

6.2 Вибір елементів, що формують зворотні зв’язки
Вибирається сельсинна пара, параметри якої вказані в таблиці 6.3.
Таблиця 6.3 - Параметри елементів сельсинної пари
|
|
Тип |
Напруга збудження, В |
Частота напруги збудження, Гц |
Максимальна напруга синхронізації, В |
|
Сельсин-датчик |
СС-405ТВ |
|
|
|
|
Сельсин-приймач |
СС-405ТВ |
|
|
|
Розраховується коефіцієнт передачі сельсинів:
![]() .
(6.1)
.
(6.1)
Крутизна сигналу похибки
![]() ,
яка визначається крутизною вимірників
кута розузгодження, розраховується
нижче:
,
яка визначається крутизною вимірників
кута розузгодження, розраховується
нижче:
![]() (В/рад).(6.2)
(В/рад).(6.2)
Сумарний коефіцієнт підсилення в ланцюзі сигналу похибки дорівнює:
![]()
![]() ,
(6.3)
,
(6.3)
де:
![]()
![]() ;
;
![]() (В
(В![]() с)
- коефіцієнт пропорціональності між
протиЕРС і швидкістю електродвигуна;
с)
- коефіцієнт пропорціональності між
протиЕРС і швидкістю електродвигуна;
![]() .
.
Коефіцієнт
підсилення фазочутливого випрямляча
приймається рівним
![]() .
Коефіцієнт підсилення підсилювача
постійного струму
.
Коефіцієнт підсилення підсилювача
постійного струму![]() дорівнює:
дорівнює:
![]()
![]() .
(6.4)
.
(6.4)
Коефіцієнт
зворотного зв’язку за
швидкістю![]() знаходиться нижче:
знаходиться нижче:
![]() , (6.5)
, (6.5)
де
![]()
![]() .
(6.6)
.
(6.6)
Коефіцієнт зворотного зв’язку за швидкістю дорівнює:
![]()
![]() . (6.7)
. (6.7)
Оскільки КТ=0,177
![]() ,а
крутизна тахогенератора К=0,57
,а
крутизна тахогенератора К=0,57
![]() і для більш точного вимірювання
застосовуємо дільник напруги.
і для більш точного вимірювання
застосовуємо дільник напруги.
Оскільки
![]()
![]() ,
,![]()
![]() ,тоді
значення резисторів будуть дорівнювати:
,тоді
значення резисторів будуть дорівнювати:
Задаючись деяким значенням R1=3 кОм,значення R2 дорівнюватиме:
![]() (6.8)
(6.8)
![]() кОм.(6.9)
кОм.(6.9)
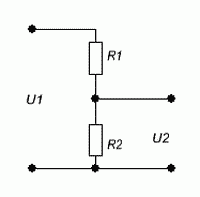
Рис.6.1. – Схема дільника напруги тахогенератора
Коефіцієнт
зворотного зв’язку за
швидкістю![]() знаходиться нижче:
знаходиться нижче:
![]() (6.10)
(6.10)
Коефіцієнт зворотного зв’язку за швидкістю дорівнює:
![]() (6.11)
(6.11)
Значення серієсного опору, який забезпечує зворотний зв’язок по струму, дорівнює:
![]() (Ом), (6.12)
(Ом), (6.12)
де
![]()
![]() - момент інерції двигуна.
- момент інерції двигуна.
7 Розрахунок перехідних процесів
Перехідний процес являє собою такий стан системи, при якому відбуваються безперервні, послідовні зміни параметрів режиму, обумовлені змінами початкових умов або появою збурюючих впливів, що призводить до відхилення режиму від його сталого значення.
Перехідний процес характеризується якістю керування, яке в більшості визначає якість САУ в цілому, тому поряд с аналізом системи відносно стійкості невід’ємною частиною проектування будь-якої САУ є побудова кривої перехідного процесу.
В сучасній практиці аналізу динаміки САУ досить широкого розповсюдження отримав метод побудови перехідних процесів шляхом використання частотної характеристики Р(), яка є дійсною частиною виразу передатної функції W(p) в площині часу.
В розділі 4 була отримана зворотна передавальна функція скоригованої системи:
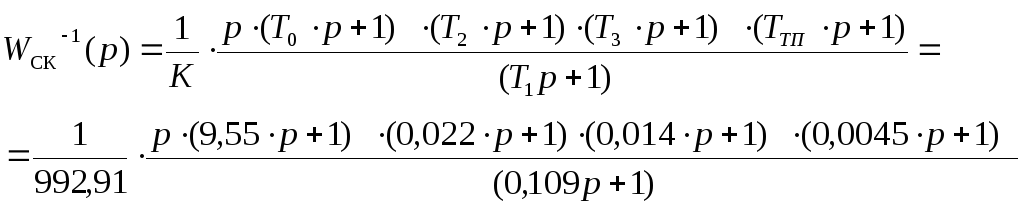 (7.1)
(7.1)
Тоді пряма передавальна функція дорівнює:
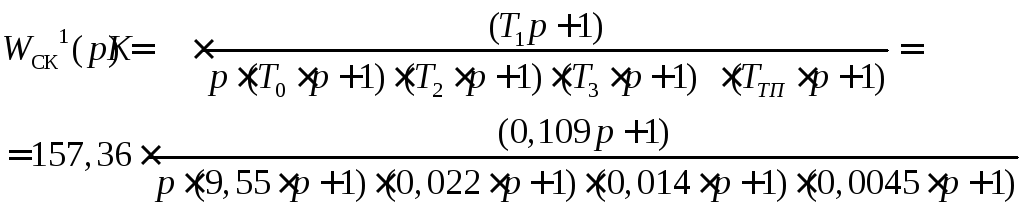 (7.2)
(7.2)
На підставі передатної функції розімкнутої системи можна отримати передатну функцію замкнутої системи:
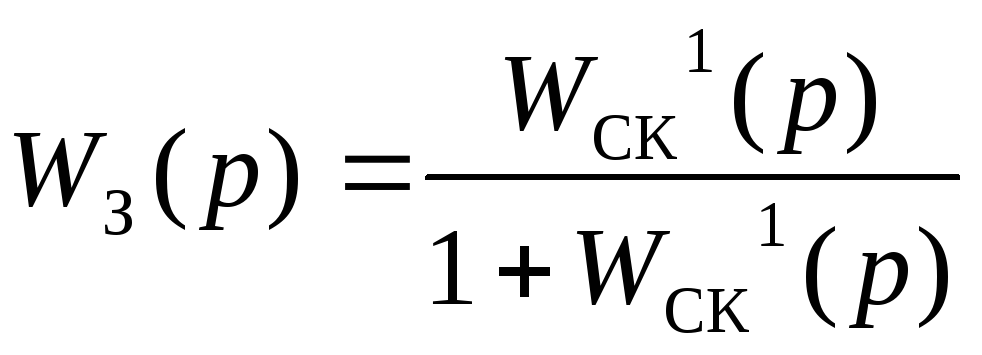 (7.3)
(7.3)
Оператор Лапласа р замінюється на jі потім виділяється дійсна частина.
Маючи динамічну структурну схему електропривода та розрахувавши всі необхідні параметри підставляємо їх в структурну схему і моделюємо у програмному продукті Simulink,яка зображена на рис.7.1.
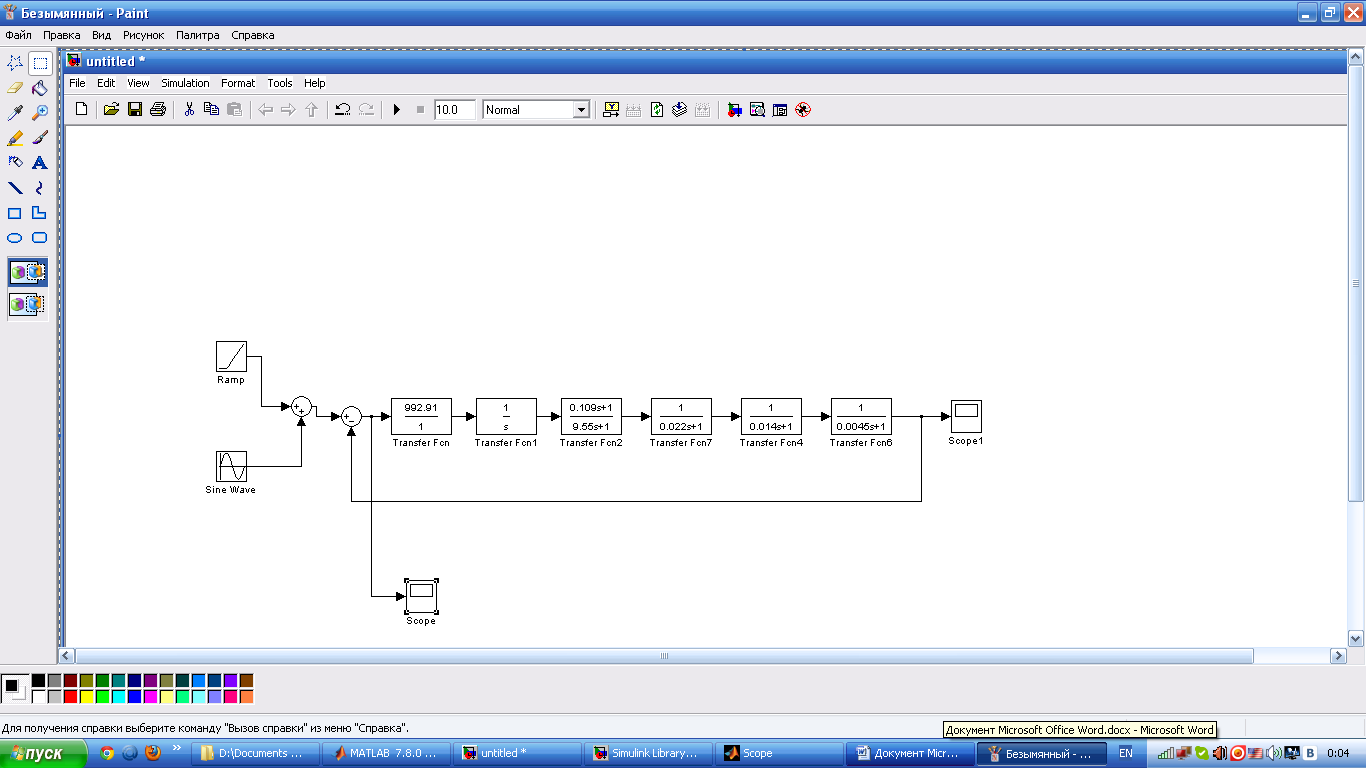
Рис.7.1. – Структурна схема моделі скоректованої САК.
На даній схемі на вхід подається лінійний сигнал Rampта синусний сигналSineWaveв результаті сумування отримується сигнал помилки і графік матиме вигляд. Крива перехідного процесу приведена на рис. 7.2.
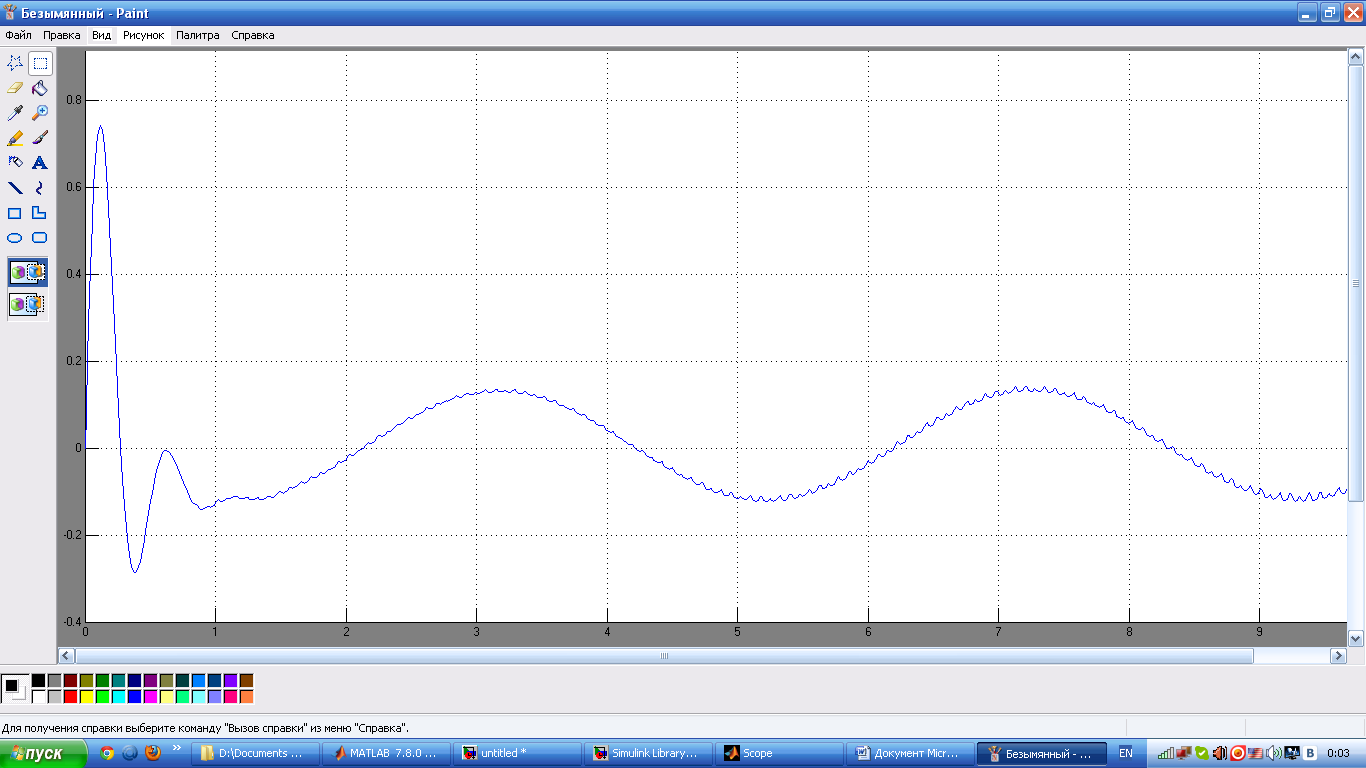
Рис.7.2 – Крива перехідного процесу
Змоделювавши систему у Simulinkбачимо, що сумарна помилка знаходиться в допустимих лімітах отже система буде забезпечувати задані показники точності.
Зміст
Вступ
1. Опис системи
2. Побудова бажаної зворотної логарифмічної амплітудної частотної характеристики (БЗЛАЧХ)
2.1. Вибір типу БЗЛАЧХ
3. Побудова зворотної логарифмічної амплітудної частотної характеристики (ЗЛАЧХ) незмінної частини системи
4.Синтез коригувальних пристроїв
4.1.Синтез послідовного коригувального пристрою
4.2.Синтез паралельного коригувального пристрою
5. Побудова зворотної логарифмічної фазної частотної характеристики (ЗЛФЧХ) скоригованої розімкненої системи
6. Вибір елементів САК
6.1. Вибір елементів коригувального пристрою
6.2.Вибір елементів, що формують зворотні зв’язки
7.Розрахунок перехідних процесів
Висновок
Література
Висновок
У ході курсового проектування був виконаний синтез слідку вального електропривода зі зворотніми зв’язками за струмом та швидкістю якоря.
У курсовому проекті представлений математичний опис спроектованої системи, зроблені синтез і розраховані параметри послідовного коригувального пристрою, обрані і розраховані елементи зворотних зв'язків.
У проекті представлений розрахунок запасу стійкості системи в цілому. Результати розрахунку показують, що спроектована система є стійкою.
Також у проекті зроблений розрахунок перехідного процесу за допомогою методу трапецеїдальних характеристик. Результати розрахунку дозволяють зробити висновок про задовільну якість керування.
Література
1 А.Н. Ткаченко. Судові системи автоматичного управління і регулювання. Навчальний посібник. - Л.: Суднобудування, 1984. - 288 с., іл.
2 А.В. Нетушила. Теорія автоматичного управління. Підручник для вузів. Изд. 2-і, доп. і перероб. М., "Вища школа", 1976.
3 А.Н. Ткаченко, А.П. Гуров, Н.Т. Шаповалов. Методичні вказівки по курсовому проектуванню за курсом судові системи автоматичного управління. - Н., 1981.
4 А.А. Воронов. Основи теорії автоматичного регулювання і управління. - М., Вища школа, 1977.
5 В.Ф. Михайлов. Судова електроавтоматика. - Л., Судобудування, 1970.