3.13. (Анфиса Ермолаева) Исполнительные механизмы систем автоматического регулирования.
Исполнительное устройство – устройство автоматической системы управления, воздействующее на технологический процесс в соответствии с полученным от управляющего устройства командным сигналом. Исполнительное устройство содержит, как правило, несколько функциональных блоков: усилитель мощности; исполнительный механизм; регулирующий орган; датчик положения; блок обратной связи; блок сигнализации крайних положений; блок ручного управления.
Исполнительный механизм (ИМ) предназначен для усиления мощности командного сигнала, получаемого от регулятора, и воздействия на регулирующий орган. По виду используемой энергии ИМ делят на электрические, пневматические, гидравлические.
Пневматические исполнительные механизмы
ПЛЮСЫ ИСПОЛЬЗОВАНИЯ: просты; надежны; удобны в эксплуатации; взрыво- и пожаробезопасны (поэтому широко применяются в химической промышленности); обладают высоким быстродействием и точностью позиционирования при умеренном перестановочном усилии и небольших габаритах. МИНУСЫ ИСПОЛЬЗОВАНИЯ: для обеспечения давления сжатого воздуха необходима компрессионная станция (что означает дополнительные затраты), работают только на малые расстояния (до 200 м).
Входной сигнал пневматических исполнительных механизмов – давление сжатого воздуха (0,02...0,1 МПа), соответствующее командному сигналу регулятора.
Пневматические ИМ можно использовать в комплекте не только с пневматическими регуляторами, но и с регуляторами, формирующими электрический командный сигнал с использованием электропневмопреобразователя для преобразования электрического сигнала в пневматический.
Пневматические ИМ в зависимости от вида чувствительного элемента, воспринимающего энергию сжатого воздуха на мембранные, поршневые, сильфонные и лопастные. Наиболее часто применяют первые два.

Мембранные исполнительные механизмы (МИМ) (а).
УСТРОЙСТВО: Прорезиненная мембрана 3 с жестким металлическим центром зажата между двумя фланцами, разделяя пространство МИМ на две полости. Жесткий центр мембраны связан со штоком 1. Под мембраной расположена противодействующая пружина 2. ПРИНЦИП РАБОТЫ: Командный сигнал подается в рабочую полость над мембраной, создавая усилие Fx=Арк. Под действием усилия мембрана вместе со штоком перемещается вниз. Пружина сжимается, создавая уравновешивающее усилие пропорционально перемещению штока ИМ Fy=ch. В статическом режиме перемещение штока ИМ пропорционально командному сигналу Fx=Fy, => h=(A/c)pк. Следовательно, командный сигнал можно использовать в качестве сигнала, определяющего положение регулирующего органа. Статическая характеристика, связывающая величину командного давления с положением штока во всем диапазоне его перемещения, называется ходовой характеристикой ИМ. Шток исполнительного механизма соединен со штоком регулирующего органа. С увеличением давления воздуха в полости над мембраной 3 шток 1 вместе с затвором 4 движется вниз и уменьшает проходное сечение клапана, что снижает расход рабочей среды. При уменьшении давления воздуха затвор за счет упругих сил пружины 2 приподнимается, и клапан открывается.
В зависимости от направления движения штока различают мембранные исполнительные механизмы прямого действия - при повышении давления в рабочей полости шток удаляется от плоскости заделки мембраны - и обратного действия - шток приближается.
Для повышения точности и быстродействия пневматических ИУ при работе в тяжелых условиях их снабжают позиционерами устройствами, служащими для усиления мощности пневматического сигнала и обеспечения строгой пропорциональности между перемещением штока ИМ и давлением рк, соответствующем командному сигналу регулятора. Это своеобразные усилители с обратной связью по положению штока.
Поршневые ИМ (б).
УСТРОЙСТВО: схожее с мембранными, отличаются большим конструктивным разнообразием и применяются в тех случаях, когда требуются большой ход штока и большие перестановочные усилия. ПРИНЦИП РАБОТЫ: в поршневой исполнительный механизм управляющий сигнал в виде давления сжатого воздуха подается в цилиндр и перемещает поршень 7, шток которого соединен с РО.
Гидравлические исполнительные механизмы
Входной сигнал гидравлических исполнительных механизмов – давление масла, соответствующее командному сигналу регулятора.
ПЛЮСЫ: просты, надежны, большие перестановочные усилия h, точные перемещения исполнительного устройства. МИНУСЫ: необходимость в дополнительной системе трубопроводов для подачи масла, течи масла, необходимость применения мощных насосов.
Выпускаются два типа гидравлических исполнительных механизмов: прямого хода (с поступательным движением штока) и кривошипные (с поворотным устройством).
Поршневые
исполнительные механизмы прямого хода
состоят из цилиндра с поршнем. ПРИНЦИП
ДЕЙСТВИЯ: Масло под высоким давлением
подается в цилиндр и перемещает поршень,
шток которого соединен со штоком РО.
Входным сигналом поршневого ИМ,
соответствующим командному сигналу
регулятора, является объемный расход
масла Т7, а выходным — перемещение штока
h. Взаимосвязь между ними выражается
уравнением:
 где
А — площадь поперечного сечения
цилиндра. Поршневой гидравлический ИМ
является интегрирующим звеном.
где
А — площадь поперечного сечения
цилиндра. Поршневой гидравлический ИМ
является интегрирующим звеном.
Поршневые кривошипные исполнительные механизмы представляют собой соединение штока с кривошипом. Они управляют поворотными (заслоночными) регулирующими органами.
Пневматические и гидравлические ИМ обладают рядом преимуществ перед электрическими ИМ: высокой надежностью, большим ресурсом работы, большей скоростью работы, возможностью плавного изменения выходных параметров, простотой преобразования энергии потока жидкости или газа в механическую мощность на выходе ИМ, устойчивостью к вибрации, меньшей стоимостью.
Электрические исполнительные механизмы
ПЛЮСЫ: устройства данного типа создают большие перестановочные усилия, монтируются на большом расстоянии от пульта управления, обеспечивают практически любой ход плунжера.
МИНУСЫ: энергоемкость, сложность обслуживания, высокая стоимость, пожаро- и взрывоопасность, громоздкость, высокая потребляемая мощность, ниже скорость работы. Работают в комплекте с электрическими регуляторами.
Различают следующие виды электрических ИМ: электродвигательные и электромагнитные.
Электродвигательные ИМ.
УСТРОЙСТВО: электродвигатель (постоянной скорости/ переменной скорости или шаговой), редуктор с ручным дублером, контрольно-пусковая аппаратура (указатель положения, датчик положения), приставка, формирующая перемещение выходного вала.
Наибольшее распространение получили электрические ИМ постоянной скорости, что обусловлено использованием простых и надежных электродвигателей, для управления которыми применяются простые и экономичные усилители мощности. В качестве электропривода применяют асинхронные трехфазные двигатели или асинхронные однофазные двигатели с полым ротором и ротором типа «беличье колесо» (в). В таких ИМ ротор электродвигателя имеет постоянную мгновенную скорость вращения, а требуемый закон перемещения затвора регулирующего органа обеспечивается за счет повторно-кратковременного включения электродвигателя и соответствующего соотношения между длительностями включенного и выключенного состояний.
Электромагнитные ИМ.
В электромагнитных ИМ усилие, необходимое для перестановки затвора РО, создается электромагнитом (г). ПРИНЦИП ДЕЙСТВИЯ: по катушке электромагнита 1 протекает ток, сердечник 2, соединенный с затвором РО (регулирующего устройства), втягивается в электромагнит (индукционную катушку), открывая проход для рабочей среды. Если ток в катушке электромагнита отсутствует, пружина 3 выталкивает сердечник из электромагнита, и затвор РО перекрывает проход для рабочей среды. Электромагнитные ИМ применяются в основном в системах двухпозиционного регулирования и в системах защиты и блокировки, так как затвор регулирующего органа может занимать только два крайних положения (открыто-закрыто) - т.е. работает только в качестве реле. При установке электромагнитных ИМ на трубопроводах для жидкостей следует иметь в виду, что их практически мгновенное действие приводит к гидравлическим ударам.
3.14. (Юлия Кирпаль)Регулирующие органы /РО/ САР: конструкция, характеристики, свойства.
РО действует на объект управления для поддержания заданного значения регулируемой величины или ее изменения. Различаются по непрерывности воздействия на расход среды, по конструкции, по материалам, размерам, пропускным характеристикам и области применения.
У становка
РО: на
прямолинейных участках трубопровода,
предусматривая байпасную линии.
становка
РО: на
прямолинейных участках трубопровода,
предусматривая байпасную линии.
Непрерывное регулирование расхода жидкости/газов изменением проходного сечения - дроссельные РО; изменением напора - приводы с регулируемой угловой скоростью. Регулирование расхода сыпучих материалов - питатели (шнековые, дисковые и т.д.)
Характеристики РО разделяют на группы: 1) параметры, определяющие работоспособность РО в условиях эксплуатации; 2) параметры для расчета статической характеристики РО;
Условное давление py (наибольшее допустимое давление среды на РО при рабочей температуре), диаметр условного прохода Dy (внутренний диаметр сечения в месте присоединения РО к трубопроводу), допустимая температура среды, перепад давления (усилия, на которые рассчитаны детали подвижных механизмов и дроссельные поверхности).
Пропускная способность; условная пропускная способность (номинальная способность при полностью открытом РО); относительная протечка в затворе; конструктивная характеристика (зависимость проходного сечения от перемещения затвора); пропускная характеристика (зависимость пропускной способности от перемещения затвора) линейная и равнопроцентная; расходная характеристика теоретическая (зависимость между расходом среды и положением затвора при постоянном перепаде давления) и рабочая (то же, при действительном перепаде).
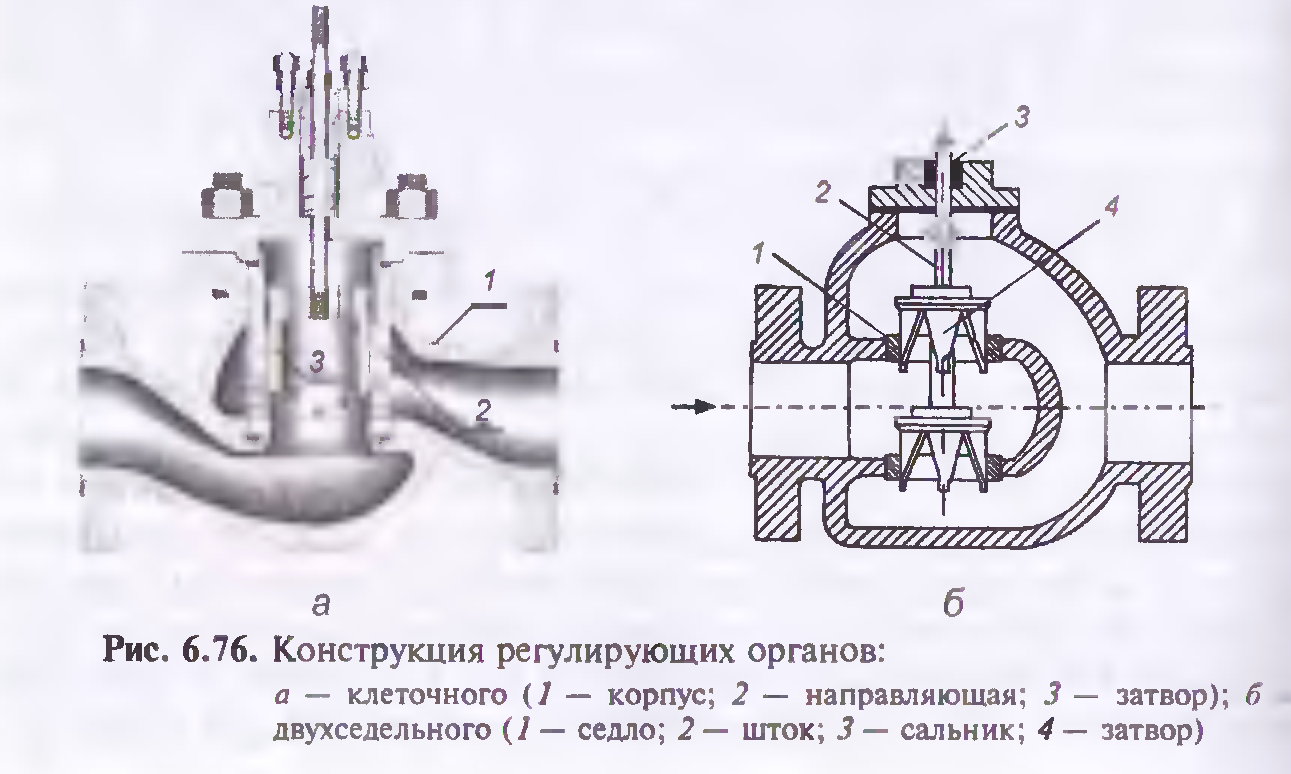
Конструкции дроссельных РО
-регулирующие клапаны прямого (опускание затвора уменьшает проход) и обратного (наоборот) действия
-плунжерный (одно-, двухседельные, клеточные, трехходовые), бесплунжерный (шланговый, диафрагменный), с поворотным механизмом (шаровые и поворотные заслонки)
-одно-, двухседельные - по числу затворов

3.15. (Юлия Розанова)Классификация и характеристики регулирующих органов САР.
3.16. (Светлана Грачёва)Определение статической ошибки регулирования экспериментально и по математической модели САУ (по каналам возмущающего и задающего воздействий).