

№1 брошюра
.doc
МИНИСТЕРСТВО
СЕЛЬСКОГО ХОЗЯЙСТВА РОССИЙСКОЙ
ФЕДЕРАЦИИ (Минсельхоз
России) Федеральное
государственное образовательное
учреждение высшего профессионального
образования «КУРСКАЯ
ГОСУДАРСТВЕННАЯ СЕЛЬСКОХОЗЯЙСТВЕННАЯ
АКАДЕМИЯ ИМ. ПРОФ. И.И.ИВАНОВА»
Кафедра
Электротехники и МЖ
Лабораторная
работа №1 ИССЛЕДОВАНИЕ
МЕХАНИЧЕСКИХ ХАРАКТЕРИСТИК ТРЕХФАЗНОГО
АСИНХРОННОГО ЭЛЕКТРОДВИГАТЕЛЯ С ФАЗНЫМ
РОТОРОМ
по
дисциплине «Электропривод»
КУРСК
– 2007
Составили:
профессор Серебровский В.И. преподаватель
Назаренко Ю.В.
Лабораторная
работа №1 ИССЛЕДОВАНИЕ
МЕХАНИЧЕСКИХ ХАРАКТЕРИСТИК ТРЕХФАЗНОГО
АСИНХРОННОГО ЭЛЕКТРОДВИГАТЕЛЯ С ФАЗНЫМ
РОТОРОМ
Цель
работы:
исследовать механические характеристики
трехфазного асинхронного электродвигателя
с фазным ротором при различных
сопротивлениях ротора.
ПРОГРАММА
РАБОТЫ
1.
Ознакомиться с исследуемым двигателем
и оборудованием рабочего места. Записать
номинальные данные двигателя и других
машин, входящих в опытную установку. 2.
Измерить омические сопротивления фазы
статора r1
и фазы ротора rp.
Привести эти сопротивления к расчетной
рабочей температуре 75С. 3.
Измерить сопротивление пускового
реостата Rx
по ступеням. Определить отношение
Rx/rp
для отдельных ступеней. 4.
Рассчитать естественную (Rx
= 0) и одну искусственную механическую
характеристику (при Rx
= 3 rp)
при изменении скольжения от -1 до 2 и
при напряжении Uст
= 127 В. Величину x1
+ x2'
принять по данным лаборатории. 5.
Собрать схему для исследования
механических характеристик асинхронного
двигателя в различных режимах. 6.
Исследовать механические характеристики
n
= f
(М) асинхронного двигателя в двигательном
режиме при различных сопротивлениях
в цепи ротора
(Rx
= (0 …10) rp). 7.
Исследовать механические характеристики
n
= f
(М) асинхронного двигателя в генераторном
режиме при различных сопротивлениях
в цепи ротора
(Rx
= (0 … 10) rp).
Скорость вращения повышать примерно
до 1,5 n. 8.
Исследовать механические характеристики
n
= f
(М) двигателя в режиме противовключения
при сопротивлении в цепи ротора Rx
= 10 rp
и при изменении скорости вращения
ротора от 0 до пс. 9.
Исследовать механические характеристики
n
= f
(М) двигателя в режиме динамического
торможения при возбуждении статора
переменным током. В цепь ротора включить
сопротивление (Rx
= (10… 20) rp).
Скорость вращения ротора изменить от
0 до nс. 10.
Исследовать механические характеристики
двигателя в режиме динамического
торможения при возбуждении статора
постоянным током. В цепь ротора включить
сопротивление (Rx
= (5 …10) rp).
Скорость вращения ротора изменять от
0 до nс. 11.
По данным опытов и расчетов построить
на графике зависимости n
= f
(М) и оформить отчет.
МЕТОДИЧЕСКИЕ
УКАЗАНИЯ
Трехфазные
асинхронные электродвигатели с фазным
ротором применяются там, где требуется
регулировать скорость вращения или
ограничить пусковой ток или пусковой
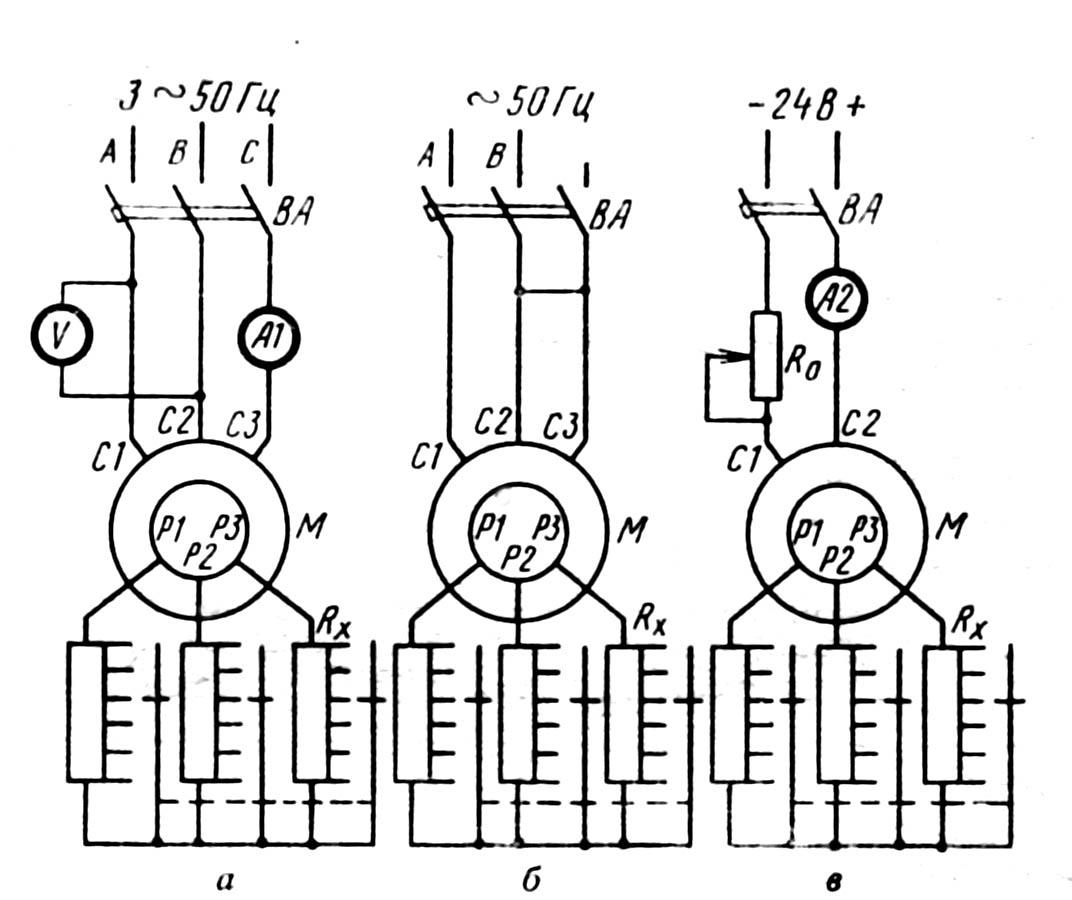
момент. Для этого в цепь ротора включают
регулируемое сопротивление (рис. 1 а). Расчетная
формула для вращающего момента
трехфазного асинхронного электродвигателя
имеет следующий вид:
Максимальный
момент, в свою очередь, определяется
по формуле:
или
Скольжение
при максимальном моменте
В
формулах (1), (2), (3) знак плюс относится
к двигательному режиму, знак минус –
к генераторному. В
формулах (1), (2), (3) Uф
– фазное напряжение, подведенное к
двигателю; wc
– синхронная угловая скорость; r1
– омическое сопротивление фазы статора; r21
–
приведенное активное сопротивление
ротор.
Схемы
включения трехфазного асинхронного
электродвигателя с фазным ротором
а
- при исследовании механических
характеристик в двигательном и
генераторном режимах; б - при
исследовании механических характеристик
в режиме динамического торможения при
возбуждении статора переменным током;
в - то же, но при возбуждении постоянным
током. Рис.
1.
Ec
, Ep
– э. д. с. статора и ротора
r2
= rp
+ Rx
–
полное активное сопротивление фазы
ротора (rp
-
сопротивление фазы ротора, Rx
– добавочное сопротивление в цепи
ротора);
x1
– индуктивное сопротивление фазы
статора; x2
– приведенное индуктивное сопротивление
фазы ротора.
Максимальный
момент не зависит от сопротивления в
цепи ротора, при увеличении этого
сопротивления увеличивается скольжение
при данном моменте. Таким образом,
изменяя активное сопротивление ротора
Rx,
можно получать различные механические
характеристики асинхронного
электродвигателя. Для
асинхронного электродвигателя
осуществимы следующие виды торможения: а)
торможение с рекуперацией энергии в
сеть при увеличении скорости вращения
ротора выше синхронной. Такой вид
торможения применяют для поддержания
скорости привода примерно постоянной; б)
торможение противовключением переменой
направления вращения поля статора.
Этот способ позволяет осуществить
эффективное торможение для остановки
привода; в)
динамическое торможение при возбуждении
переменным током, осуществляемое по
схеме показано на рис. 1 б. При надлежащем
выборе сопротивления в цепи ротора (Rx
~ 10 rp)
можно получить благоприятные тормозные
характеристики; г)
динамическое торможение при возбуждении
статора постоянным током. Статор
подключают к источнику постоянного
тока по схеме, приведенной на рис. 1в. Для
получения наиболее благоприятных
тормозных характеристик необходимо
увеличить сопротивление цепи ротора
примерно в 5-10 раз. Для торможения
двигателей сравнительно небольшой
мощности применяют питание от понижающего
трансформатора и селеновых выпрямителей.
Ток возбуждения дают в 2-3 раза больше,
чем ток холостого хода в трехфазном
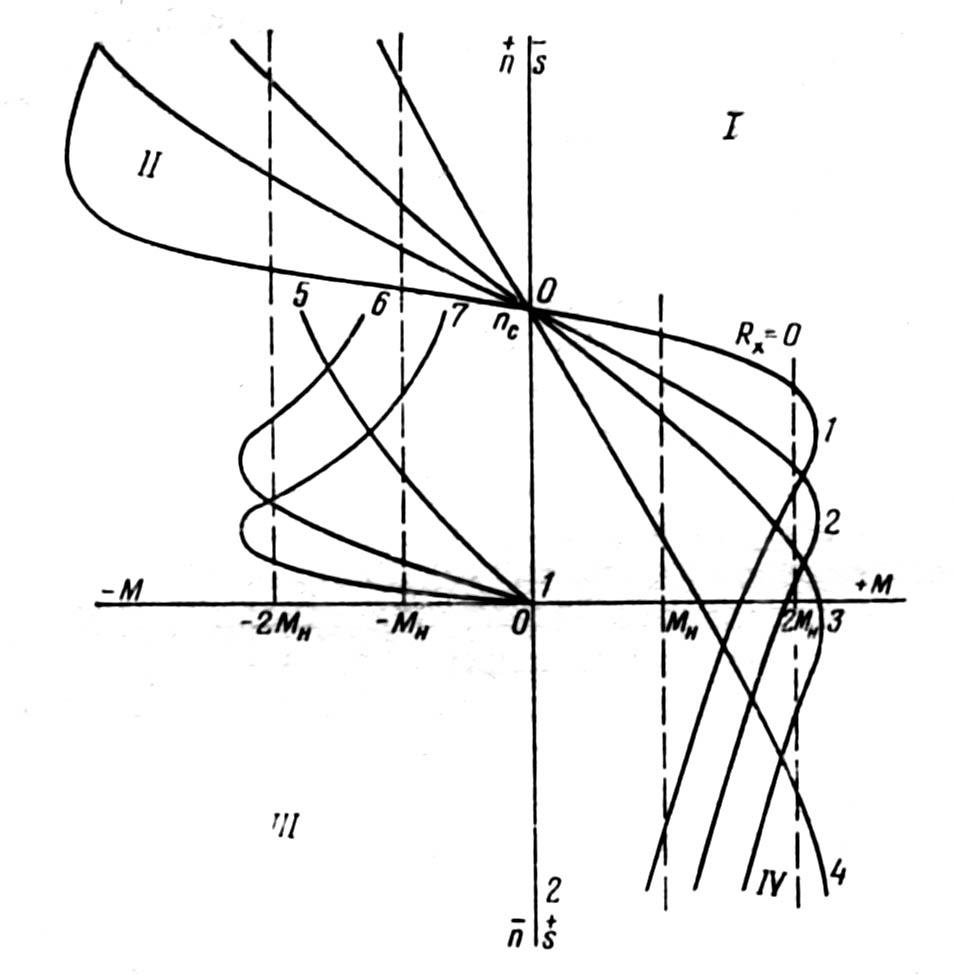
режиме при номинальном напряжении. Примерные
механические характеристики асинхронного
двигателя с фазным ротором показаны
на рис. 2.
Механические
характеристики трехфазного асинхронного
электродвигателя с фазным ротором 1
– естественная; 2,3,4 – искуственные
характеристики; 5 – характеристика
динамического тормажения при возбуждении
статора переменным током; 6,7 –то же, но
при возбуждении статора постоянным
током. Рис.
2.
M
= Cм
(Io
+ I н.м)
(4)
I
н.м
– ток нагрузочной машины; Io
– ток, соответствующий моменту холостого
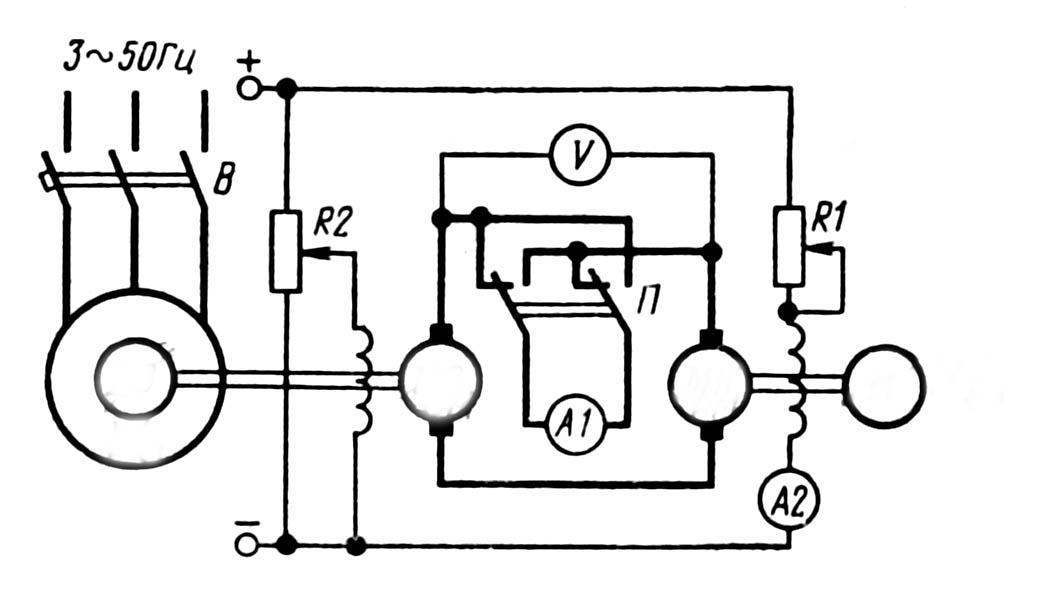
хода. Исследование
механических характеристик асинхронного
электродвигателя с фазным ротором
нужно проводить по методу возвратной
работы по схеме, приведенной на рис. 3.
Схема
нагрузочного агрегата для испытания
электродвигателя в различных режимах
по методу возвратной работы
Рис.
3.
Вращающий
момент исследуемого двигателя определяют
по формуле (4). Скорость вращения измеряют
электротахометром. В
цепь ротора исследуемого двигателя
включают реостат Rx
(рис. 1). Регулирование сопротивления
реостата ступенчатое. Реостат рассчитывают
на длительный режим работы, обычные
пусковые реостаты для этой цели
непригодны. Так как исследуемый двигатель
работает в режимах больших скольжений,
то во избежании перегрева обмоток его
включают на напряжение 127 В при соединении
обмоток статора звездой (при номинальном
напряжении двигателя 380/220 B). Напряжение
на статоре исследуемого двигателя
должно оставаться неизменным. Если в
сети напряжение сильно колеблется или
значительно отличается от номинального,
то питание к двигателю следует подводить
от регулировочного автотрансформатора.
Механические
характеристики асинхронного двигателя
в двигательном режиме исследуют таким
образом (рис. 3). При разомкнутом
переключателе П включают исследуемый
двигатель ИД, затем двигатель ВД.
Установив при номинальной скорости
вращения двигателя Д возбуждение машины
НМ равным номинальному, дают такое
возбуждение машине ВМ, чтобы показания
вольтметра, включенного параллельно
переключателю П, были равны нулю (при
этом Ев.м.
= Ен.м).
После этого включают переключатель П,
постепенно уменьшают возбуждение
машины ВМ (Ев.м.
Ен.м)
и исследуют зависимость Iн.м
= f
(n)
при изменении скорости вращения
исследуемого двигателя от nc
до 0. Опыт проводят при различных
сопротивлениях в цепи ротора (Rx
= 0…10 rp). Для
исследования механических характеристик
двигателя в генераторном режиме
увеличивают скорость вращения ротора
выше синхронной. Для этого после
включения переключателя П постепенно
увеличивают возбуждение машины ВМ
(Ев.м.
Ен.м)
и исследуют зависимость Iн.м
= f
(n)
при изменении скорости вращения от nc
до 1,5 nc
при различных сопротивлениях в цепи
ротора. Механические
характеристики двигателя в режиме
противовключения исследуют при той же
схеме испытательной установки, что и
в предыдущих опытах. При этом меняют
местами два провода на статоре
исследуемого двигателя, а ротор вращают
машиной НМ в прежнем направлении. В
цепь ротора включают сопротивление Rx
= 10 rp.
Опыт начинают при минимальном возбуждении
машины ВМ и замкнутом переключателе
П. При опыте исследуют зависимость Iн.м
= f
(n)
при изменении скорости от 0 до nc.
Опыт нужно проводить быстро во избежании
перегрева двигателя и реостата. Для
исследования механических характеристик
двигателя в режиме динамического
торможения при возбуждении статора
переменным током соединяют обмотки
статора треугольником и присоединяют
к сети, как показано на рис. 1 б. В цепь
ротора включают сопротивление Rx
= 20 rp.
Ротор двигателя вращают нагрузочной
машиной и исследуют зависимость Iн.м
= f
(n)
при изменении скорости от 0 до nc. Для
исследования механических характеристик
двигателя в режиме динамического
торможения при возбуждении статора
постоянным током соединяют обмотки
статора звездой и на два любых вывода
подают постоянный ток величиной I
= 2,5 Ixx
(Ixx
– ток холостого хода фазы статора при
номинальном напряжении) от постороннего
источника. В цепь ротора включают
сопротивление Rx
= (5…10) rp,
вращают ротор нагрузочной машиной и
исследуют зависимость M
= f
(n)
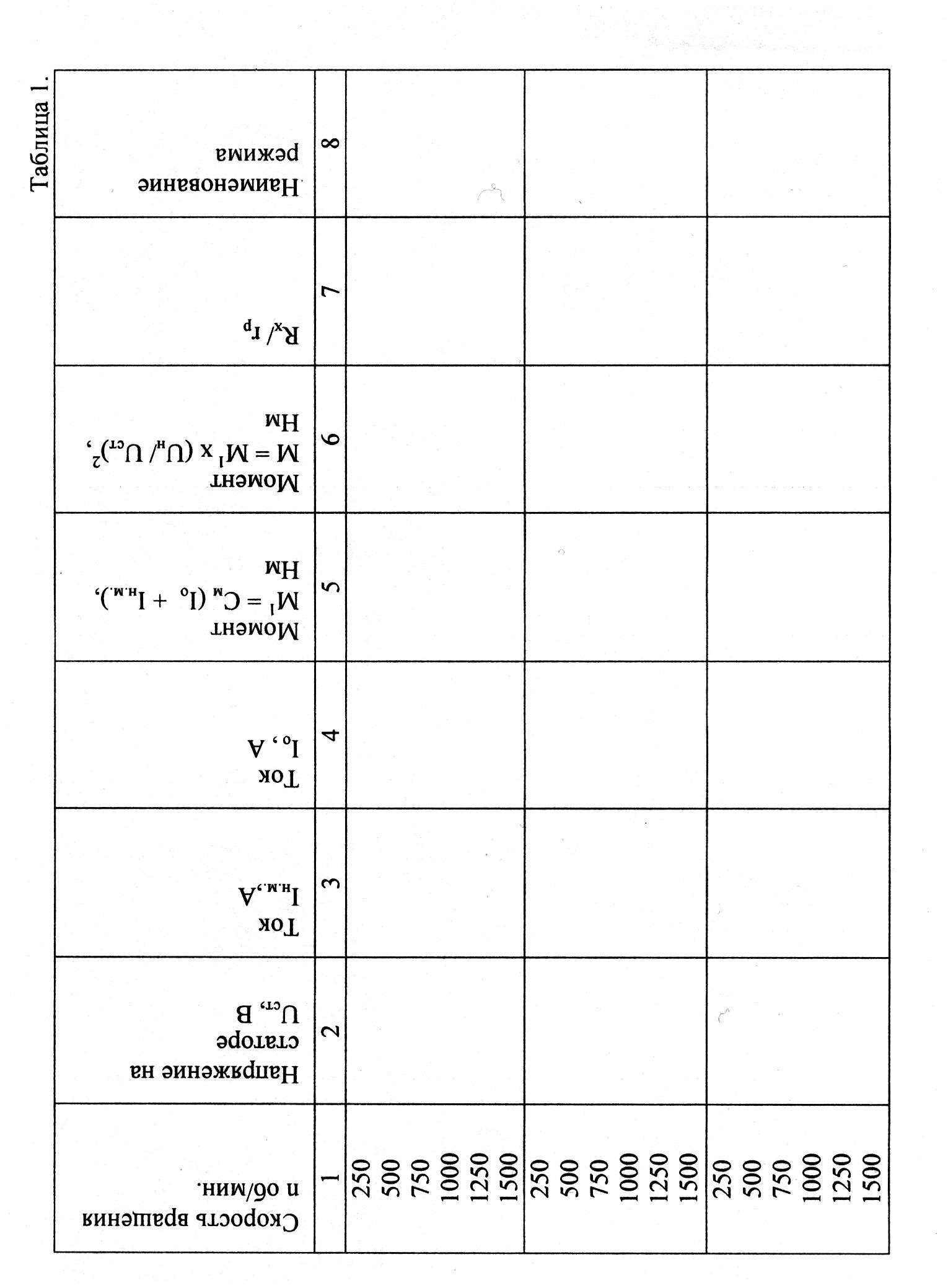
при изменении скорости от 0 до nc. Данные
опытов сводят в таблицу1:
КОНТРОЛЬНЫЕ
ВОПРОСЫ
1.
От чего зависит пусковой ток асинхронного
двигателя, в каких пределах он изменяется
и как влияет на питающую сеть? 2.
Как влияет изменение напряжения на
максимальный вращающий момент двигателя? 3.
Как влияет величина сопротивления
ротора на величину пусковых момента и
тока? 4.
Почему критическое скольжение
увеличивается при введении в цепь
ротора добавочного сопротивления, а
максимальный момент остается при этом
неизменным? 5.
Как изменится критический момент и
скольжение по мере увеличения
сопротивления включенного в цепь
статора?
![]()
![]() Нм
Нм ![]()
 кг
м (1)
кг
м (1) Нм
Нм
 (2)
(2) (3)
(3)
![]()
![]() кгм/А
Cм
= 0,493
кгм/А
Cм
= 0,493![]()

12

11
3
10
4 9
5
8
6 7