

4.2 Типовые компоновки и выбор типа приводов главного движения и подач многоцелевых станков (оц) для обработки корпусных деталей.
В ГПС наибольшее применение находят станки с высокой конц-ей переходов обр-ки, типа обр-щих центров (ОЦ). Сверлильно-фрез-расточные станки типа ОЦ обладают широкими технологич возможностями и вслед-вии интеграции обр-ки позволяют в 2-3 раза умен-ть число необх-го более простого оборуд-я,, приспос-ний, выполнить обр-ку практически со всех сторон за один установ заг-ки. При этом осущ-ся практически все виды обр-ки со снятием стружки. Применяют след-ие типы ОЦ: 1. гориз-ый с крестовым поворотным столом, 2. вертик-ый с крест-м столом, 3. гориз-ый с подвижной стойкой и подвижным повор-м столом, 4. гор-ный с наклонноповоротным столом, 5. вертик-ый с подвижной стойкой и подвижным столом, 6. гориз-ый с вертик-м крестовым суппортом и гориз-но перемещ-ся суппортом, 7. гориз-й с крестовой стойкой и неподвиж-м столом-плитой, 8. вертик-й одностоячный с поперечиной и подвиж-м столом, 9. двухстоячный с поперечиной и подвижным столом.
Наличие вращ-го инстр-та и программное угловое вращ-е шпинделя позволяет обр-ть внецентровые отв-я, шпоночные пазы. Также имеется возм-ть при одноврем-м вращении шп-ля и перемещении инстр-та получать отв-я фигурной формы. Компоновки: (1). ОЦ- ИР500МФ4(ток-фрез-расточной) (рис 5.2.1) , 1-станина, 2- стол(движ по Х), 3- стойка (движ по Z) , 4-поворотный стол, 5- магазин, 6- автооператор (чтобы брать инстр-т из магазина), 7- шпиндельная бабка (движ поY), 8- шпиндель, 9- полета (приспособление-спутник), 10- предмет обр-ки (заг-ка), 11- двухпозиционный приставной поворотный стол. Используется позиционно-контурная система упр-ния. Инст-т: торцевые фрезыдо 100 мм, сверло- до 40 мм, метчик- до М20, расточный скалки, оправки (отв-я до 160 мм). (2). Миницентр ИР200АМФ4. Прецизионный станок высокого тех уровня для обр-ки корпусных деталей (сверлит, растачивает, шлифует)……………………………………………..
Многоцелевые станки оснащены УЧПУ и, устройством автоматической смены инструментов и предназначены для комплексной обработки за одну установку корпусных деталей и деталей типа тел вращения. Многоцелевые станки выпускают: с одним шпинделем и многопозиционным инструментальным магазином (вместимостью от 12 до 120 инструментов), при этом инструмент заменяется в шпинделе автоматически (по программе) за 5-6 секунд; с револьверной инструментальной головкой (число инструментов 5-8), при этом смена инструмента осуществляется поворотом револьверной головки; с револьверной головкой и инструментальным магазином, что позволяет в процессе резания заменять инструменты в неработающих шпинделях револьверной головки. На многоцелевых станках можно осуществлять сверление, рассверливание, зенкерование. нарезание резьбы, растачивание, фрезерование и другие виды обработки. Точность отверстий после растачивания соответствуетб-7 квалитету. Существуют многоцелевые станки, у которых ось шпинделя устанавливается по программе горизонтально, вертикально или под любым углом к плоскости стола станка. Многоцелевые станки могут оснащаться приспособлениями- спутниками (ПС) для установки и закрепления заготовок, а также устройством смены ПС. Выпускают многоцелевые станки вертикальной и горизонтальной компоновки. Многоцелевые станки вертикальной компоновки предназначены для обработки заготовок с одной стороны, а при наличии многопозиционных и поворотных приспособлений - с нескольких сторон. Горизонтальные многоцелевые станки предназначены для обработки заготовок с 2-4х, а иногда и с 5ти сторон - шпиндельные головки имеют поворот вокруг вертикальной и горизонтальной осей. Наиболее распространены компоновки горизонтальных многоцелевых станков с крестовым поворотным столом и шпиндельной бабкой, имеющей вертикальное перемещение. Многоцелевые станки оснащают позиционными, контурными и позиционно- контурными УЧПУ типа CNC. Приводы главного движения многоцелевых станков обеспечивают регулирование частоты вращения шпинделя в широком диапазоне при максимальной частоте вращения 3000-4000 об/мин. В этих приводах используют двигатели постоянного тока с тиристорным управлением. Для малых и средних многоцелевых станков применяют приводы с асинхронным электродвигателем и коробками скоростей. Привод подач состоит ш высоко моментного электродвигателя постоянного тока с бесступенчатым регулированием. Электродвигатель через редуктор соединяется с парой винт-гайка качения В крупных станках вместо редуктора используют двухступенчатые коробки скоростей с электромагнитными муфтами.
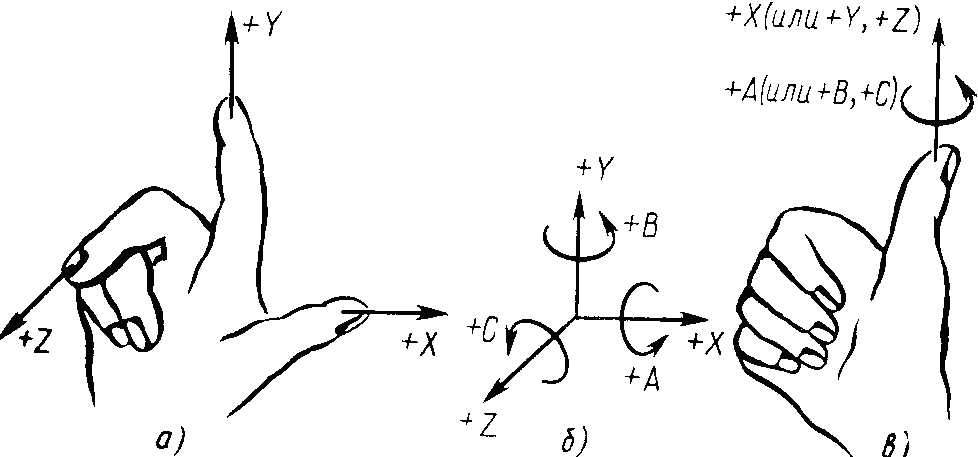
Рис. 2.4, Схемы для определения направлений осей координат и углового поворота вокруг осей:
а — правило трех пальцев правой руки, б — правая прямоугольная координатная система; в — правило правого винта
Для определения координатных осей и их положений для каждого конкретного станка применяют правило трех пальцев правой руки (рис. 2,4, а), согласно которому согнутый средний палец отождествляется с осью Z, указательный — с осью Y, отогнутый в сторону большой палец — с осью X; концы этих пальцев указывают положительное направление осей.
На рис. 2.4, б показана для сравнения правая прямоугольная координатная система. Положительное направление углового оворота вокруг координатной оси определяют, как показано на рис. 2.4, в, или по правилу правого винта (буравчика).
Гаммы станков. Удачной можно считать такую компоновку станка, на основе которой возможно создание гаммы станков различного технологического назначения с большим числом заимствованных узлов. Пример такой гаммы вертикально-фрезерных станков приведен на рис. 2.5. Базовой является трехкоординатная компоновка станка с поперечным ползуном /, несущим шпиндельную головку (рис. 2.5, а). По такой схеме строят трехкоординатные вертикально-фрезерные станки ФП-7, ФП-17, ФП-27 и ФП-37 с ЧПУ с длиной ходов по координате X 1600—3000 мм и координате Y 650—1000 мм. Эти станки предназначены для обработки фасонных поверхностей с переменной глубиной по координате Z.
На основе базовой компоновки создана модификация трехкоординатного вертикально-фрезерного станка 2ФП-27 с двух-шпиндельной фрезерной головкой / (рис. 2.5, б), позволяющей повысить производительность станка, причем управление перемещениями по координате Z каждого из шпиндельных узлов может осуществляться независимо.
Дальнейшее развитие гаммы станков идет по пути оснащения базовой компоновки магазином инструментов / (рис. 2.5, в), расположенным вдоль ползуна; по такой схеме строят станки ФП-27С, предназначенные для обработки заготовок последовательно несколькими инструментами. При этом вертикально-фрезерный станок превращается в многооперационный, на котором, помимо фрезерования, можно выполнять сверление, зен-керование, растачивание и другие операции.
Четырехкоординатная компоновка станка, предназначенного для обработки профильных малкованных (с переменным наклоном) поверхностей,' достигается установкой поворотного устройства 1 (рис. 2.5, г), управляемого по числовой программе и состоящего из передней и задней стоек. Повышенная жесткость станка и оптимальные габариты его при длине перемещения по координате X до 5 м достигаются в компоновке с неподвижным (по координате X) поворотным столом 2 (рис. 2.5, д) и подвижным (по координате X) ползуном / (станки ФП-27-4С и ФП-57-4С).
Сокращение вспомогательного времени достигается включением в состав станка двухпозиционного устройства автоматизированной загрузки заготовки на спутнике 2 (рис. 2.5, е); при этом стол станка оснащается устройством / приемки, фиксации и крепления спутника.
Вторая позиция для спутника устройства автоматизированной загрузки заготовок выводится в рабочее состояние поворотом на 180° внутренней части устройства вокруг оси 3; при этом спутник 2 опрокидывается в нижнее положение.
На основе базовой компоновки согласно рис. 2.5, а могут быть созданы иные модификации конструктивных схем. Вместе
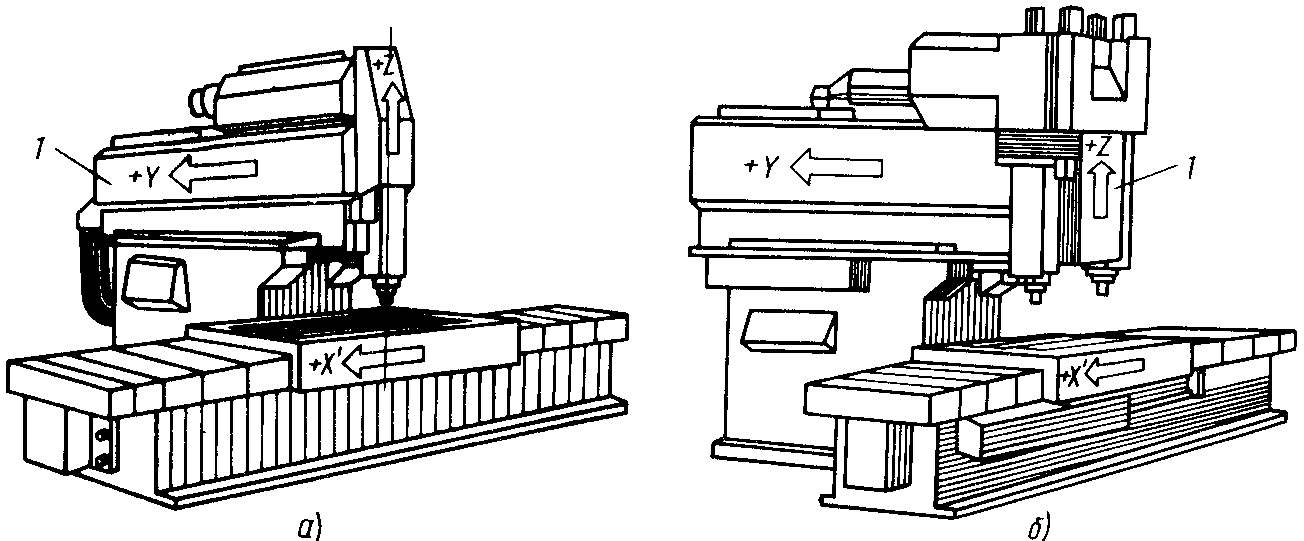
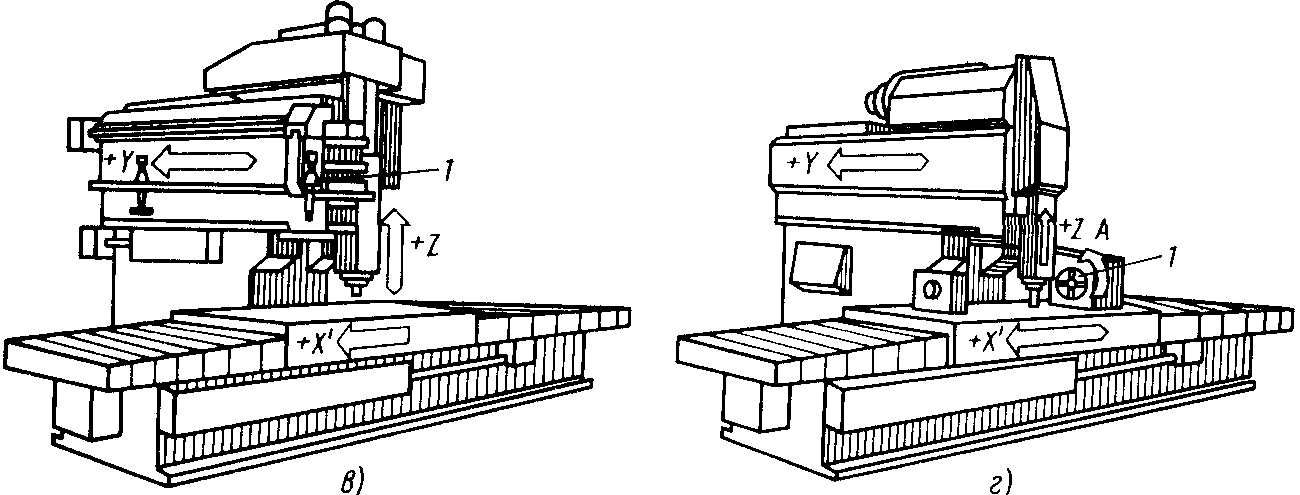
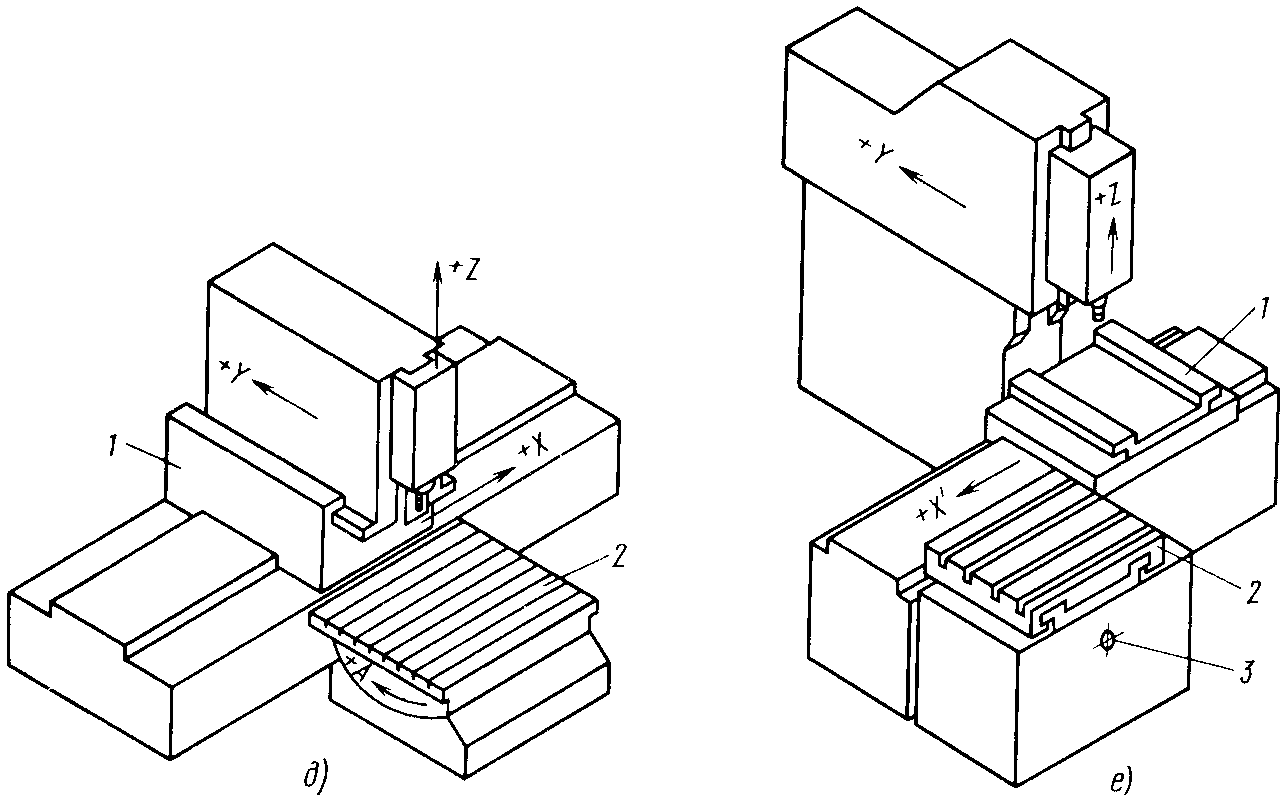
Рис. 2.5. Компоновки гаммы вертикально-фрезерных станков средних габаритов
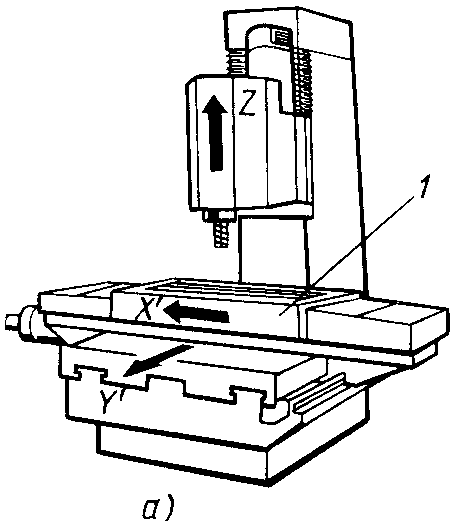
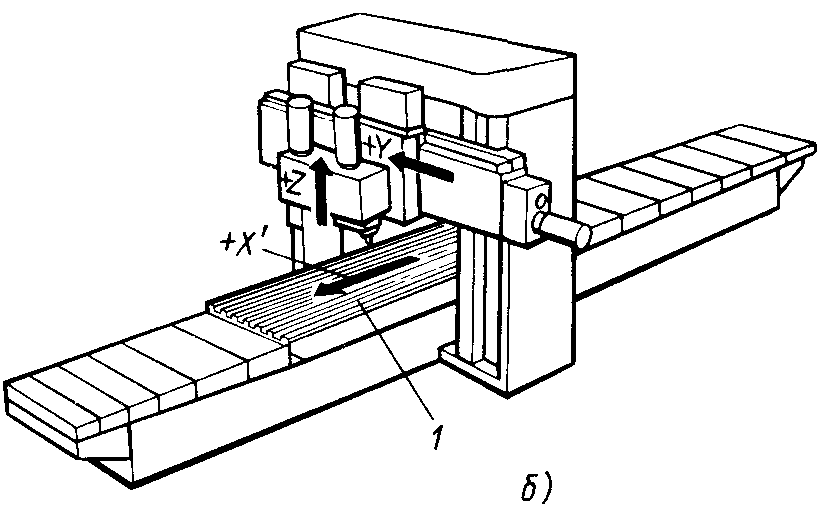
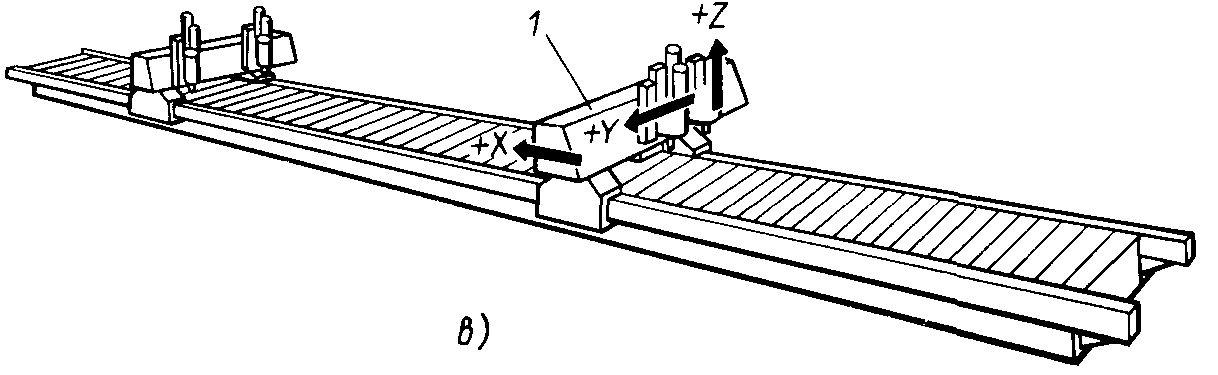
Рис. 2.6. Базовые компоновки фрезерных станков с различными ходами перемещений
с тем сама базовая компоновка может видоизменяться в зависимости от размеров (значений ходов по координатам) станка для обеспечения более высокой жесткости и сокращения габаритов.
Компоновка бывает трех видов:
с крестовым столом / (рис. 2.6, а) и неподвижной колонной, несущей шпиндельную головку, которая перемещается по координате Z; такая компоновка распространена в бесконсольных фрезерных станках с длиной перемещения в поперечном направлении Y до 600 мм и продольном направлении X — до 2 м; в соответствии с ней строят станки МА-655;
портальная, с подвижным столом / (рис. 2.6, б), перемещающимся на расстоянии до 10 м; эта компоновка применяется для станков ФП-9М, ВФ-ЗМ;
портальная, с подвижным порталом / (рис. 2.6, в) при длине хода по координате X 6 м и более; она применяется для станков ПФП-5, 2ФП-231, 2ФП-242В.
На основе каждой из компоновок согласно рис. 2.6 строят модификации, подобно тому как это было показано на рис. 2.5.
Сравнив станок с четырехкоординатной компоновкой, где предусмотрены перемещающиеся сани и поворотный стол (см. рис. 2.5, д), со станками с портальной компоновкой (см. рис. 2.6, б и б), на которых можно осуществлять программируемый поворот фрезерной головки, можно определить их рациональные области применения: