

Краткий перечень основных понятий теории графов.
Теория графов как теоретическая дисциплина может рассматриваться как раздел дискретной математики, исследующий свойства конечных множеств (бесконечные графы не будут вводиться в рассмотрение) с заданными отношениями между их элементами. Как прикладная дисциплина теория графов позволяет описывать и исследовать многие физические, технические, экономические, биологические, социальные и другие системы (задача коммивояжера). Например, графом, изображенным на рис. 1, в котором точки − вершины графа − города, линии, соединяющие вершины − ребра − дороги, соединяющие города, описывается так называемая транспортная задача (задача нахождения кратчайшего пути из одного города- пункта в другой).

Рис. 1
Графом
G
называется совокупность двух множеств:
вершин V и ребер Х, между элементами
которых определено отношение инцидентности
– каждое ребро х![]() Х
инцидентно двум вершинам
Х
инцидентно двум вершинам
![]() и
и
![]() V,
которые
оно соединяет. При этом вершина
V,
которые
оно соединяет. При этом вершина
![]() (
(![]() )
и
ребро x
называются инцидентными
друг другу, а вершины
)
и
ребро x
называются инцидентными
друг другу, а вершины
![]() и
и
![]() ,
являющиеся
для ребра x
концевыми точками, называются смежными.
,
являющиеся
для ребра x
концевыми точками, называются смежными.
Граф,
содержащий направленные ребра с началом
![]() и концом
и концом ![]() ,
называется ориентированным
графом
(орграфом),
а ненаправленные – неориентированным
(
н-графом).
Ребра ориентированного графа называются
дугами.
,
называется ориентированным
графом
(орграфом),
а ненаправленные – неориентированным
(
н-графом).
Ребра ориентированного графа называются
дугами.
Примеры
1) Ориентированный граф D=(V, X), V={v1, v2, v3, v4},
X={x1 = (v1, v2), x2= (v1, v2), x3= (v2, v2), x4= (v2, v3)}.

Рис. 2
2) Неориентированный граф G=(V, X), V={v1, v2, v3, v4, v5},
X={x1={v1,v2}, x2={v2,v3}, x3={v2,v4}, x4={v3,v4}}.

Рис. 3
Одинаковые пары ребер - параллельные или кратные ребра;
Кратностью ребер называют количество одинаковых пар.
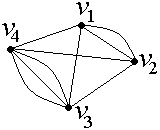
Рис.4
Например, кратность ребра {v1, v2} в графе, изображенном на рис. 4, равна двум, кратность ребра {v3, v4} − трем.
Ребро, концевые вершины которого совпадают, называется петлей.
Граф называется конечным, если множество его элементов (дуг и рёбер) конечно, и пустым, если его множество вершин (а, следовательно, и рёбер) пусто.
Граф без петель и кратных рёбер называется полным графом, если каждая пара вершин соединена ребром.
Дополнением графа G называется граф G*, имеющий те же вершины, что и граф G, и содержащий только те ребра, которые нужно добавить к графу G, чтобы получить полный граф.
Степенью (или валентностью) вершины V н-графа называется количество рёбер (), инцидентных вершине .

Рис. 5
Вершина графа, имеющая степень 0, называется изолированной, а степень 1 – висячей.
Полустепенью захода (исхода) вершины v ориентированного графа D называется число +(v) ((v)) дуг ориентированного графа D, исходящих из v (заходящих в v).
Следует заметить, что в случае ориентированного псевдографа вклад каждой петли инцидентной вершине v равен 1 как в +(v), так и в (v). Рассмотрим рис. 5: +(v2)=3; (v2)=2.
Псевдограф − граф, в котором есть петли и/или кратные ребра.
Мультиграф − псевдограф без петель.
Графы G1и G2 равны, если их множества вершин и ребер совпадают
1 =2 и х1=х2.
Итак, используемые далее обозначения:
V – множество вершин;
Х, Е – множество ребер или дуг;
v (или vi)– вершина или номер вершины;
G, G0 - неориентированный граф;
D, D0 – ориентированный;
{v,w} − ребра неориентированного графа;
{v,v} – обозначение петли;
(v,w) − дуги в ориентированном графе;
v,w - вершины, x,y,z – дуги и ребра;
n(G), n(D) количество вершин графа;
m(G) - количество ребер, m(D) - количество дуг.