

3. Метод Гаусса для получения общего решения однородной системы
Рассмотрим однородную систему (2). Мы можем переставлять уравнения местами, прибавлять к одному уравнению другое, умноженное на число, и всякий раз получать новую систему, эквивалентную старой, то есть имеющую то же самое множество решений. Эти операции удобней производить над строками матрицы А системы, и ясно, что они соответствуют элементарным преобразованиям строк. Приведем с помощью элементарных преобразований матрицу А к ступенчатому виду. Переменные хi, соответствующие угловым элементам (т.е. имеющие те же номера, что и номера столбцов, содержащих угловые элементы) назовем главными или зависимыми, остальные – свободными или независимыми.
Выпишем систему, отвечающую ступенчатому виду

и перенесем в каждом уравнении все члены со свободными переменными вправо. Слева останутся выражения, содержащие только зависимые переменные. Система приобретет вид:
зависимые свободные

Пусть для простоты х1, х2, ..., хr – зависимые, а хr+1, ..., хn – свободные. Тогда новая система имеет вид:

Итак, матрица
коэффициентов при зависимых переменных
– треугольная
(квадратная матрица, все элементы
которой, расположенные ниже главной
диагонали, равны нулю) и при этом
![]() .
Это былпрямой
ход метода Гаусса.
.
Это былпрямой
ход метода Гаусса.
Сделаем обратный ход: из последнего уравнения выразим хr через свободные переменные и подставим полученное выражение в предпоследнее уравнение, затем выразим хr-1 через свободные переменные и подставим выражения для хr, хr-1 в предыдущее («предпредпоследнее», т.е. (r 2)-е) уравнение и т.д. В результате получим выражения зависимых переменных х1, х2, ..., хr через свободные хr+1, ..., хn
 (3)
(3)
Выражения (3) задают множество решений однородной системы (2). Свободным переменным хr+1, ..., хn мы можем придавать любые значения (они играют роль произвольных параметров для множества решений системы) в то время как зависимые переменные получают соответствующие значения, вычисляемые по формулам (3). Всякий раз мы получаем некоторое решение, и все решения могут быть таким образом получены. Поэтому систему (3) называют общим решением в координатной форме системы (2). Иногда его представляют так:
 (4)
(4)
где отчетлива видно, что свободным переменным хr+1, ..., хn отводится роль параметров с1, ..., сnr .
Поскольку общее число зависимых и независимых переменных равно n, а число зависимых переменных равно рангу матрицы А, то размерность подпространства решений однородной системы
dim L =n- rank А.
Общее решение (3) позволяет найти базис в подпространстве L решений системы (2) и представить общее решение как произвольную линейную комбинацию элементов этого базиса. Свободным переменным хr+1, ..., хn будем последовательно придавать значения, соответствующие координатам векторов стандартного базиса в Rnr:
 .
.
Наборам е1, ..., еnr свободных переменных соответствуют векторы
 ,
,
составляющие базис в L.
Определение. Базис в подпространстве решений однородной системы называется фундаментальной системой решений (ФСР).
Линейная комбинация элементов ФСР
![]() (5)
(5)
есть произвольный вектор из L. Запись (5) называется общим решением в векторной форме системы (2).
Итак, размерность
подпространства L
есть n r,
где
![]() .
Чем меньшеrank А,
тем большую размерность имеет
L
и наоборот. В случае, когда
.
Чем меньшеrank А,
тем большую размерность имеет
L
и наоборот. В случае, когда
![]() (т.е.А
имеет «полный ранг»),
(т.е.А
имеет «полный ранг»),
![]() ,
т.е.L
имеет нулевую размерность, и, значит,
состоит лишь из нулевого вектора
,
т.е.L
имеет нулевую размерность, и, значит,
состоит лишь из нулевого вектора
![]() .
В этом случае (2) имеет единственное
нулевое решение.
.
В этом случае (2) имеет единственное
нулевое решение.
Пример. Решить систему

Матрица системы
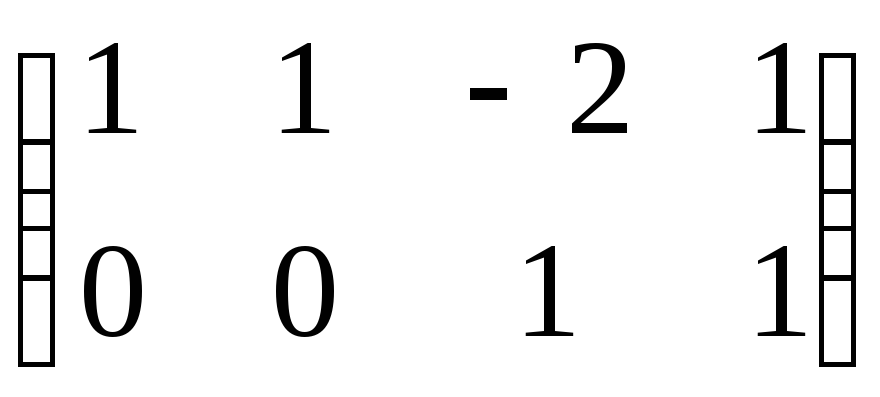
уже имеет ступенчатый вид. Значит, прямой ход метода Гаусса делать не нужно. Зависимые переменные – это х1 и х3 (соответствуют угловым элементам матрицы), свободные – х2 и х4.
Перенесем члены со свободными переменными вправо:

Обратный ход метода
Гаусса: подставляем
![]() в первое уравнение:
в первое уравнение:
![]() .
.
Итак:

– общее решение в координатной форме.
Запишем общее решение в векторной форме. Возьмем стандартный базис в R2:
 .
.
Находим ФСР. Положим:
1)
![]() .
.
Получим
 ;
;
2)
![]()
Получим
 .
.
Векторы
![]() образуют ФСР.
образуют ФСР.
Общее решение однородной системы в векторной форме:
 .
.