

Вопрос 2. Графы. Способы задания графов.
Теория графов – это раздел дискретной математики, исследующий свойства конечных множеств с заданными отношениями между их элементами. Как прикладная дисциплина теория графов позволяет описывать и исследовать многие технические, экономические, биологические и социальные системы.
Графы возникли в восемнадцатом столетии, когда известный математик, Леонард Эйлер, пытался решить теперь уже классическую задачу о Кенигсбергских мостах. В то время в городе Кенигсберге было два острова, соединенных семью мостами с берегами реки Преголь и друг с другом так, как показано на рисунке 1.

Рисунок 1
Задача
состоит в следующем: осуществить прогулку
по городу таким образом, чтобы, пройдя
ровно по одному разу по каждому мосту,
вернуться в то же место, откуда начиналась
прогулка. Решая эту задачу, Эйлер
изобразил Кенигсберг в виде графа
(рисунок 2), отождествив его вершины с
частями города, а ребра — с мостами,
которыми связаны эти части.
Рисунок 2
Эйлеру удалось доказать, что искомого пути обхода города не существует.
Математически графом G(V, E) называют совокупность двух множеств: непустого множества V – множества вершин и множества Е – пар элементов из V. Например, G(V, E) V = {a, b, c, d}, E = {(a, b), (a, c),(a, d), (d, c)}.
Если
элементы множества Е
не упорядочены, то они называются
ребрами,
а граф – неориентированным.
Если же элементы множества Е
упорядочены, то они называются дугами,
а граф – ориентированным
или орграфом.
Граф называется смешанным,
если его вершины соединяются, как
ребрами, так и дугами. Говорят, что ребро
 соединяет вершины
соединяет вершины и
и ,
а дуга
,
а дуга начинается в вершине
начинается в вершине и заканчивается в вершине
и заканчивается в вершине (исходит из вершины
(исходит из вершины и заходит в вершину
и заходит в вершину ).
).
На бумаге или экранах ЭВМ вершины графа изображаются точками или кружками, ребра – линиями, дуги – линиями со стрелками, где стрелка указывает на вторую вершину в упорядоченной паре вершин.
Орграф
называется симметрическим,
если для любой дуги
 из
множестваЕ
дуга
из
множестваЕ
дуга
 также принадлежит множествуЕ.
И антисимметрическим,
если для любой дуги
также принадлежит множествуЕ.
И антисимметрическим,
если для любой дуги
 из множестваЕ
дуга
из множестваЕ
дуга
 не принадлежит множествуЕ.
Любой симметрический орграф можно
рассматривать как неориентированный
граф, в котором каждому ребру соответствует
пара симметрических дуг орграфа.
не принадлежит множествуЕ.
Любой симметрический орграф можно
рассматривать как неориентированный
граф, в котором каждому ребру соответствует
пара симметрических дуг орграфа.
В
неориентированном графе вершины,
являющиеся концевыми точками одного
ребра, называются смежными
вершинами.
В орграфе вершина
 является
смежной с вершиной
является
смежной с вершиной ,
если есть дуга, исходящая из
,
если есть дуга, исходящая из и входящая в
и входящая в .
.
При этом смежные вершины инцидентны этому ребру (дуге), также как и ребро (дуга) инцидентно этим вершинам.
2 ребра называются смежными, если они инцидентны одной и той же вершине графа. Ребра, инцидентные одной и той же паре вершин, называются кратными ребрами. 2 дуги называются смежными, если конечная вершина одной дуги является начальной вершиной другой дуги.
Ребро (дуга), начинающееся и заканчивающееся в одной вершине, называются петлей.
Число ребер, инцидентных вершине неориентированного графа Vi, называется степенью или валентностью вершины Vi и обозначается ρ(Vi).
Для вершины Vi ориентированного графа определяют полустепень исхода ρ(Vi>) как количество дуг, исходящих из этой вершины, и полустепень захода ρ(Vi<) как количество дуг, входящих в эту вершину. Степенью вершины орграфа Vi называется сумма ее полустепеней исхода и захода.
ρ(Vi)= ρ(Vi>)+ ρ(Vi<)
Вершина степени 1 называется висячей, а степени 0 – изолированной.
Путь в графе – последовательность вершин Vi, в которой 2 любые соседние вершины соединены, по крайней мере, одним ребром (дугой).
Путь формирует цикл, если начальная и конечная вершина пути совпадают.
Контур – это цикл без повторения вершин, за исключением первой вершины, совпадающей с последней.
Существует несколько способов матричного задания графов:
Матрица смежности вершин
Матрица смежности ребер (дуг)
Матрица инцидентности.
Матрица смежности вершин одинаково определяется для ориентированного и неориентированного графов. Матрица смежности вершин – это квадратная матрица А порядка n, где n – число вершин, элементы которой задаются по формуле:
 ,
,
где
k
– количество ребер, соединяющих вершины
 или количество дуг, идущих из вершины
или количество дуг, идущих из вершины в вершину
в вершину для орграфа.
для орграфа.
В случае неориентированного графа матрица смежности вершин является симметрической. Верно и обратное: любая симметрическая матрица с неотрицательными элементами может быть интерпретирована как граф.
Матрица смежности ребер (дуг) – это квадратная матрица А порядка m, где m – число ребер (дуг), элементы которой задаются по формуле:
 ,
,
где
k
– количество ребер, соединяющих вершины
 или количество дуг, идущих из вершины
или количество дуг, идущих из вершины в вершину
в вершину для орграфа.
для орграфа.
Матрица инцидентности ориентированного графа – это прямоугольная матрица А порядка n×m, где n – число вершин, m – число дуг, элементы которой задаются по формуле:
где
k
–количество дуг, идущих из вершины
 в вершину
в вершину для орграфа.
для орграфа.
Матрица инцидентности неориентированного графа – это прямоугольная матрица А порядка n×m, где n – число вершин, m – число ребер, элементы которой задаются по формуле:

где
k
– количество ребер, соединяющих вершины
 .
.
Пример 1. Представить ориентированный граф на рисунке 3 в виде матриц смежности вершин и дуг и матрицы инцидентности.

Рисунок 3
Матрица смежности вершин для графа на рисунке 3
|
|
1 |
2 |
3 |
4 |
|
1 |
0 |
0 |
0 |
1 |
|
2 |
0 |
0 |
0 |
0 |
|
3 |
0 |
1 |
0 |
0 |
|
4 |
0 |
1 |
1 |
0 |
Матрица смежности дуг для графа на рисунке 3
|
|
(1,4) |
(3,2) |
(4,2) |
(4,3) |
|
(1,4) |
0 |
0 |
1 |
1 |
|
(3,2) |
0 |
0 |
0 |
0 |
|
(4,2) |
0 |
0 |
0 |
0 |
|
(4,3) |
0 |
1 |
0 |
0 |
Матрица инцидентности для графа на рисунке 3
|
|
(1,4) |
(3,2) |
(4,2) |
(4,3) |
|
1 |
1 |
0 |
0 |
0 |
|
2 |
0 |
–1 |
–1 |
0 |
|
3 |
0 |
1 |
0 |
–1 |
|
4 |
–1 |
0 |
1 |
1 |
Пример 2. Представить неориентированный граф на рисунке 4 в виде матриц смежности вершин и ребер и матрицы инцидентности.
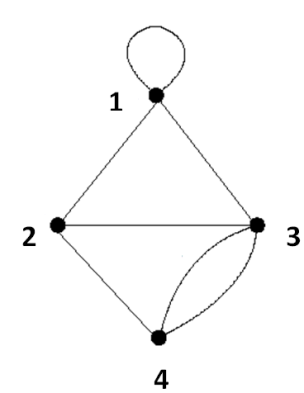
Рисунок 4
Матрица смежности вершин для графа на рисунке 4
|
|
1 |
2 |
3 |
4 |
|
1 |
1 |
1 |
1 |
0 |
|
2 |
1 |
0 |
1 |
1 |
|
3 |
1 |
1 |
0 |
2 |
|
4 |
0 |
1 |
2 |
0 |
Матрица смежности ребер для графа на рисунке 4
|
|
(1,1) |
(1,2) |
(1,3) |
(2,3) |
(2,4) |
(3,4) |
|
(1,1) |
1 |
1 |
1 |
0 |
0 |
0 |
|
(1,2) |
1 |
1 |
1 |
1 |
1 |
0 |
|
(1,3) |
1 |
1 |
1 |
1 |
0 |
1 |
|
(2,3) |
0 |
1 |
1 |
1 |
1 |
1 |
|
(2,4) |
0 |
1 |
0 |
1 |
1 |
1 |
|
(3,4) |
0 |
0 |
1 |
1 |
1 |
2 |
Матрица инцидентности для графа на рисунке 4
|
|
(1,1) |
(1,2) |
(1,3) |
(2,3) |
(2,4) |
(3,4) |
|
1 |
1 |
1 |
1 |
0 |
0 |
0 |
|
2 |
0 |
1 |
0 |
1 |
1 |
0 |
|
3 |
0 |
0 |
1 |
1 |
0 |
2 |
|
4 |
0 |
0 |
0 |
0 |
1 |
2 |