

6.3. Электромагнитный момент и механическая характеристика
асинхронного двигателя
Электромагнитный или вращающий момент создается при взаимодействии вращающегося магнитного поля статора с током обмотки вращающегося ротора, который определяется по формуле:
![]() ,
(6.9)
,
(6.9)
где с – конструктивная постоянная машины, зависящая от числа полюсов, числа
витков обмотки статора и выполнения обмотки,
![]() –максимальный
магнитный поток статора,
–максимальный
магнитный поток статора,
![]() –активная
составляющая тока в фазе обмотки
вращающегося ротора,
–активная
составляющая тока в фазе обмотки
вращающегося ротора,
![]() –фазовый
угол между ЭДС и током в фазе обмотки
вращающегося ротора.
–фазовый
угол между ЭДС и током в фазе обмотки
вращающегося ротора.
Представим
эквивалентную схему замещения обмотки
вращающегося
ротора в виде рис. 6.7, где
![]() –
активное сопротивление обмотки ротора,
–
активное сопротивление обмотки ротора,
![]() –
индуктивность обмотки ротора,
–
индуктивность обмотки ротора,
![]() –
индуктивное сопротивление вращающегося
ротора, которое можно представить в
виде:
–
индуктивное сопротивление вращающегося
ротора, которое можно представить в
виде:
![]() ,
(6.10)
,
(6.10)
где
![]() –
индуктивное сопротивление неподвижного
ротора.
–
индуктивное сопротивление неподвижного
ротора.
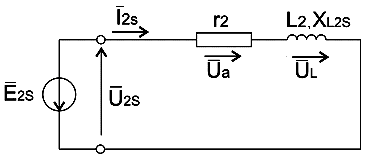
Рис.6.7. Схема замещения обмотки вращающегося ротора
На рис.6.8 изображена векторная диаграмма схемы замещения обмотки вращающегося ротора.

Рис.6.8. Векторная диаграмма схемы замещения обмотки вращающегося ротора
Здесь векторы напряжений на активном сопротивлении и индуктивности определяются по закону Ома:
![]() ,
,
![]() .
(6.11)
.
(6.11)
Если полное сопротивление вращающегося ротора соответствует выражению
![]() ,
(6.12)
,
(6.12)
то векторы питающего напряжения и тока цепи обмотки вращающегося ротора, а также коэффициент мощности определяются по формулам:
![]() ,
,
![]() ,
,
![]() ,
(6.13)
,
(6.13)
где
![]() –
вектор ЭДС неподвижного ротора.
–
вектор ЭДС неподвижного ротора.
В связи
с тем, что конструктивный коэффициент
с
и
максимальный магнитный поток статора
![]() –
величины постоянные, то электромагнитный
или вращающий момент двигателя можно
преобразовать:
–
величины постоянные, то электромагнитный
или вращающий момент двигателя можно
преобразовать:
 (6.14)
(6.14)
Механическую
характеристику асинхронного двигателя
можно представить в виде зависмостей
![]() или
или
![]() .
.
На
рис.6.9
изображена зависмость
![]() .
Здесь
.
Здесь
![]() –
зона устойчивой работы двигателя,
–
зона устойчивой работы двигателя,
![]() – зона неустойчивой работы двигателя,
– зона неустойчивой работы двигателя,
![]() –
критическое скольжение,
–
критическое скольжение,
![]() – пусковой момент при условии, что
– пусковой момент при условии, что
![]() .
.

Рис.6.9.
Механическая характеристика асинхронного
двигателя
![]()
Наибольшее
распространение получила механическая
характеристика
![]() (рис.6.10).
Здесь участок естественной характеристики
(А
– В)
представляет устойчивый режим работы
двигателя, который можно снять в
результате экперимента. Участок (В
– Мп)
нельзя снять в результате экперимента,
так как
(рис.6.10).
Здесь участок естественной характеристики
(А
– В)
представляет устойчивый режим работы
двигателя, который можно снять в
результате экперимента. Участок (В
– Мп)
нельзя снять в результате экперимента,
так как
![]() является опрокидывающим моментом
асинхронного двигателя.
является опрокидывающим моментом
асинхронного двигателя.

Рис.6.10.
Механическая характеристика асинхронного
двигателя
![]()
Для расчёта значений неустойчивого участка характеристики используется формула Клосса:
 .
(6.15)
.
(6.15)