

4.2. Расчет длины волны и параметров фар
При использовании в РЛ круглой ФАР с диаметром ширина ДНА в азимутальной плоскости и в угломестной плоскости одна и та же, т.е. . Значение определяется из заданной разрешающей способности РЛ по угловым координатам, которая составляет
(4.4)
Тогда длина волны зондирующего сигнала может быть найдена из соотношения
. (4.5)
Коэффициент усиления рассматриваемой ФАР при , выраженной в градусах, будет)
, (4.6)
где принято, что КПД антенны .
Угол смещения максимумов ДНА (см. рис. 3.1), характеризующий отклонение максимумов диаграмм и от равносигнального направления, выбирается из компромиссных соображений (см.§ 3.2 данного пособия). Рекомендуется принимать
. (4.7)
При таком значении диаграммы и пересекаются на уровне, близком к уровню половинной мощности.
4.3. Расчет параметров сигнала
В данном разделе рассчитываются длительность и период повторения зондирующих импульсов.
Длительность импульса определяется из заданного значения разрешающей способности РЛ по дальности :
. (4.8)
Период повторения импульсов выбирается из условия однозначности дальнометрии:
,
которое с целью конкретизации расчета рекомендуется заменить равенством
, (4.9)
где коэффициент запаса . Появляющийся при этом дополнительный интервал времени, равный , где - максимальная дальность цели, целесообразно использовать для коррекции неидентичностей приемных трактов, обеспечив соответствующее быстродействие устройства коррекции.
4.4. Выбор параметров устройств обработки сигналов
Основным устройством, подлежащим рассмотрению в данном разделе, как следует из рис. 4.3, является логарифмический усилитель промежуточной частоты ЛУПЧ.
Рекомендуется использовать ЛУПЧ в качестве квазиоптимального фильтра (см. .§ 2.4 данного пособия) и выбирать его полосу пропускания из соотношения
. (4.10)
При такой полосе пропускания потери энергии сигнала из-за неоптимальностн фильтра составляют 1,12 или примерно 0,5 дБ.
При разработке требований к элементам угломерного тракта следует учесть, что доплеровский сдвиг частоты отраженного сигнала компенсируется с помощью АПЧ, и указать возможные пределы изменения доплеровского сдвига частоты , используя формулу
, (4.11)
где - максимальная скорость носителя радиолокатора (истребителя). Поскольку значение в исходных данных не приводится, рекомендуется задаться этим значением или принять =1980 км/ч, используя для пересчета в систему СИ соотношение (1.3).
Кроме того, используя
соотношение (4.3), в требованиях следует
указать, какой дальности должен
соответствовать входной сигнал при
 (см.рис.
4.4).
(см.рис.
4.4).
4.5. Расчет погрешностей
В данном разделе рассчитываются погрешности следящего измерителя угла ; погрешности, вызываемые угловым шумом, и аппаратурные погрешности, а также полная погрешность угломерного канала.
Погрешности следящего измерителя. В соответствии с заданием точность следящего измерителя угла характеризуется средней квадратической погрешностью (1.21).
Значение погрешности определяется как на дальности пуска бортового оружия , так и на максимальной дальности при оптимизации следящего угломера для дальностей и . На основании расчета выбирается тот вариант оптимизации и соответствующая ему полоса пропускания следящего измерителя , при которой достигается максимальная точность на заданной дальности.
Решение поставленной задачи производится при условиях и допущениях, изложенных в § 1.6 данного пособия. Критерием оптимальности измерителя является минимум суммы дисперсий флуктуационной и динамической погрешностей (1.23). Оптимальная полоса пропускания следящего измерителя определяется из табл.1.1 с учетом того, что рассматриваемый измеритель имеет обычно астатизм 1 порядка. Входящая в приведенные в табл. 1.1 формулы величина представляет собой эквивалентную спектральную плотность флуктуаций (на нулевой частоте) на выходе схемы вычитания (СВ), вызванных шумом, действующим на входе СВ. Величина имеет размерность град2/Гц и в предположении равномерности спектра флуктуаций в пределах полосы пропускания следящего измерителя рассчитывается по формуле
 , (4.12)
, (4.12)
где П - пеленгационная чувствительность; -период повторения импульсов, a - отношение мощностей сигнала и шума на выходе ПУТ. Коэффициент "2" в числителе указывает на увеличение мощности шума при вычитании сигналов (считается, что шумы обоих ПУТ некоррелированые и имеют одинаковые дисперсии.
Пеленгационная чувствительность имеет размерность град-1 и в амплитудно-амплитудном радиопеленгаторе равна
 . (4.13)
. (4.13)
При определении П целесообразно воспользоваться рис. 3.4, из которого следует, что , и
 . (4.14)
. (4.14)
Величина 1/П выполняет функцию масштабного коэффициента и в (4.12) отображает тот факт, что проникающий на выход СВ шум воспринимается следящей за углом системой как случайное приращение угла и является источником флуктуационной погрешности пеленгатора.
Погрешность угломерного канала рекомендуется выражать в угловых секундах (1 угл.с=1/3600 градуса). Поэтому значение можно выражать в (угл.с)2/Гц и вместо (4.12) использовать формулу
 . (4.15)
. (4.15)
В формулы табл. 1.1 входит угловая скорость цели . Для нахождения значения следует воспользоваться соотношением (1.2). При этом значения рассчитываются для всех дальностей, в пределах от до , участвующих в последующих расчетах.
Вычисление погрешностей рекомендуется проводить по методике, изложенной в подразделе "Порядок расчета" § 1.6 данного пособия, используя схему "алгоритма" расчета, показанную на рис.1.9. Ниже приведены особенности расчета в проектируемом пеленгаторе.
1. Если в исходных данных задана погрешность на дальности , то на первом этапе расчета принимается, что ; ; ; и вычисляются значения и , соответствующие дальности . Принимается, что следящий измеритель оптимизирован для дальности , т.е. .
2. На втором этапе расчета определяется погрешность следящего измерителя, оптимизированного для дальности , на дальности . Для расчета отношения мощностей сигнала и шума на выходе ПУТ при служит соотношение (1.31).
3. На третьем и четвертом этапах рассчитываются погрешности и , имеющие место в оптимизированном для дальности измерителе на дальностях и соответственно.
Результаты расчета следует представлять в виде таблицы, форма которой аналогична форме табл. 4.1:
Таблица 4.1
N |
|
R |
|
|
|
|
|
|
|
1 |
|
|
|
|
|
|
|
|
|
2 |
|
|
|
|
|
|
|
|
|
3 |
|
|
|
|
|
|
|
|
|
4 |
|
|
|
|
|
|
|
|
|
Расчеты должны иллюстрироваться графиком, на котором представляются зависимости от относительной дальности , одна из которых соответствует , а другая - , т.е. оптимизации измерителя для дальностей или соответственно.
Погрешность углового шума. Погрешность , вызываемая угловым шумом (см.§ 1.6), рассчитывается (в радианах) по формуле
, (4.I6)
где - максимальный размер цели.
При переходе к угловым секундам (4.16) принимает вид
. (4.17)
Аппаратурная погрешность. Расчет выполняется с помощью соотношения (4.3), которое можно использовать непосредственно или записать в более привычном виде
 . (4.18)
. (4.18)
Рекомендуется
сначала рассчитать
при заданных значениях неидентичностей
и
(см.§ 4.1) с учетом зависимости
 от дальности
до цели.
от дальности
до цели.
Действительно,
, где
- амплитуда принимаемого сигнала в
максимуме ДНА, а
- напряжение сигнала на входе ЛУПЧ,
соответствующее началу логарифмического
участка амплитудной характеристики
(см.§ 4.1). Уравнение для принимаемой
радиолокатором мощности
 отраженного сигнала показывает, что
пропорциональна
,
поэтому амплитуда этого сигнала
пропорциональна
отраженного сигнала показывает, что
пропорциональна
,
поэтому амплитуда этого сигнала
пропорциональна
 ,
т.е. при прочих равных условиях
,
т.е. при прочих равных условиях
 .
.
Так как логарифмическая
характеристика (см. рис. 4.4) существует
только при
 ,
то необходимо выбирать
,
то необходимо выбирать
 .
Тогда последнее соотношение принимает
вид
.
Тогда последнее соотношение принимает
вид
 . (4.19)
. (4.19)
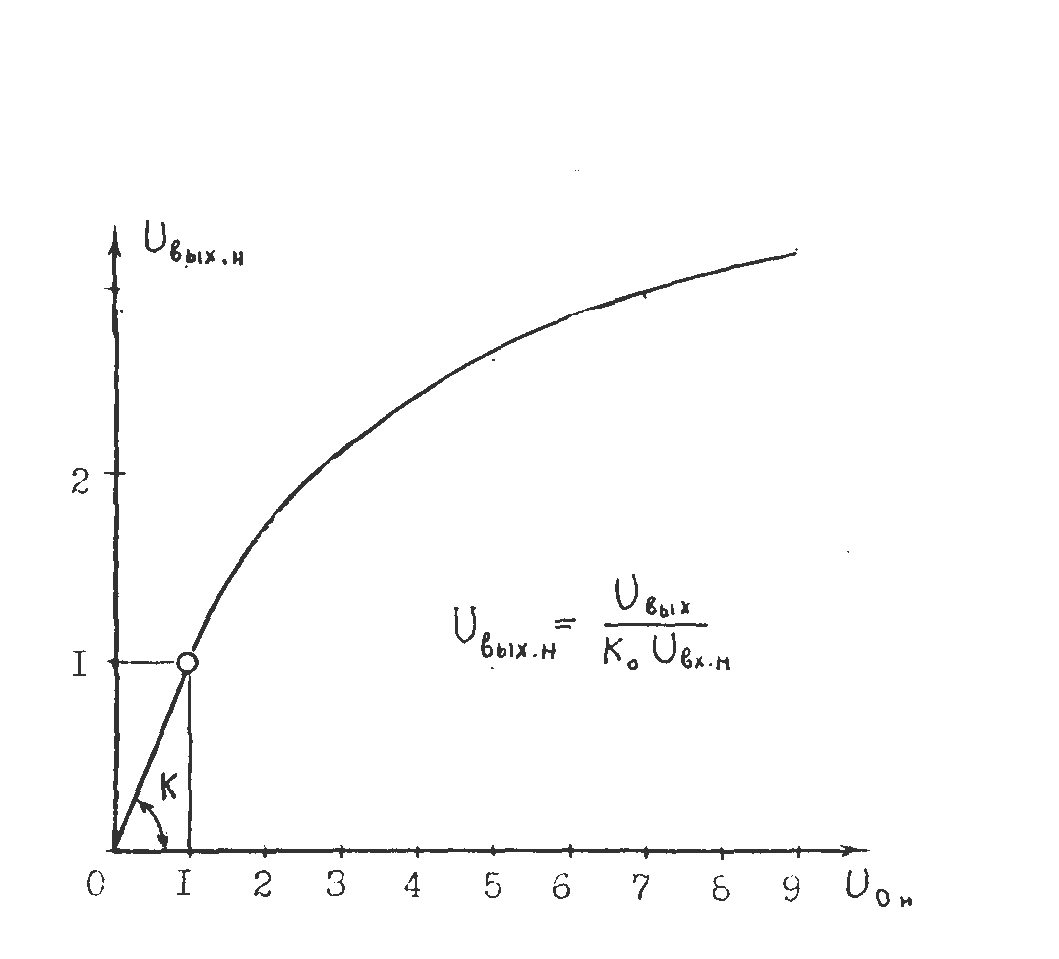
Рис. 4.4
Таким образом, с
уменьшением
имеет место рост
,
a
следовательно и увеличение аппаратурной
погрешности (4.18) по мере сближения с
целью. Погрешность
достигает максимального значения на
 .
Именно для этой дальности необходимо
рассчитывать
,
подставляя в (4.18) значение
.
Именно для этой дальности необходимо
рассчитывать
,
подставляя в (4.18) значение
 .
.
Следует иметь в виду, что при подстановке требования к идентичности приемных трактов могут оказаться трудно реализуемыми. В этом случае допускается определять на дальности .
После расчета имеющейся аппаратурной погрешности следует найти относительное ее значение и сравнить его с допустимым значением , указанным в исходных данных. Если полученная относительная погрешность превышает заданную, то это свидетельствует о необходимости применения коррекции неидентичностей. Естественно, что можно сравнивать полученное значение с допустимым значением , которое вычисляется из заданного значения при известной ширине диаграммы направленности антенны .
Если коррекция
производится путем изменения коэффициента
передачи
 одного из ПУТ (т.е. путем управления
коэффициентом
),
то коэффициент
рассчитывается по формуле:
одного из ПУТ (т.е. путем управления
коэффициентом
),
то коэффициент
рассчитывается по формуле:
 , (4.20)
, (4.20)
которая следует
из (4.3) при
 .
.
Максимальное значение коэффициента при коррекции равно
 , (4.21)
, (4.21)
где
- коэффициент запаса;
 - заданное в исходных данных значение
.
Результаты расчета
- заданное в исходных данных значение
.
Результаты расчета
 и
и
 используются при проектировании
устройства коррекции.
используются при проектировании
устройства коррекции.
Полная погрешность. Полная погрешность рассчитывается с помощью соотношения
(4.22)
по результатам определения составляющих этой погрешности, полученным в данном параграфе. Исключение составляет аппаратурная погрешность , значение которой должно соответствовать остаточной аппаратурной погрешности, имеющей место после проведения коррекции. В соотношении (4.22) используется то значение , которое получено при выбранном варианте оптимизации следящего измерителя угла .
Результаты расчета точностных параметров угломерного канала представляются в виде таблицы и графика, построенного с помощью этой таблицы, отображающих зависимость погрешностей от дальности. Головка таблицы должна иметь следующую форму:
|
|
|
|
|
|
|
|
|
|
|
|
где относительная дальность берется с дискретом 0,1, а дальность меняется от до . На графике представляется зависимость относительной погрешности от относительной дальности , меняющейся с дискретом и в пределах, указанных выше.