

ekzamen_ORLiRN
.pdf1. |
Основные сведения об РЛС. |
|
|
|
● числу применяемых каналов излучения и приема |
||||||||||||||
РЛС |
– |
технические |
средства |
получения |
сигналов (одноканальные и многоканальные с |
||||||||||||||
радиолокационной |
информации |
(совокупности |
частотным |
или |
пространственным |
разделением |
|||||||||||||
сведений о целях) |
|
|
|
|
|
|
каналов); |
|
|
|
|
|
|
|
|
||||
Процесс |
получения |
радиолокационной информации |
● |
числу и виду измеряемых координат (одно-, двух- и |
|||||||||||||||
поэтапно: |
|
|
|
|
|
|
|
трехкоординатные); |
|
|
|
|
|
|
|||||
● обзор пространства: одновременный (число лучей |
● |
способу |
измерения, |
отображения |
и |
съема |
|||||||||||||
РЛС, перекрывающих зону обзора, равно числу |
координат объекта; |
|
|
|
|
|
|
||||||||||||
элементов разрешения по |
углам); |
последовательный |
● месту установки РЛС (наземные, корабельные, |
||||||||||||||||
(производится с помощью одного |
луча); |
смешанный |
самолетные, |
спутниковые); |
|
|
|
|
|||||||||||
(имеет несколько лучей, причем обычно обзор по одной |
● |
функциональному |
назначению |
РЛС |
|
[от |
|||||||||||||
угловой координате производится одновременно, а по |
малогабаритных переносных РЛС измерения скорости |
||||||||||||||||||
другой — последовательно) |
|
|
|
|
|
автомобилей до |
огромных |
наземных |
РЛС |
систем |
|||||||||
● обнаружение цели: принятие решения о наличии или |
противовоздушной (ПВО) и противоракетной (ПРО) |
||||||||||||||||||
отсутствии цели в каждом выделенном участке |
обороны]. |
Перечислим |
основные типы |
наземных, |
|||||||||||||||
пространства |
с |
минимально |
допустимыми |
корабельных и самолетных РЛС различного |
|||||||||||||||
вероятностями ошибочных решений |
|
|
|
назначения. |
|
|
|
|
|
|
|
|
|||||||
● измерение: оценка координат и параметров движения |
Типы РЛС: наземные, корабельные, бортовые |
|
|||||||||||||||||
цели (дальность, азимут, угол места) |
|
|
|
Тактические характеристики РЛС: Тактическими |
|||||||||||||||
● разрешение: выполнение задач обнаружения и |
называют характеристики системы, требование |
||||||||||||||||||
измерения параметров произвольной цели при наличии |
которым система должна отвечать, чтобы поставленная |
||||||||||||||||||
других целей |
|
|
|
|
|
|
|
задача могла быть решена. |
|
|
|
|
|||||||
● распознавание целей: установление принадлежности |
● назначение системы; |
|
|
|
|
|
|||||||||||||
разрешаемой цели к определённому классу (свой- |
● место установки; |
|
|
|
|
|
|
||||||||||||
чужой, боевые корабли/гражданские и т.д.) |
|
|
● состав измеряемых координат; |
|
|
|
|||||||||||||
● помехозащищенность: способность радиолокатора |
● зона (область) обзора - область пространства, в |
||||||||||||||||||
поддерживать на заданном уровне показатели качества |
которой объекты с заданными характеристиками |
||||||||||||||||||
обнаружения, измерения (или распознавания) при |
отражения обнаруживаются с вероятностью не меньше |
||||||||||||||||||
наличии помех, а также способность использовать сами |
заданной |
|
|
|
|
|
|
|
|
||||||||||
помехи как источник информации |
|
|
|
● |
время |
|
обзора |
- |
время, необходимое для |
||||||||||
Виды РЛС: |
|
|
|
|
|
|
|
однократного обзора заданной зоны действия системы |
|||||||||||
● активная: вторичное излучение - радиолокатор |
● точность измерения координат - характеризуется |
||||||||||||||||||
излучает в направлении на цель мощный зондирующий |
погрешностями при измерении координат и параметров |
||||||||||||||||||
сигнал, принимаемый сигнал, создается в результате |
движения объекта. Измерение параметров сигнал |
||||||||||||||||||
отражения (рассеяния) объектом электромагнитных |
всегда сопровождается ошибками: систематическими |
||||||||||||||||||
колебаний; переизлучение – (с активным ответом) - |
(появляются при измерении параметров по приборам); |
||||||||||||||||||
сигнал, ретранслируется специальным ответчиком, |
случайными (появляются от факторов, не подлежащих |
||||||||||||||||||
установленным на объекте |
|
|
|
|
|
учету. Поэтому эти ошибки подчиняются нормальному |
|||||||||||||
● пассивная: сигналом, принимаемым РЛС, является |
закону распределения) |
|
|
|
|
|
|||||||||||||
естественное излучение объектов в радио-диапазоне |
● разрешающая способность - способность системы |
||||||||||||||||||
преимущественно теплового происхождения, поэтому |
раздельно наблюдать 2-е близко расположенные цели, |
||||||||||||||||||
пассивную |
радиолокацию |
называют |
также |
при этом предполагается, что координаты у этих целей |
|||||||||||||||
радиотеплолокацией, можно определить только |
одинаковые, за исключением координаты по которой |
||||||||||||||||||
направление на цель - пеленгация |
|
|
|
определяется разрешающая способность (по дальности, |
|||||||||||||||
Классификация РЛС: по признакам |
|
|
|
по направлению и по скорости) |
|
|
|
||||||||||||
● происхождению радиосигнала, принимаемого |
● пропускная способность - число объектов, |
||||||||||||||||||
приемником РЛС: активные РЛС (с активным и |
обслуживаемых системой одновременно или в единицу |
||||||||||||||||||
пассивным ответом), полуактивные и пассивные РЛС; |
времени |
|
|
|
|
|
|
|
|
||||||||||
● |
используемому |
диапазону |
радиоволн |
(РЛС |
● помехозащищенность - способность надежного |
||||||||||||||
декаметрового, |
|
метрового, |
|
дециметрового, |
выполнения заданных функций в условиях воздействия |
||||||||||||||
сантиметрового и миллиметрового диапазонов); |
|
непреднамеренных |
и |
|
организованных |
|
помех, |
||||||||||||
● |
виду зондирующего сигнала |
[РЛС с непрерывным |
определяется скрытностью работы системы и ее |
||||||||||||||||
(немодулированным или частотно-модулированным) и |
помехоустойчивостью. |
|
|
|
|
|
|||||||||||||
импульсным (некогерентным, когерентно-импульсным |
● надежность - свойство объекта сохранять во |
||||||||||||||||||
с большой и малой скважностью, с внутриимпульсной |
времени в установленных пределах значения |
||||||||||||||||||
частотной или фазовой модуляцией) излучением]; |
|
параметров, |
|
характеризующих |
способность |
||||||||||||||
|
|
|
|
|
|
|
|
|
|
выполнения требуемых функций |
|
|
|
||||||
●массогабаритные характеристики
●потребляемая мощность
Технические характеристики РЛС: параметры,
непосредственно определяющие тактические характеристики
●несущая частот-колебаний (или длина волны);
●параметры сигнала:
Ширина спектра сигнала - f |
|
|
|
|
1 |
|
; |
|
|
|
|
|
|
|
|
|||||||||||||||||
c |
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
и |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Длительность |
|
|
|
|
|
импульсов |
|
|
|
|
|
сигнала |
||||||||||||||||||||
|
|
|
c |
и |
, |
|
|
|
2 |
R |
; |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
R |
|
2 |
|
|
|
и |
|
c |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
Период повторения импульсов |
|
Т |
|
|
|
2R |
|
; |
|
|
|
|
||||||||||||||||||||
|
|
|
max |
|
|
|
|
|||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
П |
|
|
c |
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
Частота повторения |
F |
|
1 |
|
; |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||
|
|
|
|
|
|
|
|
|
|
П |
|
Т |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
П |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Излучаемая мощность |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
Средняя |
|
мощность |
|
|
|
|
|
|
|
Е |
|
|
|
Р |
, |
где |
Q |
TП |
||||||||||||||
|
|
|
Рср |
|
|
|
1 |
|
и |
|
|
|
||||||||||||||||||||
|
|
|
|
|
|
|
и |
|||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Т П |
|
|
|
Q |
|
|
|
|
||||||
скважность импульсов; |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||
Число импульсов в пачке |
N |
|
|
обл |
|
, |
|
|
|
|
|
|
|
|
|
|||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Т |
П |
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
Коэффициент сжатия сигнала |
|
|
kсж |
|
fcTизл ; |
|
|
|
||||||||||||||||||||||||
Длительность излучаемого импульса |
Т |
|
|
Е |
; |
|
|
|||||||||||||||||||||||||
|
1 |
|
|
|||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
изл |
|
Р |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1 доп |
|
|
|
Несущая частота импульсов |
|
|
f |
|
|
|
|
|
|
c |
|
|
|
|
|
|
|
|
||||||||||||||
|
|
0 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
и |
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
●чувствительность приемного устройства;
●характеристики антенны:
Коэффициент усиления антенны |
К усА Gи (п) и (п) , где |
Gи(п) КНД антенны приемной (передающей)
Раскрыв антенны d |
|
|
68 |
и |
; |
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
А |
|
|
|
|
|
|
|
|
|
0,5 |
|
|
||
|
|
|
|
|
|
||
Разрешающая способность по углу |
0,5 |
||||||
● метод обзора пространства и скорость обзора:
Время облучения |
|
|
|
0,5 |
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
обл |
|
V |
|
|
|
|
|
|
|
|
обз |
|
|
|
||
|
|
|
|
|
|
|
|
|
Скорость обзора V |
|
|
|
2 |
|
|
|
|
обз |
Т |
|
|
|
|
|||
|
|
|
|
|
|
|||
|
|
|
обз |
|
|
|||
|
|
|
|
|
|
|
||
При круговом обзоре |
V |
|
|
|
360 |
|||
обз |
t |
|
||||||
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
обз |
|
|
|
|
|
|
|
|
|
|
Число оборотов в минуту n 0,5FП
6N
●тип оконечного устройства
●габариты и масса станции
●мощность, принимаемая от источника питания:
РЕ1 , где Е1 - потребляемая энергия передатчика
1и
●параметры приемного устройства (коэффициент шума приемника - kш, полоса пропускания приемника -
f, номинальная промежуточная частота – fпромеж, общий коэффициент усиления приемника и т.д.)
●импульсными;
●непрерывными (излучают либо высокочастотный импульс, либо непрерывные сигналы типа ЛЧМ).
2. Последовательность операций при синтезе оптимального алгоритма. Этапы обработки сигналов РТС.
Обработка информации основывается на существовании различий между полезным сигналом и помехой. Весь процесс обработки РЛИ (радиолокационной информации) можно разделить на три основных этапа: первичную, вторичную и третичную обработку.
На этапе первичной обработки РЛИ цель обнаруживают и определяют ее координаты. Первичная обработка осуществляется по одной, но чаще по нескольким смежным разверткам дальности. Этого хватает для обнаружения цели и определения ее координат. Таким образом, первичной обработкой 3 РЛИ называется обработка информации за один период обзора РЛС. В состав первичной обработки РЛИ включают: обнаружение полезного сигнала в шумах; определение координат цели; кодирование координат цели; присвоение номеров целям Автоматическая или полуавтоматическая обработка
информации, полученной за несколько периодов обзора РЛС с целью обнаружения и непрерывного сопровождения траекторий целей, называется
вторичной обработкой радиолокационной информации. Она включает в себя следующие операции: определение параметров движения целей (курс, скорость, ускорение и т. д.) по данным, полученным за несколько обзоров РЛС; выделение области пространства, в которой с некоторой вероятностью ожидается появление отметки в следующем обзоре (экстраполяция отметок); сличение экстраполированных координат с вновь полученными и привязка новой отметки к траектории цели (продолжение траектории).
Обработку РЛИ, поступающей от нескольких источников, условились называть третичной обработкой информации (ТОИ).
Главной задачей третичной обработки является решение вопроса, сколько целей находится в действительности в зоне ответственности. Для решения этой задачи необходимо выполнить следующие операции: произвести сбор донесений от источников; привести отметки к единой системе координат и единому времени отсчета; установить принадлежность отметок к целям, т.е. решить задачу отождествления отметок; выполнить укрупнение информации.
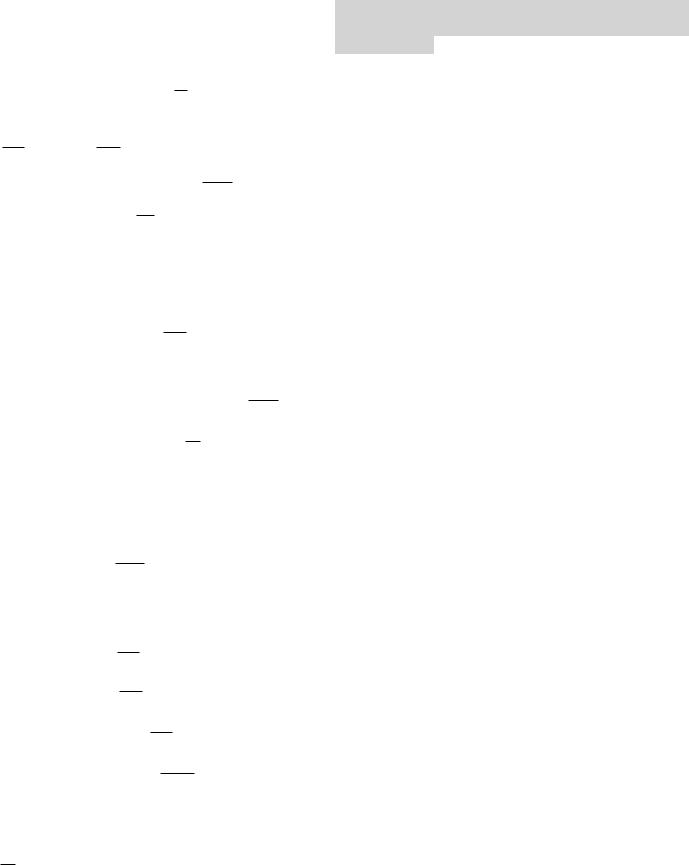
Структура оптимального измерителя: (реализуется вычисление корреляционных интегралов)
РЛС могут быть:
сигналов больше единицы (как правило, много больше единицы). В = τэ ∙ ∆fэ >> 1.
Значения τэ и ∆fэ обычно незначительно отличаются от длительности сигнала τи и ширины его спектра ∆f . Поэтому
значение В = τэ ∙ ∆fэ ≈ τи ∙ ∆f
Увеличение базы у сложных сигналов по сравнению с простыми достигается введением внутриимпульсной модуляции. В зависимости от вида внутриимпульсной модуляции различают несколько видов сложных сигналов (ЧМ,ФМ,АМ)
Оптимальный измеритель корреляционного типа может быть выполнен на основе применения, в общем случае, системы СФ (согласованного фильтра).
Косвенный метод получения оценки с использованием дискриминатора.
При этом предполагается, что известно опорное значение оцениваемого параметра Первый (верхний) канал оптимального дискриминатора
формирует сигнал рассогласования, а второй регулирует коэффициент усиления в зависимости от мощности сигнала и помехи. Первый канал называют дискриминатором, а второй — блоком точности. Основное применение дискриминаторы находят в схемах следящих измерителей
3.Модели и классификация излучаемых
сигналов. Тригонометрическая форма
представления.
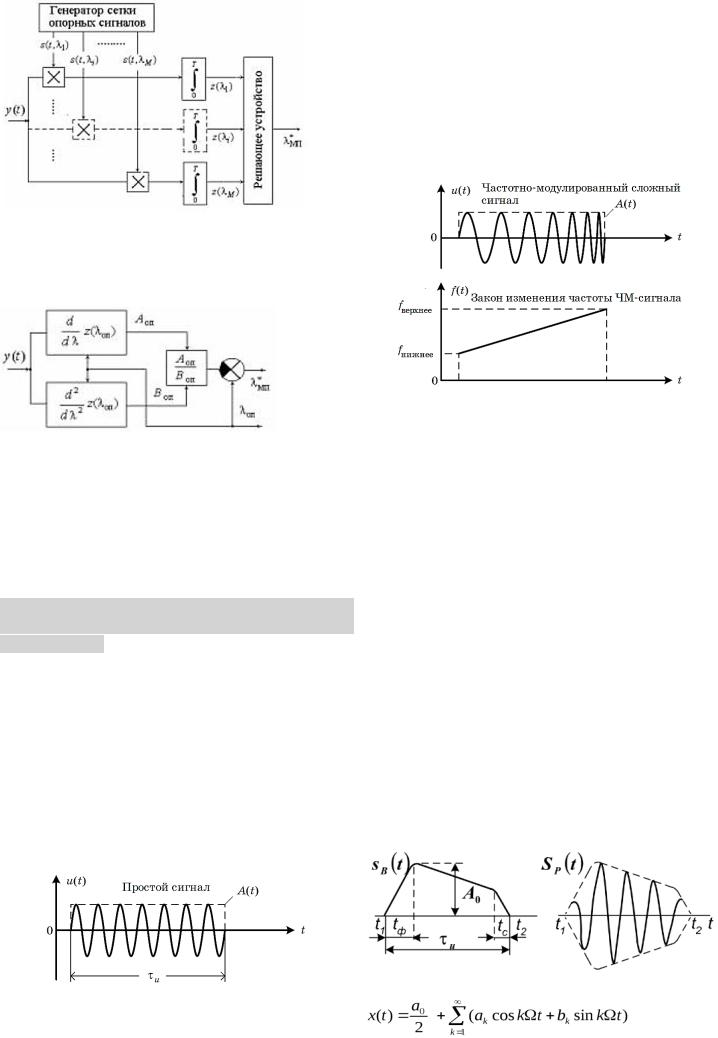
Модель применяемого в радиолокации сигнала: u(t) = A(t) ∙ cos[2πf0t + Ψ(t) + φ0], 0 ≤ t ≤ τи
где A(t) и Ψ(t) – функции амплитудной и фазовой модуляции; f0 – частота заполнения – несущая частота, 2πf0 = ω – круговая частота; φ0 – начальная фаза; τи – длительность сигнала Сигналы принято разделять на простые и сложные.
Простым называется сигнал, у которого отсутствует внутриимпульсная модуляция Ψ(t) = 0. Для простых сигналов произведение эффективной длительности τэ на эффективную ширину спектра ∆fэ, называемое базой сигнала, равно единице: В = τэ ∙ ∆fэ = 1
Сложным называется сигнал, у которого имеется внутриимпульсная модуляция Ψ(t) ≠ 0. База сложных
Основным противоречием, возникающим в радиолокации, является то, что при применении простых сигналов невозможно получить высокую разрешающую способность одновременно по дальности и скорости. Другим недостатком простых сигналов при одноканальном передающем тракте является то, что при их использовании нельзя получить одновременно высокую разрешающую способность по дальности и большую дальность действия РЛС при ограничении пиковой мощности излучения передатчика.
Импульсными являются сигналы, отличные от нуля в течение ограниченного времени. Эти сигналы существуют лишь в пределах конечного отрезка (t1, t2). При этом различают видеоимпульсы и радиоимпульсы. Если sB(t) – видеоимпульс, то соответствующий ему радиоимпульс описывается выражением: SP(t) = sB(t) cos(ωt + φ0) (частота ω и начальная фаза φ0 могут быть произвольными). В радиоимпульсе sB(t) называется огибающей, а функция cos(ωt + φ0) – заполнением.
Параметрами |
видеоимпульса |
принято считать его |
амплитуду A0, длительность τи, |
длительность фронта tф, |
|
длительность |
спада tc. Происхождение термина |
|
«видеоимпульс» связано с тем, что впервые такие импульсы начали применять для описания сигналов в телевидении.
Тригонометрическое представление:
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
решаются легче, если использовать в качестве |
||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
элементарных |
функций |
экспоненциальные функции |
||||||||||
В общем случае |
периодический |
сигнал |
содержит |
мнимого |
|
аргумента, |
например, |
комплексная |
|||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||
независящую от времени постоянную составляющую и |
огибающая легко отделяется от множителя с несущей |
||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||
бесконечный набор гармонических колебаний, или |
частотой при выражении сигнала в комплексной форме. |
||||||||||||||||||||||||||
гармоник, |
с |
частотами, |
кратными |
основной частоте |
A∙cos[j(ω0t + φ)] = [А∙ехр(j φ)]∙ехр (ω0t). |
|
|
||||||||||||||||||||
последовательности. |
|
|
|
|
|
|
|
|
|
|
Если разложить косинус суммы по формуле Эйлера [6, |
||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
Графическое изображение коэффициентов ряда Фурье |
21], то: |
|
|
|
|
|
|
|
|
|
|
||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||
для |
конкретного |
сигнала |
называется |
спектральной |
cos(ωt + φ) = 1/2[exp{j(ωt + φ)} + exp{-j(ωt + φ)}]. (6.1) |
||||||||||||||||||||||
диаграммой. |
По |
горизонтальной |
оси |
откладываются |
Этой записи |
можно дать геометрическую трактовку, |
|||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||
частоты |
гармоник, |
а |
по |
вертикали |
– амплитуды |
пользуясь представлением комплексных чисел в виде |
|||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||
(амплитудная диаграмма) или начальные фазы (фазовая |
точек или векторов на плоскости |
|
|
|
|
||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||
диаграмма). |
|
|
|
|
|
|
|
|
|
|
|
|
Выражение |
exp{j(ωt + φ)} |
представляет |
в |
данном |
||||||||||
4. |
Тригонометрическая форма представления в |
|
случае |
вектор единичной |
длины, проведенный под |
||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||
виде суммы квадратурных составляющих. |
|
|
|
|
углом ωt + φ к |
действительной |
оси. |
При |
изменении |
||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||
Квадратурные сигналы — это отображение исходного |
времени t |
этот |
вектор, |
единичной |
длины, |
меняет |
|||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||
сигнала на вещественную и мнимую ось. |
|
|
|
|
|
положение, |
вращаясь в положительном направлении с |
||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||
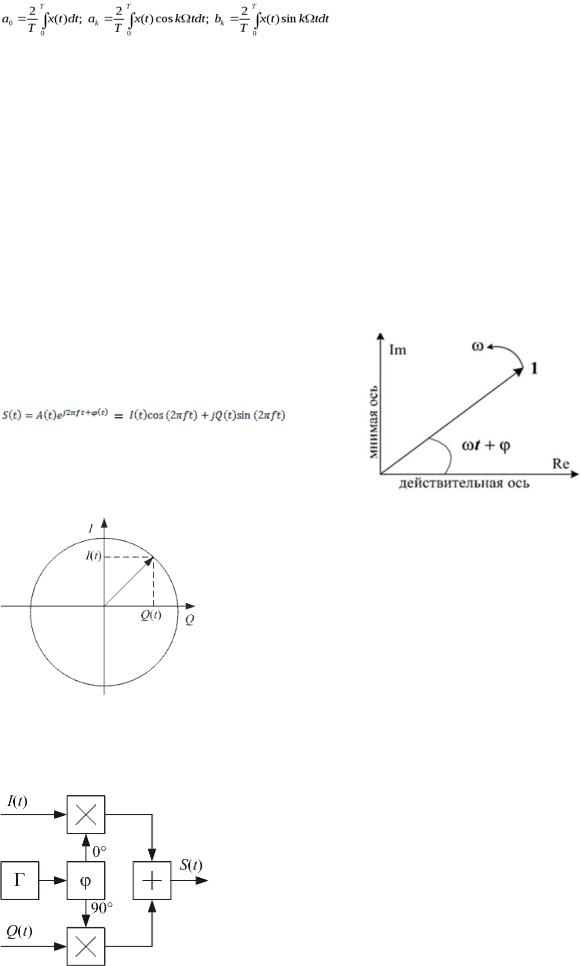
Математически синусоидальный сигнал с произвольной |
угловой скоростью ω. |
|
|
|
|
|
|
||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||
фазой можно представить в виде комплексной |
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||
экспоненты. Этот же сигнал по формуле Эйлера можно |
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||
представить в декартовой системе координат, что и |
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||
будет соответствовать квадратурным сигналам. |
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||
Отображение |
|
комплексного |
|
экспоненциального |
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||
сигнала на реальную и мнимую ось получили название |
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||
квадратур |
I |
(синфазная |
составляющая) |
и Q |
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||
(квадратурная составляющая). Сигнал |
I представляет |
Значительное количество сигналов можно представлять |
|||||||||||||||||||||||||
собой проекцию на реальную (косинусоидальную) ось. |
|||||||||||||||||||||||||||
в виде: |
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
s(t) = A(t)∙cos[ωt + φ(t)] |
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
cos(ωt + φ) = Re[exp{j(ωt + φ)}] |
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
sin (ωt + φ)= Im[exp{j(ωt + φ)}] |
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
6. |
|
Классификация |
и |
математические |
модели |
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
помех. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Природа помех разнообразная: шумы космических |
||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
объектов, атмосферные процессы, помехи от соседних |
||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
станций, индустриальные помехи и т.д. |
|
|
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Поступивший на вход приемника сигнал может быть |
||||||||||||
Схема универсального |
модулятора, |
позволяющего |
представлен |
в виде суммы: y(t)= s*(t)+n(t), где s*(t) – |
|||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||
получать узкополосный высокочастотный радиосигнал |
подвергнутый |
детерминированным |
или |
случайным |
|||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||
(или |
сигнал |
промежуточной |
частоты) |
получила |
преобразованиям |
в |
линии |
связи |
переданный |
||||||||||||||||||
передатчиком сигнал s(t), то есть s*(t)=F*[s(t)] |
|
||||||||||||||||||||||||||
название |
квадратурный |
модулятор. Структурная |
|
||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||
схема квадратурного |
|
|
|
|
модулятора |
n(t) – аддитивная помеха |
|
|
|
|
|
|
|||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Преобразования F*[.] связаны |
с |
изменениями |
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
параметров среды распространения сигналов в |
||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
зависимости от погоды (температура, влажность), |
||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
солнечной активности, времени года и суток и д.р. Эти |
||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
изменения происходят относительно медленно и часто |
||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
могут быть скомпенсированы, например, методами |
||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
автоматической |
регулировки |
усиления. |
Эту |
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
составляющую |
|
|
|
|
|
|
помехи |
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
называют мультиплекативнойпомехой. |
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Аддитивные |
помехи n(t) более |
опасны. |
По |
своему |
||||||||
|
|
|
происхождению они делятся на внутренние, |
||||||||||||||||||||||||
5. |
Комплексная форма представления и в виде |
|
|||||||||||||||||||||||||
|
возникающие в устройствах канала, и внешние, |
||||||||||||||||||||||||||
суммы ряда. Графическая форма представления. |
|
||||||||||||||||||||||||||
Многие |
формулы |
гармонического |
анализа |
поступающие от посторонних источников |
|
|
|||||||||||||||||||||
записываются значительно проще и некоторые задачи |
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||
Внутренние |
|
|
помехи |
|
|
обусловлены |
|
в |
|
|
|
|
|
|
|
|
|
|
|||||||
основном тепловымишумами (случайными движениями |
|
|
|
|
|
|
|
|
|
|
|||||||||||||||
электронов |
|
|
в |
проводниках) |
|
и дробовыми |
|
|
|
|
|
|
|
|
|
|
|||||||||
шумами (фюктуациями |
|
числа |
носителей |
тока, |
|
|
|
|
|
|
|
|
|
|
|||||||||||
преодолевающих потенциальный барьер в электронных |
|
|
|
|
|
|
|
|
|
|
|||||||||||||||
устройствах). |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
Тепловые шумы в принципе неустранимы. Их можно |
|
|
|
|
|
|
|
|
|
|
|||||||||||||||
уменьшить, |
понижая температуру «сильно шумящих» |
Принимаемый сигнал может иметь известную фазу, или |
|||||||||||||||||||||||
элементов. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
неизвестную. Может быть известно время прихода |
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||
Дробовые шумы можно снижать путем рационального |
сигнала. |
|
|
|
|
|
|
|
|
|
|||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
построения элементов схемы, но полностью устранить |
К основным |
параметрам |
электрических |
импульсов, |
|||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||
также нельзя. |
|
|
|
|
|
|
|
|
|
|
|
|
характерным |
для |
всех |
импульсных |
сигналов |
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||
Наводки от |
соседних элементов схем |
из-за |
плохой |
независимо от их формы относят амплитуду Um, |
|||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||
экранизации также относятся к внутренним помехам. |
длительность tи = tс и, для периодических |
||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||
Внешние |
помехи |
играют |
существенную |
роль |
при |
последовательностей |
|
импульсов, |
период |
T. |
|||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
радиосвязи. |
|
|
|
|
|
|
|
|
|
|
|
|
|
Амплитуда |
Um |
– |
величина |
максимального |
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||
Относительно грубую характеристику помех дают их |
импульсного отклонения напряжения от начального |
||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||
частотные |
спектры. |
По |
этому признаку |
они |
делятся |
уровня U0 , в частном случае нулевого. Длительность |
|||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||
на широкополосные |
помехи (их |
спектр |
значительно |
импульса tи = tс – интервал времени от момента |
|||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||
шире |
спектра |
сигнала) |
|
и узкополосные |
помехи (их |
появления сигнала до момента его окончания – рис. на |
|||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||
спектр соизмерим или уже спектра сигнала). |
|
|
|
слайде 6. Поскольку у реальных импульсов вследствие |
|||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||
По |
своей |
|
временной |
структуре |
помехи |
делятся |
малой скорости изменения напряжения на начальной и |
||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||
на гладкие и импульсные. У гладких помех огибающая |
конечной стадии формирования сигнала трудно |
||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||
мгновенных |
|
значений |
|
с |
большой |
вероятностью |
выделить «начало» и «конец», отсчет длительности tи |
||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||
находятся |
вблизи от своего среднего значения, |
а у |
ведут по уровню 0,1Um (обозначается tи 0,1 ) или по |
||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||
импульсных – наоборот. |
|
|
|
|
|
|
|
|
|
уровню |
0,5Um. В последнем случае длительность |
||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||
Наиболее |
полную |
характеристику |
помех |
дают |
их |
импульса называют активной – tиа (рис. г на сладе 6). |
|||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||
описания |
как |
случайных |
процессов |
(многомерными |
Период |
T |
периодической |
последовательности |
|||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||
плотностями |
распределения |
их |
параметров). |
Однако |
импульсов – минимальный временной интервал, для |
||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||
для такого описания на практике не достаточно данных |
которого |
выполняется |
условие |
периодичности |
u(t) = |
||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||
опомехах. Поэтому часто ограничиваются u(t+T).
одномерными плотностями w(x) распределения мгновенных значений помех и переменными характеристиками: средним значением m(t) и дисперсией σ2(t).
Белый шум — (теоритическая модель) стационарный шум, спектральные составляющие которого равномерно распределены по всему диапазону задействованных частот. Имеет одинаковую спектральную мощность на всех частотах.
автокорреляционная функция - дельта-функция
7. Модели одиночных принимаемых импульсных сигналов.
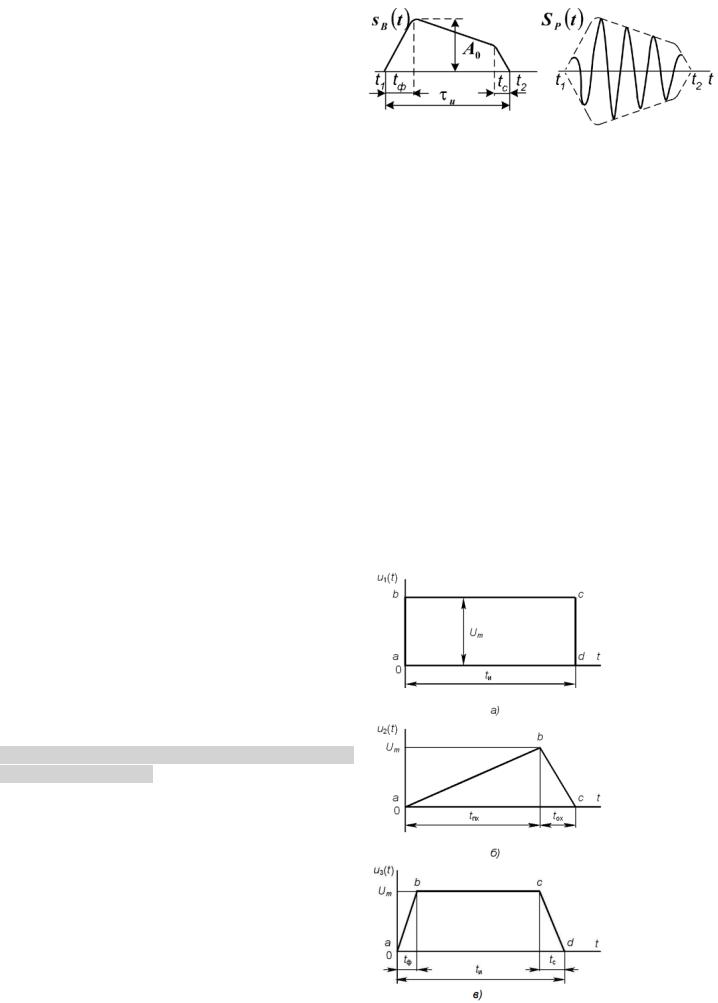
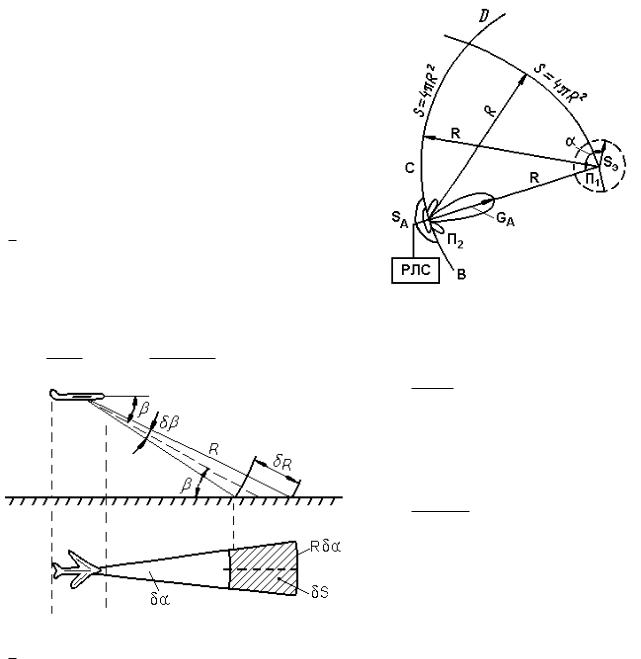
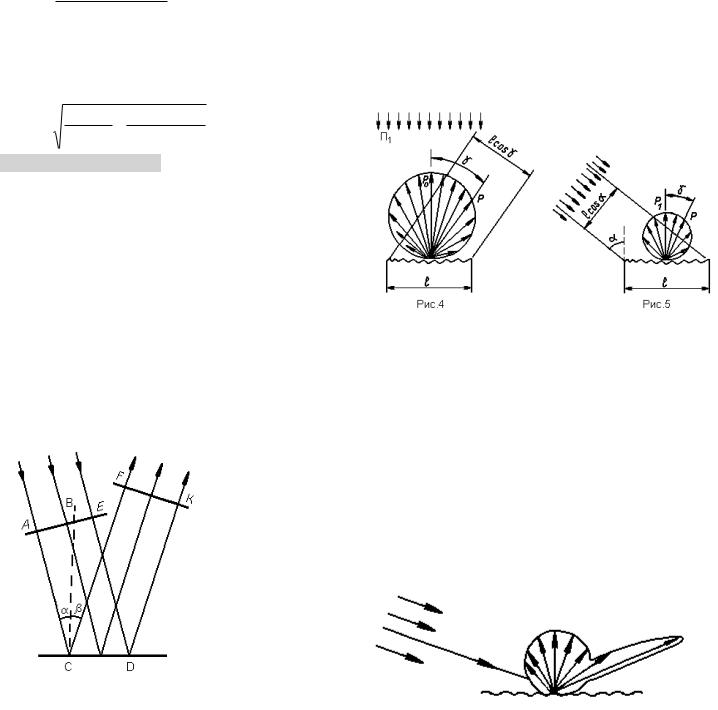
Импульсными являются сигналы, отличные от нуля в течение ограниченного времени. Эти сигналы существуют лишь в пределах конечного отрезка (t1, t2). При этом различают видеоимпульсы и радиоимпульсы. Если sB(t) – видеоимпульс, то соответствующий ему радиоимпульс описывается выражением: SP(t) = sB(t) cos(ωt + φ0) (частота ω и начальная фаза φ0 могут быть произвольными). В радиоимпульсе sB(t) называется огибающей, а функция cos(ωt + φ0) – заполнением. Параметрами видеоимпульса принято считать его амплитуду A0, длительность τи, длительность фронта tф, длительность спада tc.
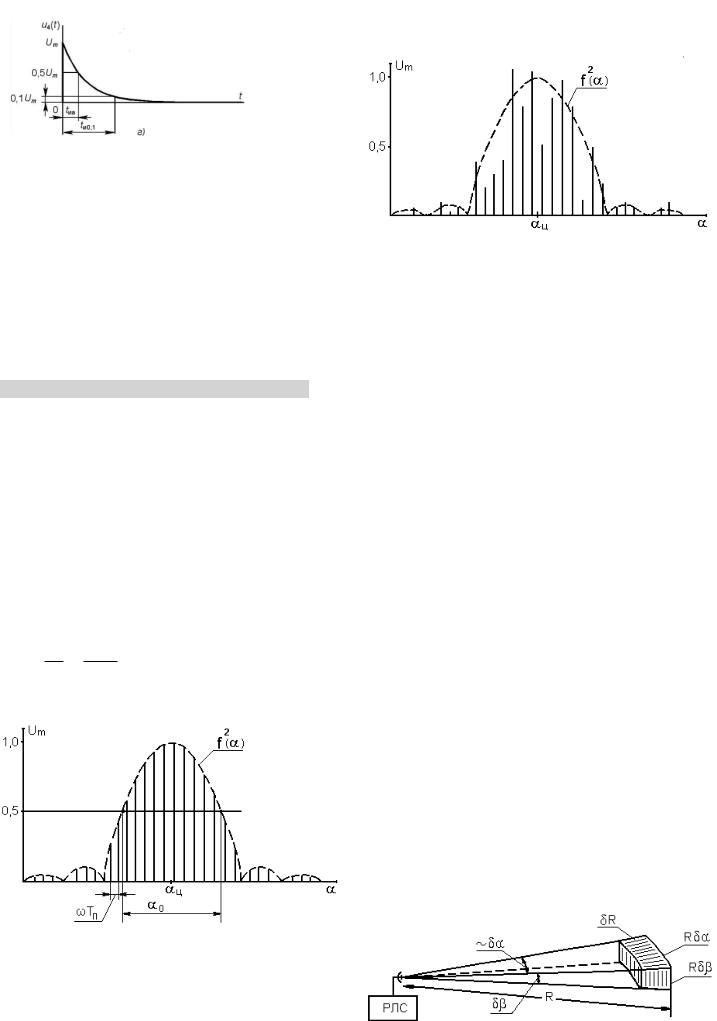
Импульсные сигналы: а) прямоугольный; б) треугольный; в) трапецеидальный; г) экспоненциальный Наиболее часто на практике встречаются импульсы
прямоугольной, треугольной (пилообразной), трапецеидальной и экспоненциальной формы.
Кроме основных параметров, электрические импульсы характеризуются полярностью.
Импульс считается положительным, если напряжение (ток) при его формировании увеличивается, и отрицательным – в противоположном случае (независимо от знака мгновенного значения напряжения (тока)).
При 0 < TП все амплитуды импульсов в пакете являются некоррелированными. В этом случае говорят, что флюктуации являются быстрыми
Форма огибающей импульсов в этом случае искажается, что ухудшает точность измерения угловой координаты цели. При 0 > Т0 все амплитуды импульсов в пакете сильно коррелированы. Такие флюктуации называют медленными (дружными). Форма огибающей пакета при медленных флюктуациях не искажается. Для РЛС кругового обзора обычно Тобз>>0, где Тобз - время обзора. В этом случае
8.Модели пачек принимаемых сигналов. некоррелированными являются амплитуды импульсов,
Если вращающаяся антенна импульсной РЛС проходит |
принадлежащих различным пакетам. |
|
|
||||||||||||||
направление на цель, то на выходе приёмника РЛС |
В |
случае |
быстрых |
флюктуаций |
результат |
||||||||||||
получают некоторое количество отражённых сигналов, |
суммирования (накопления) каждой пачки сигналов |
||||||||||||||||
модулированных |
по |
амплитуде |
диаграммой |
примерно определяется суммой их средних значений, |
|||||||||||||
направленности на приём и передачу. |
|
так как все сигналы внутри пачки принимают |
|||||||||||||||
Совокупность отражённых сигналов обычно называют |
независимые значения. Если отношение сигнал/шум в |
||||||||||||||||
пачкой сигналов или пакетом. Если обозначить - |
среднем мало, то такая пачка очень редко |
||||||||||||||||
угловую скорость вращения антенны, то время, в |
обнаруживается на фоне шумов. При больших |
||||||||||||||||
течение которого антенна пройдёт угол 0, равный |
отношениях сигнал/шум она, наоборот, всегда надёжно |
||||||||||||||||
ширине диаграммы направленности по уровню |
обнаруживается. В случае медленных флюктуаций |
||||||||||||||||
половины излучаемой мощности, составит |
|
результат накопления сигналов внутри пакета от обзора |
|||||||||||||||
T0 = 0 |
, |
|
|
|
|
|
к обзору будет резко отличаться, так как в этом случае |
||||||||||
число импульсов в пределах этого угла |
|
все сигналы внутри пакета примерно одинаковы, а |
|||||||||||||||
|
|
|
T |
|
|
|
, |
|
|
сигналы разных пакетов |
независимо флюктуируют. |
||||||
|
|
0 |
|
0 |
|
|
При этом некоторые пакеты будут обнаруживаться при |
||||||||||
|
|
|
|
|
|
|
|
|
|||||||||
|
0 |
|
T |
|
T |
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
П |
|
|
П |
|
|
|
малом (в среднем) отношении сигнал/шум, |
если ЭПР |
|||||
|
|
|
|
|
|
|
|
|
|
|
|||||||
где TП - период повторения импульсов РЛС. Обычно |
вследствие флюктуаций примет большое значение, зато |
||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|||||||
под числом N0 понимают число импульсов в пакете. |
при большом отношении сигнал/шум могут на- |
||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
блюдаться пропуски (необнаружение) пакетов. |
||||||
|
|
|
|
|
|
|
|
|
|
|
9. |
Разрешаемый объём. |
Точечные цели. |
||||
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
Пространственно-и объёмно-распределённые цели. |
|
|||||
|
|
|
|
|
|
|
|
|
|
|
Разрешаемым объёмом РЛС называют объём, равный |
||||||
|
|
|
|
|
|
|
|
|
|
|
произведению угловых разрешающих способностей, |
||||||
|
|
|
|
|
|
|
|
|
|
|
пересчитанных в линейные размеры, и разрешающей |
||||||
|
|
|
|
|
|
|
|
|
|
|
способности по дальности |
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
V R · R · R , |
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
где R - дальность; , |
и |
R - разрешающие |
||||
|
|
|
|
|
|
|
|
|
|
|
способности по азимуту, углу места и дальности. |
||||||
Вследствие флюктуаций ЭПР амплитуда импульсов в пакете тоже флюктуирует. Характер флюктуаций зависит от соотношения времени корреляции флюктуаций ЭПР 0, TП и Т0.
Сложные цели, состоящие из ряда отдельных |
10. |
Дальность действия РЛС |
в свободном |
||||||
излучателей, могут быть разделены на точечные и рас- |
пространстве |
|
|
||||||
пределённые. Точечными называют такие цели, |
Будем считать, что целью является металлический |
||||||||
линейные размеры которых малы по сравнению с |
зеркально отражающий шар. Радиолокатор имеет |
||||||||
линейными размерами, определяющими разрешаемый |
следующие технические характеристики: |
||||||||
объём РЛС. Для точечных целей выполняются |
Ризл - мощность зондирующего сигнала; |
|
|||||||
неравенства ℓцmax < R; ℓцmax < R· ; ℓцmax < R· , |
Рпрм min - чувствительность приёмника |
(минимальная |
|||||||
где ℓц - наибольший размер цели. |
|
|
мощность отражённого сигнала, обнаруживаемого с |
||||||
Самолёты и корабли обычно являются точечными |
заданной вероятностью на фоне шумов приёмника); |
||||||||
целями, если они находятся на большом удалении. |
GA - коэффициент усиления передающей антенны; |
||||||||
Распределёнными называют такие цели, линейные |
SA — эффективная площадь приёмной антенны. |
||||||||
размеры которых превышают линейные размеры |
|
|
|
|
|||||
разрешаемого объёма. |
|
|
|
|
|
|
|
|
|
Распределённые |
цели |
могут быть |
поверхностными |
|
|
|
|
||
(земная или водная поверхность) и объёмными (дождь, |
|
|
|
|
|||||
снег, облака). Сигнал, отражённый от распределённой |
|
|
|
|
|||||
цели, формируется за счёт отражений от большого |
|
|
|
|
|||||
числа относительно |
равномерно |
|
расположенных |
|
|
|
|
||
элементарных отражателей. Отражающую способность |
|
|
|
|
|||||
поверхностно и объёмно распределённых целей обычно |
|
|
|
|
|||||
характеризуют |
средней |
удельной |
отражающей |
|
|
|
|
||
поверхностью. |
|
|
|
|
|
|
|
|
|
Удельная ЭПР (эффективная площадь рассеяния) |
|
|
|
|
|||||
поверхностно распределённой цели есть ЭПР единицы |
|
|
|
|
|||||
поверхности. При этом |
|
|
|
|
|
|
|
|
|
S |
Э |
|
S |
S , |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
где S - удельная |
ЭПР; S - разрешаемый элемент |
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||
поверхности |
|
|
|
|
|
В |
случае ненаправленной передающей антенны |
|||||||||||||||||
Обычно |
угол наклона луча антенны мал. В |
этом |
||||||||||||||||||||||
излучаемая |
|
|
мощность Ризл |
на расстоянии R |
||||||||||||||||||||
случае: |
|
|
|
|
|
|
|
|
|
|
||||||||||||||
|
|
|
|
|
|
|
|
распределялась бы равномерно по поверхности сферы |
||||||||||||||||
|
|
|
|
R |
|
|
R R |
|
|
|||||||||||||||
S |
|
R |
|
|
4 R2, создавая на ней плотность потока мощности |
|||||||||||||||||||
cos |
cos |
|
|
|||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
P |
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
изл |
|
. |
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
1 |
|
4 R |
2 |
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
Для направленной передающей антенны в заданном |
||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
направлении плотность потока мощности будет больше |
||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
в GA раз (за счёт уменьшения для других направлений). |
||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
Поэтому, если антенна ориентирована на цель, то |
||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
P |
G |
A |
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
изл |
|
|
|
. |
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
1 |
4 |
R |
2 |
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
На цель (шар) падает мощность |
|
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
Рпад = П1· ·r2 = П1·Sэ |
где Sэ = |
·r2 – главное сечение |
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
шара. |
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
Полагаем, что цель металлическая и поэтому отражает |
||||||||||||
Удельная ЭПР объёмно распределённой цели есть ЭПР |
всю падающую на неё энергию |
|
||||||||||||||||||||||
Ротр |
= Рпад . |
|
|
|
|
|
|
|
|
|||||||||||||||
единицы объёма. При этом |
|
|
|
|
|
|
|
|
|
|
||||||||||||||
|
|
Шар отражает равномерно по всем направлениям , по- |
||||||||||||||||||||||
S |
|
|
|
|
|
|
V , |
|
|
|
|
|||||||||||||
Э |
|
|
|
|
|
|
этому плотность отражённого потока мощности П2 на |
|||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|||||||||||||||
где |
- удельная ЭПР; V - разрешаемый объём. |
|
||||||||||||||||||||||
|
раскрыве приёмной антенны можно найти, разделив |
|||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||
Распределённые цели обычно создают фон, на котором |
Ротр |
на поверхность |
сферы S |
радиуса R, центром |
||||||||||||||||||||
производится |
выделение сигналов |
обнаруживаемых |
||||||||||||||||||||||
которой является цель |
|
|
||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||
целей. |
|
|
Поэтому |
желательно |
уменьшать |
ЭПР |
|
|
|
Pот р |
|
|
|
|
|
|
||||||||
распределённых целей. Для этого |
нужно уменьшать 2 |
|
|
|
|
. |
|
|
||||||||||||||||
4 R 2 |
|
|
|
|
||||||||||||||||||||
разрешаемый |
объём, т.е. увеличивать разрешающую |
|
|
|
|
|
|
|
|
|||||||||||||||
способность РЛС по всем координатам. |
На вход приёмника с приёмной антенны поступит |
|
|
|
Pпрм = П2 ·SА. |
получим |
|
|
|
|
|
|
|
|
|
|
|
P |
|
P |
G |
|
S |
|
|
S |
|
. |
|
изл |
|
A |
|
|
A |
|
Э |
||||
|
|
|
|
|
|
|
|||||
прм |
|
( 4 ) |
2 |
R |
4 |
|
|
|
|||
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|||||
Максимальной дальности Rmax соответствует Рпрм min - мощность принятого сигнала, определяемая чувствительностью приёмника. С учётом этого
R |
|
4 |
P |
|
G |
|
S |
|
S |
|
. |
|
изл |
|
A |
|
A |
|
Э |
||||
|
|
|
|
|
|
|
|
||||
|
m ax |
|
P |
|
|
( 4 ) |
2 |
|
|
||
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
||||
|
|
|
прмm in |
|
|
|
|
|
|
|
|
11.Виды отражений
Различают зеркальное, диффузное и резонансное отражения радиоволн Зеркальное отражение возникает в том случае, когда
линейные размеры отражающей поверхности много больше длины волны, а сама поверхность является гладкой. Условия зеркального отражения можно представить в виде неравенств
ℓ ; h ,
где ℓ - наименьший линейный размер цели; - длина волны; h - высота неровностей поверхности.
При зеркальном отражении в соответствии с законами геометрической оптики угол отражения β равен углу падения α; отражённый луч CF лежит в плоскости, содержащей в себе нормаль к зеркалу СВ и падающий луч АС
При диффузном отражении отражатель рассеивает падающую на него энергию во всех направлениях (рис. 4, 5, 6). В отличие от зеркальной, такую поверхность иногда называют матовой, шероховатой. Для матовой поверхности законы отражения установлены Ламбертом. Они справедливы для дальней зоны, т.е. для таких расстояний, при которых угловые размеры отражателя близки к нулю.
Если поток излучения падает нормально к матовой поверхности, то мощность вторичного излучения под углом к нормали пропорциональна cos
P = P0 · cos .
Если поток излучения падает под углом к поверхности, то P = P1 · cos , где P1 = P0 · cos Следовательно, P = P0·cos ·cos .
Отражающая по Ламберту поверхность является идеализацией, к которой можно приблизиться искусственно, но которая не существует в естественных условиях. На практике размеры неровностей у одной и той же поверхности могут иметь широкий диапазон значений, поэтому реальные поверхности обычно дают смешанное отражение, в котором есть и диффузная и зеркальная компоненты
Фронтом волны называют поверхность, проведённую через точки одинаковых фаз волны. Если фронт волны плоский, то соответствующую волну называют плоской; если фронт волны образует сферу, то соответствующую волну называют сферической.
После отражения от плоской зеркальной поверхности плоская волна (АЕ) также остается плоской (FК) Однопозиционная РЛС получит отражённый сигнал от зеркальной поверхности только в том случае, когда эта поверхность перпендикулярна направлению на РЛС; в противном случае все отражённые лучи будут уходить в сторону и к РЛС не возвратятся. Поэтому зеркально отражающая поверхность (спокойное озеро, река, шоссе) обычно на экране РЛС выглядит тёмной Диффузное отражение возникает в том случае, когда выполняются соотношения
ℓ ; h ,
Диффузно отражающая поверхность создаёт вторичное излучение во всех направлениях, в том числе и в сторону радиолокатора.
Критерий зеркальности – диффузности
поскольку высота неровностей h может принимать любые промежуточные значения, то и отражательные свойства поверхностей могут быть промежуточными. Идеальное зеркало плоскую волну сохраняет идеально плоской благодаря тому, что все отражённые лучи остаются синфазными между собой. По мере роста неровностей эта синфазность постепенно разрушается, и фронт волны перестаёт быть плоским. Релей предложил считать зеркальной ту поверхность, для которой набег фазы между соседними лучами из-за неровностей не превышает , и диффузной - если
. При |
|
|
|
неровности |
эквифазной |
передающей антенны Gи, КНД приемной антенны Gп, а |
|||
поверхности не превышают величину |
|
чувствительность приемника (мощность порогового |
|||||||
= |
8. Можно показать, что в этом случае |
сигнала) Рс min. |
|||||||
подавляющая |
|
часть |
отражённого |
потока |
Плотность потока мощности создаваемого излучаемым |
||||
распространяется |
в |
|
направлении |
зеркального |
сигналом в месте расположения приемной антенны на |
||||
отражения. |
|
|
|
|
|
расстоянии R от передающей |
|||
Пересчитаем |
допустимую разность фаз в |
П |
Ри Gи |
|
|||||
допустимую |
высоту |
|
неровностей |
«зеркально» |
4 R |
2 |
, |
||
|
|
||||||||
отражающей поверхности h |
|
|
|
||||||
|
а мощность сигнала в приемной антенне |
||||||||
|
|
|
|
|
|
||||
Разность фаз для зеркальной по Релею поверхности
|
2 |
R |
2 |
2h sin |
|
. |
|
|
|
4 |
|||||
|
|
|
|
Таким образом, поверхность считается зеркальной, если
h |
|
, |
|
sin |
|||
16 |
|
и диффузной, - если знак неравенства обратный.
Резонансное отражение.
Переизлучение энергии падающей волны происходит вследствие вынужденных колебаний свободных или связанных зарядов в отражателе, создающих токи проводимости или токи смещения. Можно говорить о том, что всякое тело, способное переизлучать электромагнитную энергию, обладает собственной частотой колебаний электрических зарядов подобно тому, как это имеет место в электрическом колебательном контуре или механической колебательной системе. Если частота колебаний первичной волны совпадает с этой собственной частотой колебаний отражателя, то имеет место явление резонансного отражения. При резонансном отражении появляется также ярко выраженная направленность вторичного излучения.
ц n2 , n 1, 2, 3 ...
12. Дальность действия РЛС при активном
ответе
Под дальностью действия понимают максимальное расстояние R=Rmax, на котором принимаемый сигнал достигает минимально допустимого (порогового) уровня Рc = Рc min еще достаточного для выполнения системой основных функций с качественными показателями не хуже заданных.
Предположим, что в радиолинии используются радиоволны длиной п, мощность излучаемых передающей антенной колебаний Ри, ее КНД
|
|
|
|
Р G A |
|
Р G G |
2 |
||||||
P ПA |
|
|
|
||||||||||
и |
и |
|
п |
и |
и |
п |
|
и |
|||||
|
|
|
|
|
|
|
|||||||
c |
|
п |
|
4πR |
2 |
|
|
2 |
R |
2 |
|
||
|
|
|
|
|
|
4π |
|
, |
|||||
|
|
|
|
G |
|
|
|
|
|
|
|
|
|
|
S |
|
|
|
2 |
|
|
|
|
|
|
|
|
|
|
п |
и |
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
||
где |
|
эф |
|
4π |
|
—эффективная |
площадь приемной |
||||||
|
|
|
|
||||||||||
|
|
|
|
|
|||||||||
антенны.
При увеличении дальности R мощность принимаемого сигнала падает и достигает порогового уровня Рc = Рc
min, |
ограничивающего |
максимальное |
значение |
||||
дальности радиолинии |
|
|
|
|
|
||
|
|
|
|
|
|
2 |
|
|
|
R |
|
Р G G |
|
||
|
|
и |
и |
п и |
|
||
|
|
max |
|
4π |
P |
|
|
|
|
|
|
|
2 |
|
|
|
|
|
|
|
|
c min |
|
|
|
|
|
|
|
|
|
Радиолиния с активным ответом состоит из двух радиолиний связи: линии запроса и линии ответа. Для каждой из них можно найти максимальную дальность действия по формуле, присвоив параметрам, относящимся к линиям запроса и ответа, соответствующие индексы:
|
|
|
Р G G |
|
|
|
2 |
|
|||||||
R |
|
|
|
|
|
|
; |
||||||||
|
из |
из |
P |
пз |
|
|
из |
||||||||
|
|
|
|
|
|
||||||||||
|
з max |
|
4π |
2 |
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
cз min |
|
|
|||||
|
|
|
Р |
G G |
|
|
|
2 |
|
||||||
R |
|
|
|
|
|
. |
|||||||||
|
ио |
ио |
P |
по |
|
|
ио |
||||||||
|
о max |
|
4π |
2 |
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
cо min |
|
||||||
Результирующая дальность действия системы определяется радиолинией с меньшей дальностью действия.
Риз, из, Gиз |
|
ПРД |
R |
|
|
ПРМ |
|
Рсо min, Gпо |
R |
|
Рсз min,
ПРМ |
|
ПРД |
Рио, |
ио, |
условие баланса системы:
|
Риз |
|
Рио |
|
|
Рсз min |
Рсо min . |
||
13. |
Влияние на дальность действия РЛС |
|||
затухания радиоволн в атмосфере

Р20 – мощность сигнала на входе приемника при отсутствии затухания.
Р2 – мощность сигнала на входе приемника при наличие затухания радиоволн в атмосфере.
Р20 >Р2
При наличии затуханий мы имеем коэффициент затухания kз, который в свою очередь равен
|
|
10 lg |
P |
|
|
k |
|
2o |
|
||
з |
P |
|
|
||
|
|
|
|
||
|
|
|
2 |
, [дБ] |
|
|
|
|
|
||
|
|
|
|
|
|
На примере рассмотрим затухание радиоволн при активной системе. Коэффициент затухания в этом случае равен
k |
з |
2R |
, |
где |
[дБ/км(м)]- затухание |
на |
единице |
||||||
|
|
|
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
длины трассы. |
|
|
|
|
|
|
|
||||||
Тогда получаем выражения для Р2 |
|
|
|
|
|||||||||
2R 10 lg |
|
P2o |
0,2 R lg |
P2o |
100,2 R |
|
P2o |
|
|
||||
|
P2 |
P2 |
P2 |
|
|
||||||||
|
|
|
|
|
|
; |
; |
|
; |
||||
P2 |
|
P2o |
|
|
|
|
|
|
|
|
|
|
|
100,2 R |
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
||
В свою очередь мощность сигнала на входе приемника при отсутствии затухания равно
|
|
|
|
|
2 |
|
|
|
|
Р |
|
Р G G s |
|
|
|
|
|||
и и |
|
п |
и |
|
|
|
|
||
2о |
|
4 |
R |
|
|
|
|
|
|
|
|
|
3 |
|
4 |
|
|
|
|
|
|
|
|
|
. |
|
|
|
|
Из которого следует, что |
|
||||||||
|
|
|
|
|
|
|
2 |
|
1 |
|
|
P |
Р G G s |
|
|||||
|
|
|
и |
и |
п |
и |
|
|
|
|
|
|
|
|
|
||||
|
|
2 |
|
|
3 |
R |
4 |
10 |
0,2 R |
|
|
|
|
4 |
|
|
|||
При наличие затухания радиоволн в атмосфере, мощность на входе приемника равна мощности порогового сигнала, т.е. мощности сигнала при которой этот сигнал мы можем различить на фоне помех:
Р Р |
|
|
|
|
|
2 |
с min |
|
|
|
|
Тогда |
|
|
|
|
|
|
|
Р G G s 2 |
1 |
|
|
Pс min |
и и п и |
|
|
|
|
4 3 R4 |
100,2 Rmax |
||||
|
|
max |
. |
||
Дальность действия такой системы будет определяться следующим выражением
|
|
|
Р G G s 2 |
1 |
|
|
|||||
Rmax |
и и |
п |
|
и |
|
|
|
|
|||
|
4 |
|
4 3 P |
|
|
100,2 Rmax |
|||||
|
|
|
|
|
|
||||||
|
|
|
|
|
с min |
, |
|||||
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|||
|
|
Р G G s 2 |
|
Ro max |
|||||||
4 |
|
и и п |
и |
|
|||||||
|
4 3 Pс min |
|
|||||||||
где |
|
|
|
|
|
|
|
|
- дальность действия системы |
||
без учета затухания.
Конечное выражение для дальности действия системы при наличии затухания в атмосфере
Rmax |
|
Ro max |
|
|
100,2 Rmax |
|
. |
||
|
|
|
14. Влияние кривизны земной поверхности и атмосферной дифракции на дальность действия РЛС
Отражение радиоволн от земной поверхности:
Кривизна земной поверхности ограничивает дальность радиолокационного обнаружения.
Дальность прямой видимости (дальностью горизонта). |
||||||||||
R |
Г |
|
2r |
|
h |
A |
|
H |
Ц |
|
|
|
З |
|
|
|
|
|
|||
Если дальность радиолокационного наблюдения не превышает Rг, то расчет Rмакс выполняют по полученным интерференционным формулам с учетом поправки на кривизну Земли. При выполнении условия
h |
A |
H |
Ц |
учет сферичности Земли сводится к замене |
||||||||||
|
|
|||||||||||||
|
|
|
|
|||||||||||
истинной высоты расположения цели Hц |
||||||||||||||
приведенной высотой |
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
R |
2 |
|
|
|
|
|
|
H |
|
H |
|
H H |
|
|
|
|
|
|
|
|
|
|
ист |
Ц |
Ц |
2r |
|
|||||
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
, |
||
|
|
|
|
|
|
|
|
|
|
|
|
|
З |
|
где НЦ – высота цели; Нист – истинная высота цели;
|
R |
3 |
|
Н |
|
|
|
2r |
|
||
|
– параболическая высота цели; R – |
||
|
|
з |
|
|
|
|
|
расстояние до цели; rз – радиус земли.
При этом вид зоны обнаружения в вертикальной плоскости (диаграммы видимости) остается таким же, как и для «плоской» Земли, а ее поверхность имеет вид кривой.
Кривизна земной поверхности уменьшает дальность радиолокационного наблюдения низко расположенных объектов. Для сохранения дальности необходимо увеличивать высоту расположения антенны РЛС или энергетический потенциал станции, повышая энергию зондирующего импульса, направленность антенны и чувствительность приемника.
Влияние поглощения и преломления радиоволн наиболее существенно в нижнем основном слое атмосферы, называемом тропосферой. Тропосфера простирается по