

Контрольные вопросы
1. Назовите этапы преобразования энергии в гидравлических системах. Перечислите известные Вам устройства и их функциональные назначения, используемые на каждом этапе.
2. Сформулируйте закон Паскаля для гидростатических систем.
3. Какие процессы будут происходить в жидкости в местах уменьшения проходного сечения? Напишите и поясните уравнения непрерывности и уравнение Бернулли.
4. Объясните принцип действия гидроцилиндров, поворотных гидроцилиндров, а также шестеренных и поршневых гидромоторов.
5. Какие гидроаппараты Вы знаете? Назовите их функциональное назначение. Поясните принцип работы.
6. Назовите основной недостаток игольчатого дросселя. Каким образом он устраняется в регуляторах давления?
Глава 3. Преобразователи движения
Передача движения от исполнительного электродвигателя к выходному звену мехатронного модуля может быть обеспечена с помощью различных преобразователей движения (передач), структура и конструктивные особенности которых зависят от типа двигателя, вида перемещения рабочего органа и способа их расположения. Преобразователи движения оказывают существенное влияние на качество работы мехатронного модуля в целом.
При проектировании мехатронных модулей тип преобразователя движения выбирают исходя из сложности его конструкции, к.п.д., люфта в передаче, габаритных размеров, массы, свойств самоторможения, жесткости, удобства компоновки, технологичности, стоимости и др.
3.1. Назначение и классификация преобразователей движения
Преобразователи движения предназначены для преобразования одного вида движения в другое, согласования скоростей и вращающих моментов двигателя и рабочего органа. Для преобразования движения используют зубчатые, червячные, цепные, ременные и фрикционные передачи, а также передачи винт-гайка (рис. 3.1). В связи с тем, что угловая скорость вращения электродвигателей, как правило, на много выше скоростей рабочих органов мехатронных модулей, то в преобразователях движения применяются понижающие передачи.

Рис. 3.1. Классификация механических передач
преобразователей движения
3.2. Зубчатые передачи
Наиболее распространенными преобразователями движения являются зубчатые передачи – механизмы, передающие или преобразующие движение с помощью зацепления с изменением угловых скоростей и моментов. Такие передачи применяют для преобразования вращательного движения между валами с параллельными (рис. 3.2, а-г), пересекающимися (рис. 3.2, е-з) осями, а также для преобразования вращательного движения в поступательное, и наоборот (рис. 3.2, д).

Рис. 3.2. Основные виды зубчатых передач:
а – цилиндрическая с прямыми зубьями; б – цилиндрическая с косыми зубьями; в – цилиндрическая с шевронными зубьями; г – цилиндрическая внутреннего зацепления с прямыми зубьями; д - реечная передача; е – коническая с прямыми зубьями; ж – коническая с тангенциальными зубьями; з – коническая с круговыми зубьями;
Кинематическая схема цилиндрической и конической передач приведены на рис. 3.3. Передаточное соотношение может быть найдено из соотношения числа зубьев входной z1 и выходной z2 шестерен
![]() .
(3.1)
.
(3.1)
Основными
характеристиками механических передач
являются мощности на валах
![]() и
и![]() вВт,
угловые скорости
вВт,
угловые скорости
![]() и
и![]() вс-1,
(или частота вращения
вс-1,
(или частота вращения
![]() и
и![]() вмин-1),
моменты сил
вмин-1),
моменты сил
![]() и
и![]() в
в![]() ,
передаточное соотношение
,
передаточное соотношение![]() и к.п.д.
и к.п.д.![]() .
Выражения, описывающие взаимосвязи
основных характеристик зубчатых передач
имеют вид
.
Выражения, описывающие взаимосвязи
основных характеристик зубчатых передач
имеют вид
![]()
или
![]() и
и![]() ,
(3.2)
,
(3.2)
![]() ,
(3.3)
,
(3.3)
![]() или
или
![]() ,
(3.4)
,
(3.4)
![]() и
и
![]() ,
(3.5)
,
(3.5)
![]()
или
при выделении момента потерь в передаче
в виде
![]()
![]() .
(3.6)
.
(3.6)
Также
следует отметить, что приведение моментов
инерции элемента мехатронного модуля,
вращающегося со скоростью
![]() или поступательно движущегося со
скоростью
или поступательно движущегося со
скоростью![]() ,
к скорости
,
к скорости![]() может быть выполнено на основании закона
сохранения кинетической энергии
может быть выполнено на основании закона
сохранения кинетической энергии
![]() или
или
![]() (3.7)
(3.7)
в соответствии с выражением
![]() или
или
![]() ,
(3.8)
,
(3.8)
где
![]() – масса поступательно движущегося
тела;
– масса поступательно движущегося
тела;![]() – радиус приведения к валу со скоростью
– радиус приведения к валу со скоростью![]()
![]() .
(3.9)
.
(3.9)
Для реечной передачи, при преобразовании вращательного движения в поступательное, линейная скорость рейки определится как
![]() ,
,
![]() ,
(3.10)
,
(3.10)
передаточное соотношение
![]() ,
,
![]() ,
(3.11)
,
(3.11)
где
![]() – диаметр шестерни вмм.
– диаметр шестерни вмм.
Передаточное соотношение реечной передачи может находиться в диапазоне 10…200 м-1. К.п.д. цилиндрических передач составляет 0,95…0,99.
Н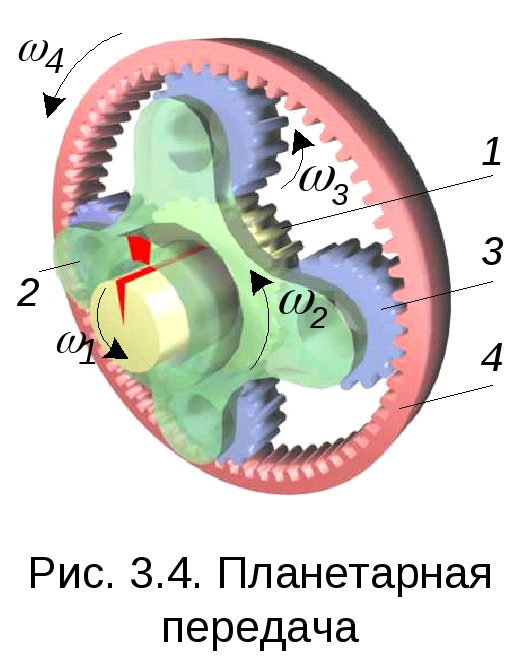 а
рис. 3.4 приведена схема планетарной
передачи. Планетарными называют зубчатые
передачи, в которых геометрическая ось
хотя бы одной шестерни подвижна. Основными
элементами планетарной передачи
являются:
а
рис. 3.4 приведена схема планетарной
передачи. Планетарными называют зубчатые
передачи, в которых геометрическая ось
хотя бы одной шестерни подвижна. Основными
элементами планетарной передачи
являются:
- солнечная шестерня 1 (находится в центре);
- водило 2, жёстко фиксирующее друг относительно друга оси нескольких планетарных шестерён одинакового размера 3 (сателлитов), находящихся в зацеплении с солнечной шестерней;
- кольцевая шестерня 4 (эпицикл), имеющая внутреннее зацепление с планетарными шестернями.
При использовании планетарной передачи в качестве редуктора один из трёх её основных элементов фиксируется неподвижно, другой элемент используется как ведущий, а третий – в качестве ведомого.
В
случае, когда водило 2
зафиксировано (![]() ),
а мощность подводится через солнечную
шестерню1,
планетарные шестерни 3
будут вращаться на месте со скоростью,
определяемой отношением числа их зубьев
),
а мощность подводится через солнечную
шестерню1,
планетарные шестерни 3
будут вращаться на месте со скоростью,
определяемой отношением числа их зубьев
![]() относительно солнечной шестерни
относительно солнечной шестерни
![]()
![]() .
.
Вращение
планетарных шестерён 3
передается кольцевой шестерне 4.
Если кольцевая шестерня имеет
![]() зубьев, то она будет вращаться со
скоростью
зубьев, то она будет вращаться со
скоростью
![]() .
.
В итоге, если водило заблокировано, то общее передаточное отношение системы будет равно
![]() .
(3.12)
.
(3.12)
В
случае, если закреплена кольцевая
шестерня (![]() ),
а мощность подводится к водилу, то
передаточное отношение на солнечную
шестерню будет больше единицы и составит
),
а мощность подводится к водилу, то
передаточное отношение на солнечную
шестерню будет больше единицы и составит
![]() .
(3.13)
.
(3.13)
Наиболее широкое применение планетарные передачи нашли в автомобильных дифференциалах и в суммирующих звеньях кинематических схем металлорежущих станков. В современных устройствах могут использоваться каскады из нескольких планетарных передач для получения большого диапазона передаточных чисел. На этом принципе работают многие автоматические коробки передач автомобилей.
Достоинствами планетарных передач по сравнению с обычными цилиндрическими или коническими передачами являются меньшие габариты и масса. Недостатками – повышенная точность изготовления, большее число подшипников качения.
Д ля
получения больших передаточных чисел
(до 90000) применяют волновые передачи
(см. рис. 3.5). Волновая передача состоит
из жесткого неподвижного элемента –
зубчатого колеса1
с внутренними зубьями, неподвижного
относительно корпуса передачи; гибкого
элемента – тонкостенного упругого
зубчатого колеса с наружными зубьями
2,
соединенного с выходным валом; генератора
волн – кулачка 3,
эксцентрика или другого механизма,
растягивающего гибкий элемент до
образования в двух (или более) точках
пар зацепления с неподвижным элементом.
Число зубьев гибкого колеса несколько
меньше числа зубьев неподвижного
элемента.
ля
получения больших передаточных чисел
(до 90000) применяют волновые передачи
(см. рис. 3.5). Волновая передача состоит
из жесткого неподвижного элемента –
зубчатого колеса1
с внутренними зубьями, неподвижного
относительно корпуса передачи; гибкого
элемента – тонкостенного упругого
зубчатого колеса с наружными зубьями
2,
соединенного с выходным валом; генератора
волн – кулачка 3,
эксцентрика или другого механизма,
растягивающего гибкий элемент до
образования в двух (или более) точках
пар зацепления с неподвижным элементом.
Число зубьев гибкого колеса несколько
меньше числа зубьев неподвижного
элемента.
Принцип работы волновой зубчатой передачи проиллюстрирован на рис. 3.6. Например, при числе зубьев гибкого колеса 200, а неподвижного элемента – 202 и двухволновой передаче (два выступа на генераторе волн) при вращении генератора по часовой стрелке первый зуб гибкого колеса будет входить в первую впадину жёсткого, второй во вторую и т.д. до двухсотого зуба и двухсотой впадины. На следующем обороте первый зуб гибкого колеса войдёт в двести первую впадину, второй – в двести вторую, а третий – в первую впадину жёсткого колеса. Таким образом, за один полный оборот генератора волн гибкое колесо сместится относительно жёсткого всего на 2 зуба.

Передаточное соотношение волновой передачи от вала генератора волн к валу гибкого колеса равно
![]() ,
(3.14)
,
(3.14)
где
![]() ,
,![]() – соответственно число зубьев жесткого
и гибкого зубчатых колес.
– соответственно число зубьев жесткого
и гибкого зубчатых колес.
Основной недостаток таких редукторов – низкий к.п.д. (не более 70…80%), а также высокие требования к точности изготовления и свойствам применяемых материалов.