5.4. Момент инерции. Теорема штейнера
Согласно
формуле (5.2), момент инерции тела –
аддитивная величина
![]() ,
,
момент инерции тела равен сумме моментов инерции всех его частиц.
Важно отметить, что момент инерции существует безотносительно к вращению. Каждое тело, независимо от того, вращается оно или нет, обладает определенным моментом инерции относительно любой оси. Из выражения (5.7) следует, что один и тот же момент силы вызывает большее угловое ускорение у того тела, у которого момент инерции меньше. Таким образом, момент инерции является мерой инертности тела при вращательном движении.
Эту
формулу можно представить в виде
![]() ,
где
,
где
![]() - плотность
- плотность![]() -той
частицы,
-той
частицы,![]() -
ее объем. Если тело однородно, его
плотность постоянна, и суммирование по
всем частицам сводится к интегралу:
-
ее объем. Если тело однородно, его
плотность постоянна, и суммирование по
всем частицам сводится к интегралу:
![]() Интегрирование производится по всему
объему тела. Величины
Интегрирование производится по всему
объему тела. Величины
![]() и
и![]() зависят от местоположения частицы, т.е.
являются функциями ее координат.
зависят от местоположения частицы, т.е.
являются функциями ее координат.
Найдем момент инерции однородного диска относительно оси, перпендикулярной плоскости диска и проходящей через его центр (рис. 5.12).
Р азобьем
диск на кольцевые слои толщиной
азобьем
диск на кольцевые слои толщиной![]() и рассмотрим один такой слой. Все его
точки находятся на одинаковом расстоянии
от оси вращения, равном
и рассмотрим один такой слой. Все его
точки находятся на одинаковом расстоянии
от оси вращения, равном![]() .
Объем слоя равен
.
Объем слоя равен![]() ,
где
,
где![]() -
толщина диска. Диск однородный, его
плотность одинакова во всех точках,
тогда момент инерции диска равен
-
толщина диска. Диск однородный, его
плотность одинакова во всех точках,
тогда момент инерции диска равен

где
![]() - радиус диска. Очевидно, масса диска
равна
- радиус диска. Очевидно, масса диска
равна![]() ,
тогда получаем
,
тогда получаем![]() .
.
Определение
момента инерции тела относительно
произвольной оси существенно упрощается,
если воспользоваться теоремой Штейнера:
момент инерции
![]() относительно
произвольной оси равен сумме момента
инерции
относительно
произвольной оси равен сумме момента
инерции![]() относительно
оси, параллельной данной и проходящей
через центр масс тела, и произведения
массы тела на квадрат расстояния
относительно
оси, параллельной данной и проходящей
через центр масс тела, и произведения
массы тела на квадрат расстояния![]() между
осями
между
осями![]()
![]() .
.
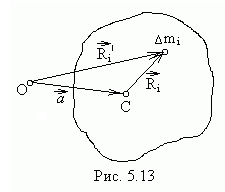 Для
доказательства этой теоремы рассмотрим
ось С
(рис.5.13), проходящую через центр масс
тела, и параллельную ей ось О,
отстоящую от точки С
на расстояние
Для
доказательства этой теоремы рассмотрим
ось С
(рис.5.13), проходящую через центр масс
тела, и параллельную ей ось О,
отстоящую от точки С
на расстояние
![]() .
Из точки на осиО
к оси С
проведем вектор
.
Из точки на осиО
к оси С
проведем вектор![]() ,перпендикулярный
к обеим осям. Из конца вектора
,перпендикулярный
к обеим осям. Из конца вектора![]() проведем вектор
проведем вектор![]() ,
перпендикулярный к осиС
в точку с элементарной массой
,
перпендикулярный к осиС
в точку с элементарной массой
![]() .
Аналогичный вектор
.
Аналогичный вектор![]() проведем
из начала вектора
проведем
из начала вектора![]() к той же элементарной массе. Из рисунка
видно, что
к той же элементарной массе. Из рисунка
видно, что
![]() Квадрат расстояния от оси С до выбранной
частицы равен
Квадрат расстояния от оси С до выбранной
частицы равен
![]() ,
а от осиО
,
а от осиО
![]() Тогда момент инерции относительно осиО
Тогда момент инерции относительно осиО

В
этом выражении
![]() -
момент инерции тела относительно осиС,
-
момент инерции тела относительно осиС,
![]() -
масса тела,
-
масса тела,![]() ,
где
,
где![]() - вектор, проведенный от осиС
к центру масс тела,
- вектор, проведенный от осиС
к центру масс тела,
![]() =0,
так как центр масс лежит на осиС,
поэтому второе слагаемое равно нулю.
Тогда получаем
=0,
так как центр масс лежит на осиС,
поэтому второе слагаемое равно нулю.
Тогда получаем
![]()
что и требовалось доказать.
В
случае произвольного твердого тела
связь между векторами
![]() и
и![]() более
сложная, чем рассмотренная выше. Однако
модули этих векторов всегда остаются
пропорциональны друг другу, следовательно,
каждая компонента вектора
более
сложная, чем рассмотренная выше. Однако
модули этих векторов всегда остаются
пропорциональны друг другу, следовательно,
каждая компонента вектора![]() будет линейно зависеть от компонент
вектора
будет линейно зависеть от компонент
вектора![]() :
:
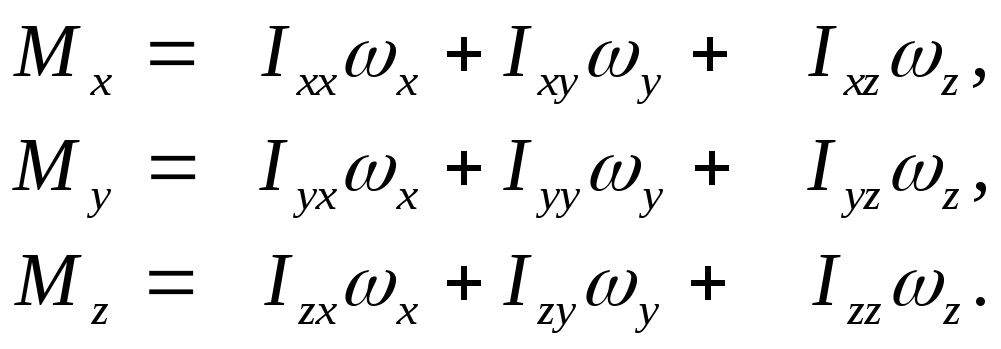
Здесь
![]() и
т.д. – коэффициенты пропорциональности,
имеющие размерность момента инерции.
При увеличении
и
т.д. – коэффициенты пропорциональности,
имеющие размерность момента инерции.
При увеличении![]() в
некоторое число раз в такое же число
раз увеличится каждая из компонент
в
некоторое число раз в такое же число
раз увеличится каждая из компонент![]() ,
,![]() ,
,![]() и каждая из компонент
и каждая из компонент![]() ,
а значит, и сам вектор
,
а значит, и сам вектор![]() .
Взаимная ориентация векторов
.
Взаимная ориентация векторов![]() и
и![]() определяется значениями коэффициентов
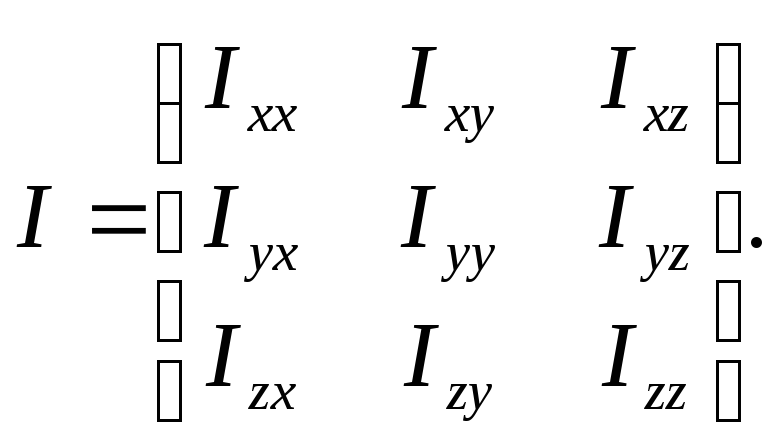
пропорциональности. Все сказанное
означает, что эти коэффициенты являются
компонентами тензора второго ранга,
который называется тензором инерции
определяется значениями коэффициентов
пропорциональности. Все сказанное
означает, что эти коэффициенты являются
компонентами тензора второго ранга,
который называется тензором инерции