система управления поворотом фар не активируется. Результаты тестирования передаются по CAN интерфейсу на информационное табло автомобиля для оповещения водителя. Если какое либо устройство системы неисправно, то выводится информация о неисправности системы управления поворотом фар на информационное табло, информируя водителя о возникшей неисправности, и система не активируется. Фары автомобиля будут обеспечивать освещение сопоставимое со стандартным освещением фарами автомобиля, не оборудованного поворотными фарами с автоматическим управлением.
После успешного прохождения тестирования система находится в режиме определения скорости движения автомобиля. С учетом скорости автомобиля изменяется скорость поворота фар. Первое что система определяет это точная скорость движения автомобиля. Далее точно определенные величины поступают на микроконтроллер и обрабатываются им, производится расчет угла, на который нужно повернуть прожекторы фар:
Ufg=(Upi-Uрi-1)*К.
Напомним, что прожекторы фар поворачиваются в пределах 22 градусов, при повороте внутренний прожектор. поворачивается максимум на 7·градусов, а наружный прожектор на 15·градусов. Вычисленный угол поворота фар подается в виде сигнала на электродвигатели, которые поворачивают прожекторы фар на нужный угол: A = Ufg*U. Датчики угла поворота фар, следящие на какой угол повернуты фары, передают информацию микроконтроллеру об их положении. Таким образом, реализуется обратная связь. Микроконтроллер проверяет, совпадает ли выданный им углы поворота фар с углами, на который фары повернулись и при расчете нового угла поворота прожекторов фар, ведется его корректировка с учетом угла, на который фары уже были повернуты. Если на микроконтроллер поступает информация, что угол поворота фар, который зафиксировали датчики угла поворота фар, совпадает с углом, который микроконтроллер рассчитал ранее, привод фар фиксирует их в данном положении, пока не поступят указания от микроконтроллера об изменении положения прожекторов фар и повороте их на новые угла. Непрерывно микроконтроллер ведет расчет новых углов, на которые нужно повернуть фары, ведь движение автомобиля характеризуется постоянным изменением скоростного режима и направления движения. Так же при движении на высокой скорости положение фар меняется быстрее, а при более медленном движении поворотный механизм снижает скорость поворота фар, микроконтроллер при расчете угла поворота прожекторов фар рассчитывает и скорость поворота фар. В результате световой пучок фар распределяется в соответствии с изменением "сектора обзора" водителя при маневрах на любой скорости.
Алгоритм взятый за основу работы системы, приведён на рисунке 2. Ниже приведен алгоритм описанный выше, рисунок 3.
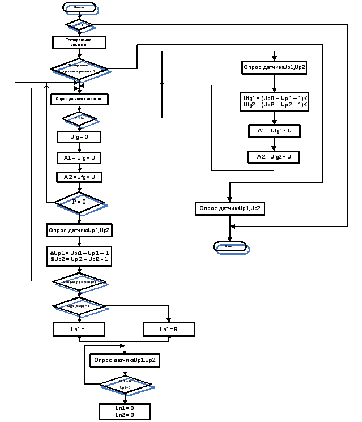
Рисунок 2 – Алгоритм работы микроконтроллерной системы автоматической регулировки фар
Алгоритмы обработки сигналов датчиков
Сигналы с датчиков проходят следующие этапы предварительной обработки:
– проверка на достоверности;
– дискретная фильтрация;
– проверка на технологические границы.
Проверка на достоверность заключатся в том, что скорость изменения сигналов с датчиков не должна превышать известные предельные значения. Данный алгоритм может быть описан следующей последовательностью действий.
1 Считывается сигнал i-ого датчика Xi(k), где k – текущий дискретный момент времени. Если выполнено условие
 , (2.1)
, (2.1)
то сигнал с датчика считается достоверным. Осуществляется переход на пункт 3 данного алгоритма.
В первый момент времени при k=1, проверка на достоверность не производится, т.к. показаний датчиков только один отчет.
2 Производится увеличение счетчика недостоверных значений сигналов датчиков
 . (2.2)
. (2.2)
Если
 ,
то выдается сообщение о неисправности
датчика и осуществляется переход на
конец алгоритма.
,
то выдается сообщение о неисправности
датчика и осуществляется переход на
конец алгоритма.
3 Сигнал датчика достоверен, поэтому приступаем к дискретной фильтрации. Алгоритм фильтрации осуществляется в соответствии с фильтром низких частот первого порядка, который описывается уравнением:
 , (2.3)
, (2.3)
где
 – постоянная времени фильтра;
– постоянная времени фильтра;
 –выход
фильтра;
–выход
фильтра;
 –вход
фильтра.
–вход
фильтра.
Так как уравнение (2.3) реализуется в ЭВМ, то его необходимо преобразовать в дискретную форму. Для этого воспользуемся методом интегрирования Эйлера, который означает кусочно-постоянную аппроксимацию интегрируемой функции. В этом случает уравнение (2.3) принимает вид:
 , (2.4)
, (2.4)
где
 – интервал дискретизации.
– интервал дискретизации.
Алгоритм
(2.4) осуществляет сглаживание высокочастотных
шумов входных сигналов. Высокочастотными
являются шумы, полоса пропускания
которых выше значения
 .
При этом для различных датчиков постоянные
времени
.
При этом для различных датчиков постоянные
времени могут быть различными.
могут быть различными.
4 Проверка на выход за технологические границы означает проверку выхода сигналов датчиков за минимально и максимально допустимые значения. Данная проверка осуществляется в соответствие с выражением
 , (2.5)
, (2.5)
 . (2.6)
. (2.6)
Если выражения (2.5), (2.6) не выполняются, то осуществляется выдача соответствующей сигнализации о выходе в недопустимые эксплуатационные режимы.
5 Конец алгоритма
Алгоритм оценивания скорости по показаниям положений
Оценивание скоростей изменения положений осуществляется в соответствии с алгоритмами, представленными в [31, 32].
В соответствие с работами [31, 32] алгоритм оценивания скорости определяется выражением
 (2.7)
(2.7)
где
 – переменные состояния наблюдателей
производных,
– переменные состояния наблюдателей
производных, ;
;
 ,
,
 – входные сигналы наблюдателей;
– входные сигналы наблюдателей;
 –параметры,
определяемые требованиями к быстродействию
и качеству подавления шумов.
–параметры,
определяемые требованиями к быстродействию
и качеству подавления шумов.
Известно, что в линейных системах увеличение быстродействия приводит к усилению шумов. В этой связи, коэффициенты усиления наблюдателя определяются выражениями [31, 32]:
 (2.8)
(2.8)
где
 – положительные постоянные параметры;
– положительные постоянные параметры;
 –положительно
определенные функции;
–положительно
определенные функции;
 –входная
величина блока наблюдателя;
–входная
величина блока наблюдателя;
 –положительный
постоянный параметр;
–положительный
постоянный параметр;
 –положительный
постоянный параметр;
–положительный
постоянный параметр;
 –первая
переменная блока наблюдателя.
–первая
переменная блока наблюдателя.
Предположим теперь, что на вход наблюдателя действует случайный сигнал, имеющий спектральную функцию
 , (2.9)
, (2.9)
где
 – дисперсия случайного шума;
– дисперсия случайного шума;
 –время
корреляции шума;
–время
корреляции шума;
 –частота.
–частота.
В этом случае, в области малых отклонений, когда величина ошибки оценивания стремится к нулю
 , (2.10)
, (2.10)
получим следующие оценки отношения дисперсий на входе и выходах блока наблюдателя (2.11), (2.12):
 , (2.11)
, (2.11)
 , (2.12)
, (2.12)
где
 – дисперсии входного и выходного
сигналов звена наблюдателя.
– дисперсии входного и выходного
сигналов звена наблюдателя.
Таким образом, параметры оценивателя скоростей определяются следующим образом.
1
Исходными данными являются: время
корреляции шума датчиков
 ,
дисперсия шума датчика
,
дисперсия шума датчика ;
требуемое соотношение между дисперсиями
входного и выходного сигналов
;
требуемое соотношение между дисперсиями
входного и выходного сигналов .
.
2
Рассчитываем коэффициенты усиления
наблюдателя. Из определения для величины
 получаем соотношение между коэффициентами
усиления нелинейного РНП
получаем соотношение между коэффициентами
усиления нелинейного РНП
 . (2.13)
. (2.13)
Для задания динамических параметров наблюдателя выбираем настройку на технический оптимум (отсутствие колебаний при максимальном быстродействии), то есть кратные корни:
 . (2.14)
. (2.14)
Приравнивая
(2.13) и (2.14), находим :
:
 . (2.15)
. (2.15)
Подставляем
(2.15) и значения времени корреляции шума
 и требуемого соотношения дисперсий
и требуемого соотношения дисперсий в формулу (2.12). В результате получаем
уравнение третьего порядка относительно
коэффициента
в формулу (2.12). В результате получаем
уравнение третьего порядка относительно
коэффициента ,
решая которое получаем три корня. Два
комплексных корня отбрасываем, а
оставшийся действительный корень всегда
положительный, определяет значение
коэффициента
,
решая которое получаем три корня. Два
комплексных корня отбрасываем, а
оставшийся действительный корень всегда
положительный, определяет значение
коэффициента .
.
Далее
из выражения (2.14) определяем значение
 .
.
3
Коэффициент
 выбирается исходя из значения дисперсии
таким образом, что если ошибка оценивания
выходной координаты превышает амплитуду
шумов, то произведение
выбирается исходя из значения дисперсии
таким образом, что если ошибка оценивания
выходной координаты превышает амплитуду
шумов, то произведение быстро нарастает, а в противном случае
– убывает.
быстро нарастает, а в противном случае
– убывает.
Пусть нелинейная функция в (2.8) выбрана в виде:
 . (2.16)
. (2.16)
Тогда
коэффициент
 рассчитывается исходя из соотношения:
рассчитывается исходя из соотношения:
 . (2.17)
. (2.17)
Коэффициент 3 появился из правила «3 сигма» – амплитуда нормального случайного шума с вероятностью 0,996 не превышает трех дисперсий этого шума.
Пусть,
например, заданы следующие исходные
данные:
 ,
, ;
; .
.
Применяя
изложенную методику, получаем следующие
значения коэффициентов нелинейного
РНП:
 ,
, .
.
Из выражения (2.17) определяется величина l:
 ,
,
Следовательно:
 .
.