

2. Определение ускорения свободного падения методом оборотного маятника
Цель работы: усвоение знаний по разделу «Гармонические колебания», приобретение практических навыков определения ускорения свободного падения.
Оборудование
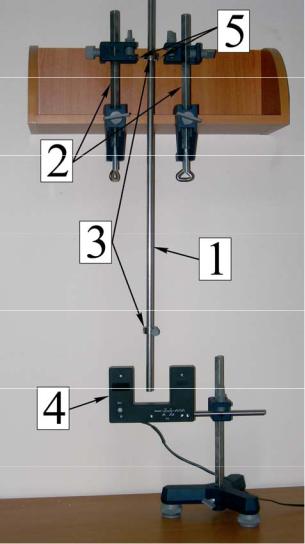
Общий вид экспериментальной установки представлен на рисунке 1. Основными элементами установки являются:
1- металлический стержень;
2- штативные стержни;
3- опорные втулки;
4- счётчик времени;
5- опорные призмы.
Рис. 1. Общий вид установки
16
2.1. Задание для работы
1.Собрать оборотный маятник.
2.Экспериментально определить ускорение свободного падения.
2.2. Методика эксперимента
2.2.1. Краткие теоретические сведения
Измерения ускорения свободного падения g выполняются с помощью косвенных методов. Один из них основан на использовании формулы для периода T колебаний математического маятника:
T = 2π |
l0 |
, |
(1) |
|
g |
|
|
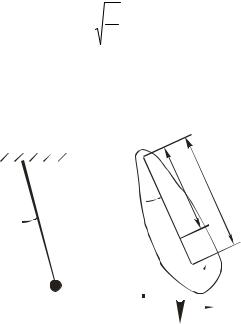
где l0 - длина маятника. Математический маятник − это идеализированная система, состоящая из материальной точки массой m , подвешенной на нерастяжимой невесомой нити (рис. 2). Измерив длину l0 и период колебаний T , можно вычислить g .
|
|
O |
|
|
|
l L |
|
|
|
||||
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|||
|
|
|
|
|||
l 0 |
|
|
ϕ |
|||
|
|
|||||
ϕ |
|
|
C |
|
O |
|
|
|
|
||||
|
|
|
||||
m |
|
|
|
|||
|
|
|||||
|
|
l sinα |
|
|||
|
|
|
||||
|
|
|||||
|
|
|||||
|
|
|
Mg |
|||
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Рис. 2. Математический и физический маятники
Однако практически математический маятник создать невозможно, и любой маятник является физическим. Физическим маятником называется твёрдое тело, которое может совершать колебания вокруг неподвижной горизонтальной оси проводящей через точку подвеса O – OZ (рис. 2).
Движение маятника описывается уравнением динамики вращательного движения твердого тела:
М = I |
d 2ϕ |
, |
(2) |
|
dt2 |
|
|
где M − результирующий вращательный |
момент, I – момент инерции |
физического |
|
маятника относительно оси вращения, ϕ − угол отклонения маятника от положения
равновесия.
Силой, вызывающей вращение маятника, является сила тяжести mg (рис. 2),
поэтому М = [ r mg ] . Пусть центр тяжести – точка С – расположена на расстоянии l от оси вращения, тогда
M z = −mg sinϕ l . |
(3) |
Уравнение (2) в проекции на ось ОZ имеет вид |
|
I d 2ϕ = −mgl sinϕ , |
(4) |
dt2 |
|
17
Если отклонения маятника от вертикали при колебаниях не превышают 70, sinϕ отличается от угла ϕ, измеренного в радианах, менее чем на 0,5%. Значит, уравнение
(4) для малых колебаний маятника можно упростить, заменив в нем sinϕ на ϕ. Сделав такое упрощение, можно прийти к уравнению гармонических колебаний:
|
|
|
d 2ϕ |
|
+ |
mgl |
ϕ = 0 . |
|
||
|
mgl |
|
dt 2 |
I |
|
|||||
|
|
|
|
|
|
|||||
Обозначая |
=ω2 , получим |
|
|
|
||||||
|
I |
|
|
|
|
|
|
|
|
|
|
|
|
|
d 2ϕ |
|
+ω2ϕ = 0 . |
(5) |
|||
|
|
|
|
dt 2 |
|
|||||
|
|
|
|
|
|
|
|
ϕ =ϕ0 cos (ω t +α0 ), где ϕ0 – амплитуда |
||
Уравнение |
(5) |
имеет решение в виде |
||||||||
колебаний, ω - частота колебаний, α0 – начальная фаза колебаний. Период колебаний маятника равен
T = |
2π |
= 2π |
I . |
(6) |
|
ω |
|
mgl |
|
Здесь I – момент инерции маятника относительно оси вращения, m – его масса, l – расстояние от центра масс до оси вращения. Сравнив эту формулу с формулой периода колебаний математического маятника (1), можно заметить, что физический маятник совершает колебания с тем же периодом, с которым колебался бы математический
маятник длиной L = mlI . Эта величина называется приведенной длиной маятника.
Массу маятника и период его колебаний можно измерить с очень большой точностью, но точно измерить момент инерции не удается. Указанного недостатка лишен метод оборотного маятника (метод Бесселя), который позволяет исключить момент инерции из расчетной формулы для определения ускорения свободного падения g.
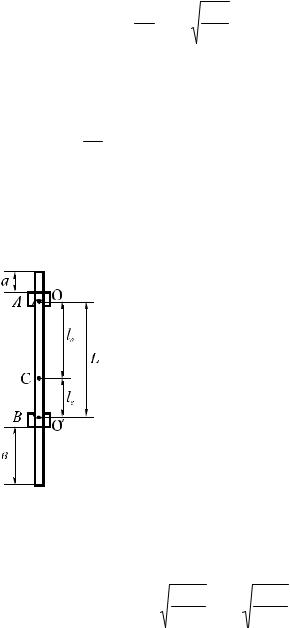
Рис. 3. Оборотный маятник
осей O и O´ совпадают, то есть
Метод оборотного маятника основан на том, что период колебаний физического маятника не изменяется при перемещении оси подвеса в центр качаний O´. Центром качаний O´ называется точка, лежащая на прямой соединяющей точку подвеса с центром масс маятника, и отстоящая от оси подвеса на расстоянии приведенной длины L (рис. 2). В данной работе физический маятник представляет собой стержень, вдоль которого могут перемещаться и закрепляться опорные втулки А и В (рис. 3). Маятник качается вокруг горизонтальных осей, проходящих через эти втулки.
Будем менять период колебания маятника, двигая втулку B (рис. 3). Допустим, что нам удалось найти такое положение втулки B, при котором периоды колебаний маятника TA и TB относительно
TA =TB =T = 2π |
I A |
= 2π |
IB . |
(7) |
|
mglA |
mglB |
|
|
18