

4.3 Оборудование асинхронного объединения
ЦИФРОВЫХ ПОТОКОВ
Запоминающее устройство. В запоминающем устройстве (рис. 7) информационные символы через ячейки И записываются в ячейки памяти Я1-ЯL. Процессом записи управляет распределитель записи, работающий с частотой fз, равной тактовой частоте поступающих информационных сигналов (fз=fт). Считывание осуществляется импульсными последовательностями с соответствующих выходов распределителя считывания, который управляется сигналом от ГОпер аппаратуры объединения цифровых потоков. Информация, считанная с ячеек Я1-ЯL, объединяется логическим элементом ИЛИ.
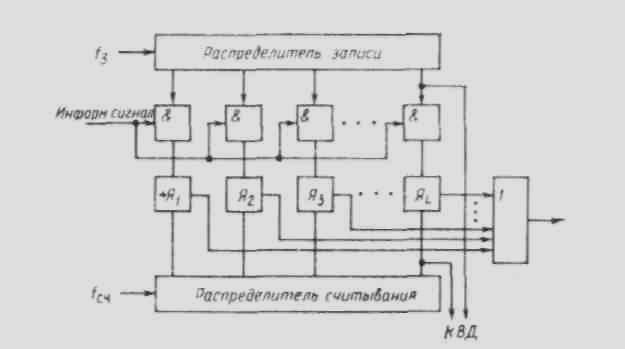
Рис. 7 Структурная схема запоминающего устройства
 Число
ячеек памяти выбирается таким, чтобы
момент считывания всегда отставал
от момента записи.
Число
ячеек памяти выбирается таким, чтобы
момент считывания всегда отставал
от момента записи.
Число ячеек памяти зависит от количества следующих подряд служебных символов в цикле передачи, относящихся к одному цифровому потоку. Служебные символы передаются на импульсных позициях временных сдвигов, которые, в свою очередь, организуются путем запрета считывания информации в соответствующие моменты времени. Однако информационные символы продолжают поступать на вход ЗУ, поэтому должно быть предусмотрено соответствующее число дополнительных ячеек памяти. Для уменьшения числа ячеек памяти ЗУ желательно, чтобы служебные символы были равномерно рассредоточены в цикле передачи. Но в некоторых случаях, например при передаче синхросигнала, целесообразно формировать сосредоточенные служебные символы. Так, во вторичной ЦСП сосредоточиваются восемь служебных символов подряд — по два на каждый цифровой поток, а в третичной и четверичной ЦСП— 12 служебных символов (по три на каждый цифровой поток).
Обычно в зависимости от особенностей построения цикла передачи (структуры и распределения символов синхросигнала) минимально необходимое число ячеек памяти составляет от пяти до восьми.
К выходам L распределителей записи и считывания подключается ВД. Номер выходов распределителей и общее число выходов, используемых в работе ВД, определяются числом ячеек памяти ЗУ и схемой работы ВД.
Временной детектор. Временные интервалы между моментами записи и считывания контролируются ВД. В оборудовании временного группообразования используются цифровой и аналоговый временные детекторы.
Цифровой детектор применяется в передающей части для определения момента возникновения неоднородности. В системах с двусторонним согласованием скоростей ВД должен не только обнаруживать моменты возникновения неоднородности, но и определять ее знак.
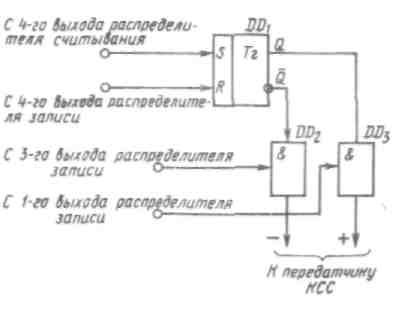
Рис. 8 Цифровой временной детектор
В цифровом детекторе (рис.8) одноименные выходы распределителей записи и считывания подключены к выходам триггера DD1. Выходы триггера соединены с логическими элементами DD2 и DD3, на другие входы которых подаются контрольные импульсные последовательности с распределителя записи. Временное положение контрольных последовательностей выбирается таким образом, чтобы при нормальном режиме работы ЗУ на схемах И импульсы с триггера не совпадали по времени с контрольными импульсами. Если временной интервал между импульсами записи и считывания достиг величины, при которой необходимо согласование скоростей, на выходе соответствующей ячейки И появится импульс, который поступит в передатчик КСС.
На рис.9 показаны временные диаграммы, иллюстрирующие работу цифрового ВД. При рассмотрении работы ВД примем число ячеек памяти в ЗУ равным четырем, тогда на вход 5 триггера будет подаваться сигнал с 4-го выхода распределителя считывания, на вход R — сигнал с 4-го выхода распределителя записи, на схему DD2 — сигнал с 3-го выхода распределителя записи, на схему DD3 — сигнал с 1-го выхода распределителя записи.

Рис. 9 Диаграммы работы цифрового временного детектора:
а — при отсутствии согласования скоростей; б — при отрицательном согласовании скоростей; в — при положительном согласовании скоростей
При отсутствии
согласования скоростей (рис. 9, а)
сигналы на выходах
DD2
и DD3
отсутствуют. При отрицательном
согласовании скоростей (рис. 9, б)
импульсная
последовательность с 3-го выхода
распределителя записи совпадает с
единичным состоянием выхода триггера
![]() ,
в результате чего формируется сигнал
на выходе элемента DD2|.
При положительном согласовании
скоростей (рис. 9, в)
импульсная последовательность с 1-го
выхода распределителя записи совпадает
с единичным состоянием выхода Q
триггера и формируется сигнал на выходе
элемента DD3.
,
в результате чего формируется сигнал
на выходе элемента DD2|.
При положительном согласовании
скоростей (рис. 9, в)
импульсная последовательность с 1-го
выхода распределителя записи совпадает
с единичным состоянием выхода Q
триггера и формируется сигнал на выходе
элемента DD3.
Аналоговый детектор
используется в приемной части для
определения текущего значения
временного интервала между моментами
записи и считывания. В аналоговом
детекторе (рис.10, а),
как
и в цифровом, импульсные последовательности
с одноименных выходов
распределителей записи и считывания
подаются на раздельные входы R
и S
триггера, скважность сигнала на выходе
которого характеризует взаимное
временное положение импульсов записи
и считывания. Сигнал с выхода триггера
подается на вход ФНЧ, который выделит
постоянную составляющую напряжения
сигнала. Величина этого напряжения
(рис.10, б) зависит
от скважности сигнала. При нормальной
работе ЗУ импульсы записи и считывания
сдвинуты относительно друг друга на
половину периода их следования. В этом
случае скважность сигнала на выходе
триггера будет равна двум, а напряжение
постоянной составляющей на выходе ФНЧ
— среднему  значению,
что соответствует номинальной скорости
считывания. При
увеличении или уменьшении временного
интервала между моментами
записи и считывания изменяются скважность
сигнала на выходе триггера и значение
постоянной напряжения сигнала. Это
напряжение подается на схему управления
ГУН, которая плавно изменяет частоту
считывания, увеличивая или уменьшая ее
в зависимости от согласования
скоростей.
значению,
что соответствует номинальной скорости
считывания. При
увеличении или уменьшении временного
интервала между моментами
записи и считывания изменяются скважность
сигнала на выходе триггера и значение
постоянной напряжения сигнала. Это
напряжение подается на схему управления
ГУН, которая плавно изменяет частоту
считывания, увеличивая или уменьшая ее
в зависимости от согласования
скоростей.
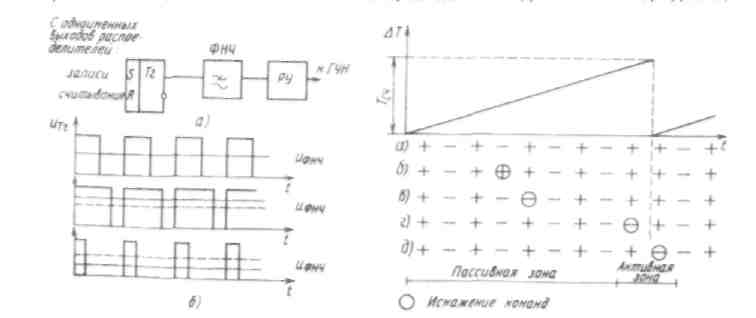
Рис. 10 Структурная схема аналогового временного
детектора (а) и диаграммы его работы (б)
Передача команд согласования скоростей.
В системах с односторонним согласованием скоростей необходимо передавать информацию о двух состояниях передающего устройства: отсутствии или наличии КСС. Для передачи этой информации достаточно одного двоичного разряда. Тогда для защиты от искажений одного символа КСС достаточно использовать трехразрядную кодовую группу, для защиты двух символов — пятиразрядную кодовую группу и т. д. Обычно в системах с односторонним согласованием скоростей для передачи соответствующих команд используются кодовые группы вида 00...0 — для передачи информации об отсутствии согласования скоростей и 11...1 для передачи информации о наличии согласования скоростей. Число символов в кодовой группе выбирают нечетным. При этом правильное опознавание КСС осуществляется, если число искаженных символов не превышает половины общего числа символов в команде.
В системах с двусторонним согласованием скоростей необходимо передавать информацию о трех возможных состояниях передающего устройства: отсутствии согласования скоростей, положительном согласовании скоростей и отрицательном согласовании скоростей. Для передачи этой информации необходимо два двоичных разряда. Тогда для защиты от искажений одного символа КСС необходимо использовать пятиразрядную кодовую комбинацию, для защиты от искажения двух символов — семиразрядную кодовую комбинацию и т. д. Увеличение числа КСС и числа разрядов в кодовой комбинации приводит к возрастанию объема передаваемой информации, следовательно, системы с двусторонним согласованием скоростей менее экономичны.
Разработаны системы с двусторонним согласованием скоростей и двухкомандным управлением (исключена передача команды об отсутствии согласования скоростей). По числу передаваемых команд подобные системы идентичны системам с односторонним согласованием скоростей. Структура двухкомандного сигнала показана на рис.11, а. При отсутствии согласования скоростей с передающей станции будет поступать чередование положительных и отрицательных команд согласования скоростей. Если временной интервал ΔТ между моментами записи и считывания достигнет значения Тсч, то необходимо произвести согласование скоростей. В этом случае передаются подряд две команды положительного или отрицательного согласования скоростей (рис.11, а). Такая структура передачи КСС позволяет выявить одиночные ошибки в передаваемых командах. Для рассмотрения возможности определения ошибок интервал времени передачи чередующихся команд назовем пассивным, а интервал времени передачи команд положительного или отрицательного согласования скоростей (две одинаковые команды подряд) — активным.
На рис.11, б, в показаны ошибки в пассивном интервале передачи команд. Эти ошибки легко обнаружить, так как подряд следуют три одинаковые команды, что при нормальной работе невозможно. Сложнее выявить ошибки в активном интервале (рис.11, г, д), поскольку в данном случае положительная команда трансформируется в отрицательную и наоборот.

Рис. 11 Структура двухкомандного сигнала при двустороннем
согласовании скоростей
Рис. 12 Приемник команд согласования скоростей с коррекцией ошибок на пассивном интервале передачи КСС |
Приемник КСС с коррекцией ошибки в пассивном интервале показан на рис.12. Он содержит три узла:
Опознаватель определяет знак согласования скоростей. Анализатор выявляет положительную или отрицательную КСС. Он содержит триггер Тг, на один вход которого подаются импульсы команд положительного согласования скоростей, а на другой — отрицательные, и две схемы И. При появлении подряд двух импульсов одинаковых команд второй импульс пройдет через свою схему И. Корректор ошибок служит для выявления ошибки в пассивном интервале времени. Он содержит |
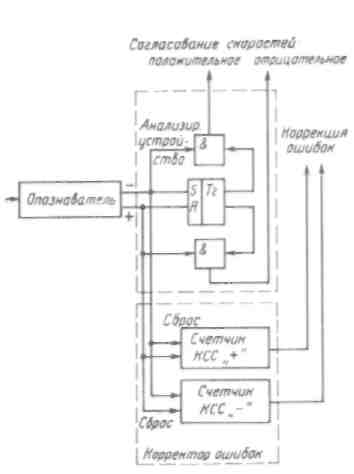
два счетчика команд: положительных и отрицательных. Емкость счетчиков — три единицы. Счетчики подключены к опознавателю знака так, что появление команды определенного знака записывается в свой счетчик, а для другого счетчика он является сигналом сброса. Если в счетчик подряд поступило три команды, необходимо осуществить коррекцию. При коррекции производится вставка или изъятие из цифрового потока одного временного интервала в зависимости от прошедшей команды согласования скоростей. Такая коррекция не позволяет восстановить передаваемую кодовую комбинацию потока, но дает возможность сохранить длительность его цикла, что не повлечет за собой срыва цикловой синхронизации в этом потоке.
Для коррекции ошибок в активном интервале передачи команд с передающей станции поступает знак промежуточного значения изменения временного интервала между сигналами записи и считывания. Необходимо учесть, что команды согласования скоростей будут передаваться довольно редко. Это определяется стабильностью частоты задающего генератора, используемого при формировании низовых потоков и в оборудовании временного группообразования. Рассмотрим это на примере системы передачи ИКМ-120. Как будет показано далее, расхождение частот может достигать 120 Гц, т. е. за 1 с максимальное число КСС равно 120, а число циклов за 1 с — 8000, т. е. в 67 раз больше. В каждом цикле имеются временные позиции для передачи информационных символов при отрицательном согласовании скоростей. При отсутствии команд согласования скоростей эти временные позиции можно использовать для передачи знака промежуточного значения изменения временного интервала между сигналами записи и считывания. Из этого видно, что информация о знаке промежуточного значения изменения временного интервала будет передаваться значительно чаще, чем сами КСС.
При использовании такого способа коррекции каждая сдвоенная команда несет в себе информацию только о наличии согласования скоростей, в то время как решение о знаке этого согласования принимается на основе многократно передаваемой информации о знаке изменения временного интервала между сигналами записи и считывания. Как показано на рис.11, г,д при одиночном искажении сдвоенных команд последовательности (+ +) преобразуются в последовательности (- -), а последовательности (- -) — в последовательности (+ +); при этом момент передачи сдвоенных команд сдвигается на один временной интервал передачи КСС. Это и используется в приемнике согласования скоростей для коррекции ошибок.
В схему приемника команд согласования скоростей добавляются узлы определения знака промежуточного состояния скоростей и устройство сравнения, определяющее несоответствие информации о знаке согласования скоростей в виду сдвоенной команды.
Устройство фазовой автоподстройки частоты. Схема устройства ФАПЧ приведена на рис. 5 (пункт 4.2). В состав ее входят временной детектор ВД, схема управления СУ и генератор, управляемый напряжением, ГУН. Работа аналогового ВД была рассмотрена ранее. Схема управления, содержащая ФНЧ, выделяет из сигнала с выхода ВД постоянную составляющую напряжения. Для идеального восстановления первоначальной скорости цифрового потока ФНЧ должен иметь бесконечно малую полосу пропускания. Это позволит значительно уменьшить временные флуктуации импульсов передаваемого цифрового потока, вносимые оборудованием временного группообразования. Однако при этом не обеспечивается необходимая полоса захвата устройства ФАПЧ, которая не может быть меньше максимального расхождения частот записи в передающем устройстве fз.пер и считывания в приемном устройстве fсч.пр. Следовательно,
![]() ,
,
где ΔFФНЧ — полоса пропускания ФНЧ; δ — относительная нестабильность частоты f.
Так, при объединении цифровых потоков, сформированных аппаратурой ИКМ-30, f3 = fсч = 2048 кГц, δf з = δf сч =3*10-5, ΔFФНЧ =120 Гц.
На вход ГУН будут проходить все составляющие сигнала с выхода ВД, попадающие в полосу ΔFФНЧ, что приводит к временным флуктуациям передаваемого цифрового потока. Для уменьшения этих флуктуации в схемах ФАПЧ применяются специальные устройства.