

Момент инерции тела. Теорема Гюйгенса-Штейнера. Примеры вычисления моментов инерции тел
Момент инерции тела аддитивная величина, равная сумме моментов инерции всех частиц тела:
![]() .
.
Здесь mi— массаi-той частицы, которую можно связать с плотностью веществаiи объёмом частицы:
mi=iVi.
Тогда
![]() .
.
Если тело однородно, то есть его плотность повсюду одинакова, то можно вынести за знак суммы:
![]() .
.
Разделяя тело на всё более мелкие частицы, сведём задачу отыскания момента инерции к вычислению интеграла:
![]() .
.
Интегрирование проводится по всему объёму тела V.
В качестве примера вычислим момент инерции тонкого однородного стержня относительно оси z, проходящей через его центр масс — точку С (рис. 9.3). Длина стержня —l, его масса —M.
На расстоянии x от оси вращения выделим
элемент dx, масса которогоdm=![]() .
.
0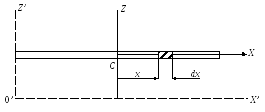
Рис. 9.3
Момент инерции этой частицы стержня равен:
![]() .
.
Вычислив подобным образом, моменты инерции всех элементов стержня, сложим их, взяв интеграл:
 .
.
Таким образом:
Iz=![]() . (9.7)
. (9.7)
Интегрирование проведено по xв
пределах от![]() до
до![]() .
.
Как изменится момент инерции этого стержня, если ось вращения перенести в другое место? Провести её, например, через край стержня?
В этом случае прежний интеграл нужно рассмотреть в пределах от 0 до l:
![]() . (9.8)
. (9.8)
Новое значение момента инерции того же стержня заметно возросло. Связано это с тем, что момент инерции тела определяется не только его массой, но и её распределением относительно оси вращения.
Вычислим момент инерции ещё одного тела: сплошного цилиндра относительно его геометрической оси.

Рис. 9.4
Пусть M— масса, аR— радиус цилиндра (рис. 9.4). Выделим в этом цилиндре цилиндрический слой радиусомrи толщинойdr. Масса этого слоя:
dm=dV=2rdrl,
где: — плотность материала цилиндра;
l— его длина.
Все частицы этого слоя находятся на одинаковом расстоянии от оси вращения — геометрической оси цилиндра, значит, момент инерции слоя равен:
dI = dm r2 = 2r dr l r2.
Для отыскания момента инерции цилиндра проинтегрируем последнее выражение:
![]() .
.
Отметим, что R2l=V— объём цилиндра, аR2l=V=M— его масса.
Тогда момент инерции цилиндра относительно его геометрической оси можно окончательно записать в таком виде:
![]() .
.
Теорема Гюйгенса-Штейнера
Момент инерции тела относительно произвольной оси (I) равен сумме момента инерции Ic относительно оси, параллельной данной и проходящей через центр масс тела, и произведения массы тела М на квадрат расстояния между осями:
I=Ic+Ma2, (9.9)
где а— расстояние между осями.
На рисунке 9.5 оси вращения перпендикулярны плоскости чертежа: через точку 0 проходит произвольная ось; параллельная ей ось проведена через центр масс тела — точку С. Расстояние между осями —а.
Выделим элемент тела массой mi. Его момент инерции относительно оси 0 равен:
![]() . (9.10)
. (9.10)
Как следует из рисунка
![]() ,
откуда:
,
откуда:
![]() . (9.11)
. (9.11)
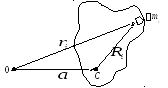
Рис. 9.5
Теперь момент инерции частицы mi(9.10) можно представить такой суммой:
![]() .
.
Для отыскания момента инерции всего тела, нужно сложить моменты инерции всех его частиц:
![]() . (9.12)
. (9.12)
Здесь за знак суммы вынесена постоянная
величина — расстояние между осями а.
Первое слагаемое справа![]() =Ма2, так как
=Ма2, так как![]() =М— масса тела. Второе слагаемое
=М— масса тела. Второе слагаемое![]() =IС— момент инерции тела,
относительно оси, проходящей через
центр масс. Третье слагаемое равно нулю,
так как сумма
=IС— момент инерции тела,
относительно оси, проходящей через
центр масс. Третье слагаемое равно нулю,
так как сумма![]() равна произведению массы тела на вектор
равна произведению массы тела на вектор![]() ,
проведённый от оси С к центру масс тела.
Но ось С проходит через центр масс,
поэтому
,
проведённый от оси С к центру масс тела.
Но ось С проходит через центр масс,
поэтому![]() = 0 и
= 0 и![]() =М
=М![]() = 0.
= 0.
Собрав эти результаты в уравнение (9.12), получим выражение теоремы Гюйгенса-Штейнера:
IO=IC+Ma2.
Эта теорема значительно упрощает задачу вычисления моментов инерции.
Известен, например, момент инерции стержня относительно оси, проходящей через его центр масс (9.7):
![]() .
.
Воспользовавшись теоремой Гюйгенса-Штейнера, легко вычислим момент инерции этого же стержня относительно оси z’, проходящей, например, через край стержня (рис. 9.3):
Iz’=Iz+Ma2,a=l/2.
![]() .
.
Это значение момента инерции совпадает с результатом (9.8), который был получен методом прямого интегрирования.